超聲波感測器
超聲波信號轉換成其他能量信號感測器
超聲波感測器是將超聲波信號轉換成其他能量信號(通常是電信號)的感測器。超聲波是振動頻率高於20kHz的機械波。它具有頻率高、波長短、繞射現象小,特別是方向性好、能夠成為射線而定向傳播等特點。超聲波對液體、固體的穿透本領很大,尤其是在陽光不透明的固體中。超聲波碰到雜質或分界面會產生顯著反射形成反射回波,碰到活動物體能產生多普勒效應。超聲波感測器廣泛應用在工業、國防、生物醫學等方面。

超聲波感測器 - MB7780
超聲探頭的核心是其塑料外套或者金屬外套中的一塊壓 電晶片。構成晶片的材料可以有許多種。晶片的大小,如直徑和厚度也各不相同,因此每個探頭的性能是不同的,我們使用前必須預先了解它的性能。超聲波感測器的主要性能指標包括:
工作頻率就是壓電晶片的共振頻率。當加到它兩端的交流電壓的頻率和晶片的共振頻率相等時,輸出的能量最大,靈敏度也最高。
主要取決於製造晶片本身。機電耦合係數大,靈敏度高;反之,靈敏度低。
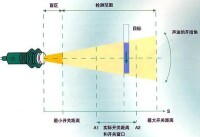
超聲波感測器探測的範圍

超聲波感測器
在工業方面,超聲波的典型應用是對金屬的無損探傷和超聲波測厚兩種。過去,許多技術因為無法探測到物體組織內部而受到阻礙,超聲波感測技術的出現改變了這種狀況。當然更多的超聲波感測器是固定地安裝在不同的裝置上,“悄無聲息”地探測人們所需要的信號。在未來的 應用中,超聲波將與信息技術、新材料技術結合起來,將出現更多的智能化、高靈敏度的超聲波感測器。
超聲波距離感測器技術應用
超聲波對液體、固體的穿透本領很大,尤其是在不透明的固體中,它可穿透幾十米的深度。
超聲波距離感測器可以廣泛應用在物位(液位)監測,機器人防撞,各種超聲波接近開關,以及防盜報警等相關領域,工作可靠,安裝方便,防水型,發射夾角較小,靈敏度高,方便與工業顯示儀錶連接,也提供發射夾角較大的探頭。
一、超聲波感測器可以對集裝箱狀態進行探測。將超聲波感測器安裝在塑料熔體罐或塑料粒料室頂部,向集裝箱內部發出聲波時,就可以據此分析集裝箱的狀態,如滿、空或半滿等。
二、超聲波感測器可用於檢測透明物體、液體、任何錶粗糙、光滑、光的密緻材料和不規則物體。但不適用於室外、酷熱環境或壓力罐以及泡沫物體。
三、超聲波感測器可以應用於食品加工廠,實現塑料包裝檢測的閉環控制系統。配合新的技術可在潮濕環如洗瓶機、噪音環境、溫度極劇烈變化環境等進行探測。
四、超聲波感測器可用於探測液位、探測透明物體和材料,控制張力以及測量距離,主要為包裝、制瓶、物料搬檢驗煤的設備運、塑料加工以及汽車行業等。超聲波感測器可用於流程監控以提高產品質量、檢測缺陷、確定有無以及其它方面。
使用超聲波感測器技術防止踩錯踏板
日產汽車開發出了防止在要踩剎車時誤踩成油門而使車輛加速的功能,使用攝像頭和超聲波感測器推斷出“要在停車場上停車”的情況時,如果駕駛員踩成了油門就會強制剎車。該技術預定在2~3年內實用化。超聲波感測器技術就是為了防止在停車場停車時踩錯剎車和油門造成事故而開發的。
該技術是使用在車輛前後左右各配備一個的四個攝像頭和前保險杠、后保險杠各配備四個共八個超聲波感測器實現的。4個攝像頭沿用顯示車輛周圍俯瞰影像的“環視顯示器”的攝像頭。利用攝像頭識別出白線等以推斷汽車位於停車場,利用超聲波感測器測量出汽車與周圍障礙物之間的距離來確定剎車時機。
防止因踩錯剎車和油門而造成事故分兩步實施。當駕駛員在停車場想停車時,如果踩成了油門,則首先將車速減至蠕滑速度,用儀錶板的圖標來提示危險,並響起警報聲。如果駕駛員仍繼續踩油門而即將撞上牆壁等物體時,則強制剎車。剎車時機為保證汽車在與障礙物相距20~30cm左右時可以停下來。
超聲波感測器
超聲波是一種在彈性介質中的機械振蕩,有兩種形式:橫向振蕩(橫波)及縱向振蕩(縱波)。在工業中應用主要採用縱向振蕩。超聲波可以在氣體、液體及固體中傳播,其傳播速度不同。另外,它也有折射和反射現象,並且在傳播過程中有衰減。在空氣中傳播超聲波,其頻率較低,一般為幾十KHZ,而在固體、液體中則頻率可用得較高。在空氣中衰減較快,而在液體及固體中傳播,衰減較小,傳播較遠。利用超聲波的特性,可做成各種超聲感測器,配上不同的電路,製成各種超聲測量儀器及裝置,並在通訊,醫療家電等各方面得到廣泛應用。

超聲波感測器
由發送感測器(或稱波發送器)、接收感測器(或稱波接收器)、控制部分與電源部分組成。發送器感測器由發送器與使用直徑為15mm左右的陶瓷振子換能器組成,換能器作用是將陶瓷振子的電振動能量轉換成超能量並向空中輻射;而接收感測器由陶瓷振子換能器與放大電路組成,換能器接收波產生機械振動,將其變換成電能量,作為感測器接收器的輸出,從而對發送的超聲波信號進行檢測。而實際使用中,用作發送感測器的陶瓷振子也可以用作接收器感測器社的陶瓷振子。控制部分主要對發送器發出的脈衝鏈頻率、占空比及稀疏調製和計數及探測距離等進行控制。
超聲波感測器
超聲波感測器
檢測模式
超聲波感測器主要採用直接反射式的檢測模式。位於感測器前面的被檢測物通過將發射的聲波部分地發射回感測器的接收器,從而使感測器檢測到被測物。
還有部分超聲波感測器採用對射式的檢測模式。一套對射式超聲波感測器包括一個發射器和一個接收器,兩者之間持續保持“收聽”。位於接收器和發射器之間的被檢測物將會阻斷接收器接收發射的聲波,從而感測器將產生開關信號。
檢測範圍

超聲波感測器
調節
幾乎所有的超聲波感測器都能對開關輸出的近點和遠點或是測量範圍進行調節。在設定範圍外的物體可以被檢測到,但是不會觸發輸出狀態的改變。一些感測器具有不同的調節參數,如感測器的響應時間、回波損失性能,以及感測器與泵設備連接使用時對工作方向的設定調節等。
重複精度

超聲波感測器
輸出功能
所有系列的超聲波感測器都有開關量輸出型產品。一些產品還有2路開關量輸出(如最小和最大液位控制)。大多數產品系列都能提供具有模擬量電流或是模擬電壓輸出的產品。
雜訊抑制
金屬敲擊聲、轟鳴聲等雜訊不會影響超聲波感測器的參數賦值,這主要是由於頻率範圍的優選和已獲專利的雜訊抑制電路。
同步功能

超聲波感測器
交替工作
超聲波感測器 超長掃描型
以交替方式工作的超聲波感測器彼此間是相互獨立的,不會相互影響。以交替方式工作的感測器越多,響應的開關頻率越低。
檢測條件
超聲波感測器特別適合在“空氣”這種介質中工作。這種感測器也能在其它氣體介質中工作,但需要進行靈敏度的調節。
盲區
直接反射式超聲波感測器不能可靠檢測位於超聲波換能器前段的部分物體。由此,超聲波換能器與檢測範圍起點之間的區域被稱為盲區。感測器在這個區域內必須保持不被阻擋。
溫濕度

超聲波感測器
空氣壓力
常規情況下大氣變化±5%(選一固定參考點)將導致檢測範圍變化±0.6%。大多數情況下,感測器在5Bar壓力下使用沒有問題。
氣流
氣流的變化將會影響聲速。然而由最高至10m/s的氣流速度造成的影響是微不足道的。在產生空氣渦流比較普遍的條件下,例如對於灼熱的金屬而言,建議不要採用超聲波感測器進行檢測,因為對失真變形的聲波的回聲進行計算是非常困難的。
標準檢測物
採用正方形聲反射板用於額定開關距離sn的標定。
1mm的厚度
垂直性:與聲束軸線垂直。
防護等級
外殼可防固體顆粒和防水。
IP65:完全防塵;防水柱的侵入。
IP67:完全防塵;在恆溫下浸入水下1m深處並放置30分鐘,能夠有效防護。
IP69K:基於EN60529的符合DIN40050-9
泵功能
可施行雙位置控制,例如一個液位控制系統的泵入泵出功能。當一個被測物遠離感測器到達檢測範圍的遠點時,輸出動作。當被測物靠近感測器到達檢測範圍設定的近點時,輸出相反的動作。
超聲波感測器主要由如下四個部分構成:
• 發送器:通過振子(一般為陶瓷製品,直徑約為15 mm)振動產生超聲波並向空中幅射。
• 接收器:振子接收到超聲波時,根據超聲波發生相應的機械振動,並將其轉換為電能量,作為接收器的輸出。
• 控制部分:通過用集成電路控制發送器的超聲波發送,並判斷接收器是否接收到信號(超聲波),以及已接收信號的大小。
• 電源部分:超聲波感測器通常採用電壓為DC12V ± 10 % 或 24V ± 10 %外部直流電源供電,經內部穩壓電路供給感測器工作。
超聲波感測器
根據被檢測對象的體積、材質、以及是否可移動等特徵,超聲波感測器採用的檢測方式有所不同,常見的檢測方式有如下四種:
• 穿透式:發送器和接收器分別位於兩側,當被檢測對象從它們之間通過時,根據超聲波的衰減(或遮擋)情況進行檢測。
• 限定距離式:發送器和接收器位於同一側,當限定距離內有被檢測對象通過時,根據反射的超聲波進行檢測。
• 限定範圍式:發送器和接收器位於限定範圍的中心,反射板位於限定範圍的邊緣,並以無被檢測對象遮擋時的反射波衰減值作為基準值。當限定範圍內有被檢測對象通過時,根據反射波的衰減情況(將衰減值與基準值比較)進行檢測。
• 回歸反射式:發送器和接收器位於同一側,以檢測對象(平面物體)作為反射面,根據反射波的衰減情況進行檢測。
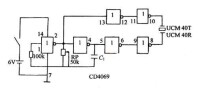
超聲波感測器用萬用表直接測試是沒有什麼反映的。要想測試超聲波感測器的好壞可以搭一個音頻振蕩電路,當C1為390OμF時,在反相器⑧腳與⑩腳間可產生一個1.9kHz左右的音頻信號。把要檢測的超聲波感測器(發射和接收)接在⑧腳與⑩腳之間;如果感測器能發出音頻聲音,基本就可以確定此超聲波感測器是好的。
註:C1=3900μF時,為1.9kHZ左右;C1=0.O1μF時,約0.76kHZ。
超聲波測量液位的基本原理是:由超聲探頭髮出的超聲脈衝信號,在氣體中傳播,遇到空氣與液體的界面后被反射,接收到回波信號後計算其超聲波往返的傳播時間,即可換算出距離或液位高度。超聲波測量方法有很多其它方法不可比擬的優點:(1)無任何機械傳動部件,也不接觸被測液體,屬於非接觸式測量,不怕電磁干擾,不怕酸鹼等強腐蝕性液體等,因此性能穩定、可靠性高、壽命長;(2)其響應時間短可以方便的實現無滯后的實時測量。
系統採用的超聲波感測器的工作頻率為40kHz左右。由發射感測器發出超聲波脈衝,傳到液面經反射后返回接收感測器,測出超聲波脈衝從發射到接收到所需的時間,根據媒質中的聲速,就能得到從感測器到液面之間的距離,從而確定液面。考慮到環境溫度對超聲波傳播速度的影響,通過溫度補償的方法對傳播速度予以校正,以提高測量精度。計算公式為:
V=331.5+0.607T (1)
式中:V為超聲波在空氣中傳播速度;T為環境溫度。
S=V ×t/2=V×(t1-t0)/2 (2)
式中:S為被測距離;t為發射超聲脈衝與接收其回波的時間差;t1為超聲回波接收時刻;t0為超聲脈衝發射時刻。利用MCU的捕獲功能可以很方便地測量t0時刻和t1時刻,根據以上公式,用軟體編程即可得到被測距離S。由於本系統的MCU選用了具有SOC特點的混合信號處理器,其內部集成了溫度感測器,因此可利用軟體很方便的實現對感測器的溫度補償。
超聲波感測器與聲納感測器的區別
高頻超聲波感測器
聲納感測器直接探測和識別水中的物體和水底的輪廓,聲納感測器發出一個聲波信號,當遇到物體後會反射回
來,依據反射時間及波型去計算它的距離及位置。超聲波是一種振動頻率高於聲波的機械波,由換能晶片在電壓的激勵下發生振動產生的,它具有頻率高、波長短、繞射現象小,特別是方向性好、能夠成為射線而定向傳播等特點。聲納感測器主要用於探測生物,比如用於探測水底有哪些生物,生物體形有多大等。經常問你聽說的用於探測水怪的裝置就是聲納感測器。
超聲波對液體、固體的穿透本領很大,尤其是在不透明的固體中,它可穿透幾十米的深度。超聲波碰到雜質或分界面會產生顯著反射形成反射成回波,碰到活動物體能產生多普勒效應。因此超聲波檢測廣泛應用在工業、國防、生物醫學等方面。超聲波感測器是利用超聲波的特性研製而成的感測器。在工業方面,超聲波的典型應用是對金屬的無損探傷和超聲波測厚兩種。超聲波感測器在醫學上的應用主要是診斷疾病,它已經成為了臨床醫學中不可缺少的診斷方法。
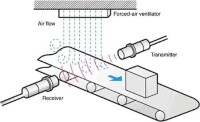
1:為確保可靠性及長使用壽命,請勿在戶外或高於額定溫度的地方使用感測器。
2:由於超聲波感測器以空氣作為傳輸介質,因此局部溫度不同時,分界處的反射和折射可能會導致誤動作,風吹時檢出距離也會發生變化。因此,不應在強制通風機之類的設備旁使用感測器。
3:噴氣嘴噴出的噴氣有多種頻率,因此會影響感測器且不應在感測器附近使用。
4:感測器表面的水滴縮短了檢出距離。
5:細粉末和棉紗之類的材料在吸收聲音時無法被檢出(反射型感測器)。
6:不能在真空區或防爆區使用感測器。
7:請勿在有蒸汽的區域使用感測器;此區域的大氣不均勻。將會產生溫度梯度,從而導致測量錯誤。
超聲波感測器應用起來原理簡單,也很方便,成本也很低。但是目前的超聲波感測器都有一些缺點,比如,反射問題,噪音,交叉問題。
反射問題
如果被探測物體始終在合適的角度,那超聲波感測器將會獲得正確的角度。但是不幸的是,在實際使用中,很少被探測物體是能被正確的檢測的。
其中可能會出現幾種誤差:
三角誤差
當被測物體與感測器成一定角度的時候,所探測的距離和實際距離有個三角誤差。
鏡面反射
這個問題和高中物理中所學的光的反射是一樣的。在特定的角度下,發出的聲波被光滑的物體鏡面反射出去,因此無法產生回波,也就無法產生距離讀數。這時超聲波感測器會忽視這個物體的存在。
多次反射
這種現象在探測牆角或者類似結構的物體時比較常見。聲波經過多次反彈才被感測器接收到,因此實際的探測值並不是真實的距離值。
這些問題可以通過使用多個按照一定角度排列的超聲波圈來解決。通過探測多個超聲波的返回值,用來篩選出正確的讀數。
噪音
雖然多數超聲波感測器的工作頻率為40-45Khz,遠遠高於人類能夠聽到的頻率。但是周圍環境也會產生類似頻率的噪音。比如,電機在轉動過程會產生一定的高頻,輪子在比較硬的地面上的摩擦所產生的高頻噪音,機器人本身的抖動,甚至當有多個機器人的時候,其它機器人超聲波感測器發出的聲波,這些都會引起感測器接收到錯誤的信號。
這個問題可以通過對發射的超聲波進行編碼來解決,比如發射一組長短不同的音波,只有當探測頭檢測到相同組合的音波的時候,才進行距離計算。這樣可以有效的避免由於環境噪音所引起的誤讀。
交叉問題
交叉問題是當多個超聲波感測器按照一定角度被安裝在機器人上的時候所引起的。超聲波X發出的聲波,經過鏡面反射,被感測器Z和Y獲得,這時Z和Y會根據這個信號來計算距離值,從而無法獲得正確的測量。
解決的方法可以通過對每個感測器發出的信號進行編碼。讓每個超聲波感測器只聽自己的聲音。
