全站儀
一種測繪儀器系統
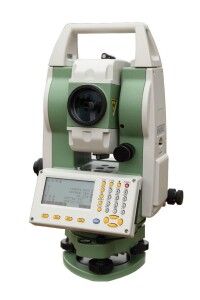
全站儀,即全站型電子測距儀(Electronic Total Station),是一種集光、機、電為一體的高技術測量儀器,是集水平角、垂直角、距離(斜距、平距)、高差測量功能於一體的測繪儀器系統。與光學經緯儀比較電子經緯儀將光學度盤換為光電掃描度盤,將人工光學測微讀數代之以自動記錄和顯示讀數,使測角操作簡單化,且可避免讀數誤差的產生。因其一次安置儀器就可完成該測站上全部測量工作,所以稱之為全站儀。廣泛用於地上大型建築和地下隧道施工等精密工程測量或變形監測領域。
全站儀與光學經緯儀區別在於度盤讀數及顯示系統,光學經緯儀的水平度盤和豎直度盤及其讀數裝置是分別採用(編碼盤)或兩個相同的光柵度盤和讀數感測器進行角度測量的。根據測角精度可分為0.5″,1″,2″,3″,5″,7″等幾個等級。
全站儀是全站型電子速測儀的簡稱,是電子經緯儀、光電測距儀及微處理器相結合的光電儀器。目前世界上全站儀的品牌主要有徠卡、拓普康、尼康、南方、索佳等。
全站儀是人們在角度測量自動化的過程中應運而生的,各類電子經緯儀在各種 測繪作業中起著巨大的作用。
全站儀的發展經歷了從組合式即光電測距儀與光學經緯儀組合,或光電測距儀與電子經緯儀組合,到整體式即將光電測距儀的光波發射接收系統的光軸和經緯儀的視准軸組合為同軸的整體式全站儀等幾個階段。
最初速測儀的距離測量是通過光學方法來實現的,我們稱這種速測儀為“光學速測儀”。實際上,“光學速測儀”就是指帶有視距絲的經緯儀,被測點的平面位置由方向測量及光學視距來確定,而高程則是用三角測量方法來確定的。
全數字鍵全站儀
隨著電子測距技術的出現,大大地推動了速測儀的發展。用電磁波測距儀代替光學視距經緯儀,使得測程更大、測量時間更短、精度更高。人們將距離由電磁波測距儀測定的速測儀籠統地稱之為“電子速測儀”(Electronic Tachymeter)。然而,隨著電子測角技術的出現。這一“電子速測儀”的概念又相應地發生了變化,根據測角方法的不同分為半站型電子速測儀和全站型電子速測儀。半站型電子速測儀是指用光學方法測角的電子速測儀,也有稱之為“測距經緯儀”。這種速測儀出現較早,並且進行了不斷的改進,可將光學角度讀數通過鍵盤輸入到測距儀,對斜距進行化算,最後得出平距、高差、方向角和坐標差,這些結果都可自動地傳輸到外部存儲器中。全站型電子速測儀則是由電子測角、電子測距、電子計算和數據存儲單元等組成的三維坐標測量系統,測量結果能自動顯示,並能與外圍設備交換信息的多功能測量儀器。由於全站型電子速測儀較完善地實現了測量和處理過程的電子化和一體化,所以人們也通常稱之為全站型電子速測儀或簡稱全站儀。
20世紀八十年代末,人們根據電子測角系統和電子測距系統的發展不平衡,將全站儀分成兩大類,即積木式和整體式。
20世紀九十年代以來,基本上都發展為整體式全站儀。
全站儀採用了光電掃描測角系統,其類型主要有:編碼盤測角系統、光柵盤測角系統及動態(光柵盤)測角系統等三種。
按其外觀結構分類
全站儀按其外觀結構可分為兩類:
(1)積木型(Modular,又稱組合型)
早期的全站儀,大都是積木型結構,即電子速測儀、電子經緯儀、電子記錄器各是一個整體,可以分離使用,也可以通過電纜或介面把它們組合起來,形成完整的全站儀。
(2)整體型(Integral)
隨著電子測距儀進一步的輕巧化,現代的全站儀大都把測距,測角和記錄單元在光學、機械等方面設計成一個不可分割的整體,其中測距儀的發射軸、接收軸和望遠鏡的視准軸為同軸結構。這對保證較大垂直角條件下的距離測量精度非常有利。
按測量功能分類

全站儀
(1)經典型全站儀(Classical total station)
經典型全站儀也稱為常規全站儀,它具備全站儀電子測角、電子測距和數據自動記錄等基本功能,有的還可以運行廠家或用戶自主開發的機載測量程序。其經典代表為徠卡公司的TC系列全站儀。
(2)機動型全站儀(Motorized total station)

免稜鏡全站儀
(3)無合作目標性全站儀(Reflectorless total station)
無合作目標型全站儀是指在無反射稜鏡的條件下,可對一般的目標直接測距的全站儀。因此,對不便安置反射稜鏡的目標進行測量,無合作目標型全站儀具有明顯優勢。如徠卡TCR系列全站儀,無合作目標距離測程可達1000m,可廣泛用於地籍測量,房產測量和施工測量等。
(4)智能型全站儀(Robotic total station)
在自動化全站儀的基礎上,儀器安裝自動目標識別與照準的新功能,因此在自動化的進程中,全站儀進一步克服了需要人工照準目標的重大缺陷,實現了全站儀的智能化。在相關軟體的控制下,智能型全站儀在無人干預的條件下可自動完成多個目標的識別、照準與測量。因此,智能型全站儀又稱為“測量機器人”,典型的代表有徠卡的TCA型全站儀等。
按測距儀測距分類

全站儀
(1)短距離測距全站儀
測程小於3KM,一般精度為±(5mm+5ppm),主要用於普通測量和城市測量。
(2)中測程全站儀
測程為3-15km,一般精度為±(5mm+2ppm),±(2mm+2ppm)通常用於一般等級的控制測量。
(3)長測程全站儀

自動陀螺全站儀
自動陀螺全站儀
由陀螺儀GTA1000與無合作目標全站儀RTS812R5組成的自動陀螺全站儀能夠在20分鐘內,最高以±5″的精度測出真北方向。
GTA1800R這款儀器實現了陀螺儀和全站儀的有機整合,GTA1000陀螺儀上架於RTS812R5系列全站儀。
GTA1800R在全站儀的操作軟體里實現和陀螺儀的通訊輕鬆完成待測邊的定向。
GTA1800R可以實現北方向的自動觀測,免去了人工觀測的勞動量和不確定性。
全站儀幾乎可以用在所有的測量領域。電子全站儀由電源部分、測角系統、測距系統、數據處理部分、通訊介面、及顯示屏、鍵盤等組成。
同電子經緯儀、光學經緯儀相比,全站儀增加了許多特殊部件,因此而使得全站儀具有比其它測角、測距儀器更多的功能,使用也更方便。這些特殊部件構成了全站儀在結構方面獨樹一幟的特點。

全站儀剖視圖
同軸性使得望遠鏡一次瞄準即可實現同時測定水平角、垂直角和斜距等全部基本測量要素的測定功能。加之全站儀強大、便捷的數據處理功能,使全站儀使用極其方便。
在儀器的檢驗校正中已介紹了雙軸自動補償原理,作業時若全站儀縱軸傾斜,會引起角度觀測的誤差,盤左、盤右觀測值取中不能使之抵消。而全站儀特有的雙軸(或單軸)傾斜自動補償系統,可對縱軸的傾斜進行監測,並在度盤讀數中對因縱軸傾斜造成的測角誤差自動加以改正(某些全站儀縱軸最大傾斜可允許至±6′)。,也可通過將由豎軸傾斜引起的角度誤差,由微處理器自動按豎軸傾斜改正計算式計算,並加入度盤讀數中加以改正,使度盤顯示讀數為正確值,即所謂縱軸傾斜自動補償。
雙軸自動補償的所採用的構造(現有水平,包括Topcon,Trimble):使用一水泡(該水泡不是從外部可以看到的,與檢驗校正中所描述的不是一個水泡)來標定絕對水平面,該水泡是中間填充液體,兩端是氣體。在水泡的上部兩側各放置一發光二極體,而在水泡的下部兩側各放置一光電管,用一接收發光二極體透過水泡發出的光。而後,通過運算電路比較兩二極體獲得的光的強度。當在初始位置,即絕對水平時,將運算值置零。當作業中全站儀器傾斜時,運算電路實時計算出光強的差值,從而換算成傾斜的位移,將此信息傳達給控制系統,以決定自動補償的值。自動補償的方式初由微處理器計算后修正輸出外,還有一種方式即通過步進馬達驅動微型絲桿,把此軸方向上的偏移進行補正,從而使軸時刻保證絕對水平。
鍵盤是全站儀在測量時輸入操作指令或數據的硬體,全站型儀器的鍵盤和顯示屏均為雙面式,便於正、倒鏡作業時操作。
全站儀存儲器的作用是將實時採集的測量數據存儲起來,再根據需要傳送到其它設備如計算機等中,供進一步的處理或利用,全站儀的存儲器有內存儲器和存儲卡兩種。
全站儀內存儲器相當於計算機的內存(RAM),存儲卡是一種外存儲媒體,又稱PC卡,作用相當於計算機的磁碟。
全站儀可以通過RS-232C通訊介面和通訊電纜將內存中存儲的數據輸入計算機,或將計算機中的數據和信息經通訊電纜傳輸給全站儀,實現雙向信息傳輸。
垂直度盤由主光柵、指示光柵、指示光柵座、軸和軸套組成,在垂直度盤安裝過程中會產生豎盤指標差和水平軸傾斜誤差。豎盤指標差是由於固定指示光柵安裝不正確引起的,是指當視准軸水平時,垂直度盤讀數不為90度。安裝好垂直度盤后,將儀器放在儀器墩上,照準與儀器大致同高的平行光管無窮遠處的目標,用盤左、盤右觀測目標的天頂距。則盤左:α=90°-L+I;盤右:α=R-270°-I 得I=1/2(L+R-360°)若指標差I超過規定的限差,則進行校正,校正分為兩種:一種是機械校正,一種是通過軟體校正。機械校正,鬆開指示光柵座與支架連接的4個螺釘,旋轉調整指示光柵座,再次進行盤左盤右測量計算指標差,直到滿足需要為止。軟體校正:啟動儀器的指標差校正程序,按顯示屏提示,盤左、盤右照準平行光管,提取指標差差值並存儲,經上述校正後,儀器顯示的角度為校正指標差后的值,即指標處於正確安裝位置時的值。水平軸傾斜誤差是由於支撐水平軸二支架的高度不等高造成的,當水平軸傾斜時會對水平角的測量有很大影響、在豎軸鉛直,視准軸與水平軸垂直的前提下:
①以水平軸中心O為圓心,任意長為半徑作球,HH1代表水平軸水平位置,H′H1′代表水平軸傾斜之角時的位置,豎直角度在H1一側,水平軸繞豎軸旋轉時,在各個方位上的傾斜角β是不變的。②當水平軸水平時,照準目標T,則垂直照準面是OZTM′,它在水平度盤上讀數為M′,如果水平軸傾斜β角,當視准軸指向天頂時,視准軸就不會在正確的OZ位置,而移至OZ′位置,用這樣的視准軸去照準目標T時,照準面為傾斜面OZ′TM,在水平度盤的讀數為M。弦長MM′=△β就是水平軸傾斜誤差對方向讀數的影響。作OZM垂直面,在球面三角形ZTM中,ZT=Z,LZMT=β,TM≈α,LTZM=△β,則由球面垂直角公式:sin△β=sinβ/sinz*sinα又因為β和△β為小角度,可得△β=βtgα,這就是水平軸傾斜誤差對水平角影響的關係式。對水平軸的傾斜誤差的檢定採用平、低(高)點法來檢定:在室內選定兩個點,一個高於水平視線,一個低於水平視線,且垂直角滿足α=-α,當觀測高點時:(L-R)=2L/cosα+2β*tgα當觀測低點時:(L-R)=2L/cosα+2β*tgα因α=∣α∣;則β=1/2(C-C)cotα當採用平、高讀時,只要將(L-R)=2C與(L-R)=2L/ cosα+2β*tgα具體操作根據軟體提示,盤耷拉、盤右分別照準水平平行光管,求解視准軸誤差和指示差β,再盤左、盤右照準點平行光管,求解視准軸誤差和指標差β,這時可根據上述公式求得水平軸傾斜誤差。當水平軸傾斜誤差過大時,可通過調整垂直度盤上的指示光柵座同支架的相對位置來校正,也可根據軟體進行補償。
全站儀具有角度測量、距離(斜距、平距、高差)測量、三維坐標測量、導線測量、交會定點測量和放樣測量等多種用途。內置專用軟體后,功能還可進一步拓展。
全站儀的基本操作與使用方法:
(1)按角度測量鍵,使全站儀處於角度測量模式,照準第一個目標A;
(2)設置A方向的水平度盤讀數為0°00′00〃;
(3)照準第二個目標B,此時顯示的水平度盤讀數即為兩方向間的水平夾角。
(1)設置稜鏡常數
測距前須將稜鏡常數輸入儀器中,儀器會自動對所測距離進行改正。
(2)設置大氣改正值或氣溫、氣壓值
光在大氣中的傳播速度會隨大氣的溫度和氣壓而變化,15℃和760mmHg是儀器設置的一個標準值,此時的大氣改正為0ppm。實測時,可輸入溫度和氣壓值,全站儀會自動計算大氣改正值(也可直接輸入大氣改正值),並對測距結果進行改正。
(3)量儀器高、稜鏡高並輸入全站儀。
(4)距離測量
照準目標稜鏡中心,按測距鍵,距離測量開始,測距完成時顯示斜距、平距、高差。
全站儀的測距模式有精測模式、跟蹤模式、粗測模式三種。精測模式是最常用的測距模式,測量時間約2.5S,最小顯示單位1mm;跟蹤模式,常用於跟蹤移動目標或放樣時連續測距,最小顯示一般為1cm,每次測距時間約0.3S;粗測模式,測量時間約0.7S,最小顯示單位1cm或1mm。在距離測量或坐標測量時,可按測距模式(MODE)鍵選擇不同的測距模式。
應注意,有些型號的全站儀在距離測量時不能設定儀器高和稜鏡高,顯示的高差值是全站儀橫軸中心與稜鏡中心的高差。
(1)設定測站點的三維坐標。
(2)設定后視點的坐標或設定后視方向的水平度盤讀數為其方位角。當設定后視點的坐標時,全站儀會自動計算后視方向的方位角,並設定后視方向的水平度盤讀數為其方位角。
(3)設置稜鏡常數。
(4)設置大氣改正值或氣溫、氣壓值。
(5)量儀器高、稜鏡高並輸入全站儀。
(6)照準目標稜鏡,按坐標測量鍵,全站儀開始測距並計算顯示測點的三維坐標。
全站儀的數據通訊是指全站儀與電子計算機之間進行的雙向數據交換。全站儀與計算機之間的數據通訊的方式主要有兩種,一種是利用全站儀配置的PCMCIA(personal computer memory card internation association,個人計算機存儲卡國際協會,簡稱PC卡,也稱存儲卡)卡進行數字通訊,特點是通用性強,各種電子產品間均可互換使用;另一種是利用全站儀的通訊介面,通過電纜進行數據傳輸。
全站儀盤左盤右
全站儀儀器的盤左和盤右,實際上沿用老式光學經緯儀的稱謂。是根據豎盤相對觀測人員所處的位置而言的,觀測時當豎盤在觀測人員的左側時稱為盤左,反之稱為盤右。相對盤左和盤右而言也有稱為正鏡和倒鏡,以及F1(FACE1)面和F2(FACE2)面的。
對於測量來講,若正、反(盤左、盤右)測量后,通過測量方法有可消除某些人為誤差以及固定誤差的作用。對於可定義盤左和盤右稱謂的儀器而言,給用戶增加了應用儀器的可選操作界面,對測量作業和測量結果沒有影響。
另外,對於靠角度確認盤左和盤右可能存在某些錯覺,例如某些連接陀螺儀的全站儀或者經緯儀,在確定盤左和盤右時顯示的不一定是對應。就是說相對180度角度數值而已往小向轉不一定是盤左。反正,用戶記住兩者的差值即可。儀器也是自動求算的,對工程測量結果沒有影響。
全站儀整平以及氣泡校正正確調平儀器的方法:
(1)架設:將儀器架設到穩固的三腳架上,旋緊中心螺旋。
(2)粗平:看圓氣泡(精度相對較低,一般為1分),分別旋轉儀器的3個腳螺旋將儀器大致整平。
(3)精平:使儀器照準部上的管狀水準器(或者稱長氣泡管)平行於任意一對腳螺旋,旋轉兩腳螺旋使氣泡居中(最好採用左拇指法,即左右手同時轉動兩個腳螺旋,並且兩拇指移動方向相向,左手大拇指方向與氣泡管氣泡移動方向相同。);然後,將照準部旋轉90°,旋轉另外一個腳螺旋使長氣泡管氣泡居中。
(4)檢驗:將儀器照準部再旋轉90°,若長氣泡管氣泡仍居中,表示已經整平;若有偏差,請重複步驟(3)。正常情況下重複1~2次就會好了。
氣泡是否有問題的檢驗:
精平同時進行檢驗:使儀器照準部上的管狀水準器(或者稱長氣泡管)平行於任意一對腳螺旋,旋轉兩腳螺旋使氣泡居中;然後,將照準部旋轉180°,此時若氣泡仍然居中,則管狀水準器軸垂直於豎軸(長氣泡管沒有問題)。如氣泡不居中,就需要校正。
校正方法:
(A)按照檢驗的步驟進行到第(3)步,確定偏差量即氣泡偏離中間的差量。
(B)用改針調整長氣泡管的校正螺釘,使氣泡返回偏差量的1/4。若前面的差量無法精確知道,這裡可大概改正;然後重複檢驗步驟的第(3)步驟。
(C)重複前面步驟,一般重複1~2次即可調好。調好后,再按照整平步驟進行儀器整平。
這裡提及一下,在長氣泡管調整后最好再確認一下圓氣泡,若有偏差也調一下。
補充:氣泡管氣泡為什麼會出現偏差?
原因:
(1)圓氣泡管一般由3個螺釘固定,內部有一個波形彈簧。若3個螺釘受力不均勻時,當儀器在車輛運輸過程中受顛簸就會引起受力小的螺釘鬆動,最後引起偏差,或者長時間使用造成螺釘鬆動。
(2)長氣泡管一般是一端固定,另外一端可調(校正螺釘)。可調端下面有彈簧,固定端裡面應該有凸形內墊圈。無論是生產裝配還是維修校正,若在長氣泡管調整時沒有注意校正螺釘的螺紋間距,使螺釘受力不均衡,在儀器受大的顛簸后螺釘會稍微旋轉、引起氣泡偏差。
保管時
1、儀器的保管由專人負責,每天現場使用完畢帶回辦公室;不得放在現場工具箱內。
2、儀器箱內應保持乾燥,要防潮防水並及時更換乾燥劑。儀器必須放置專門架上或固定位置。
3、儀器長期不用時,應以一月左右定期取出通風防霉並通電驅潮,以保持儀器良好的工作狀態。
4、儀器放置要整齊,不得倒置。
使用時
1、開工前應檢查儀器箱背帶及提手是否牢固。
2、開箱后提取儀器前,要看準儀器在箱內放置的方式和位置,裝卸儀器時,必須握住提手,將儀器從儀器箱取出或裝入儀器箱時,請握住儀器提手和底座,不可握住顯示單元的下部。切不可拿儀器的鏡筒,否則會影響內部固定部件,從而降低儀器的精度。應握住儀器的基座部分,或雙手握住望遠鏡支架的下部。儀器用畢,先蓋上物鏡罩,並擦去表面的灰塵。裝箱時各部位要放置妥帖,合上箱蓋時應無障礙。
3、在太陽光照射下觀測儀器,應給儀器打傘,並帶上遮陽罩,以免影響觀測精度。在雜亂環境下測量,儀器要有專人守護。當儀器架設在光滑的表面時,要用細繩(或細鉛絲)將三腳架三個腳聯起來,以防滑倒。
4、當架設儀器在三腳架上時,儘可能用木製三腳架,因為使用金屬三腳架可能會產生振動,從而影響測量精度。
5、當測站之間距離較遠,搬站時應將儀器卸下,裝箱後背著走。行走前要檢查儀器箱是否鎖好,檢查安全帶是否系好。當測站之間距離較近,搬站時可將儀器連同三腳架一起靠在肩上,但儀器要盡量保持直立放置。
6、搬站之前,應檢查儀器與腳架的連接是否牢固,搬運時,應把制動螺旋略微關住,使儀器在搬站過程中不致晃動。
7、儀器任何部分發生故障,不勉強使用,應立即檢修,否則會加劇儀器的損壞程度。
8、光學元件應保持清潔,如沾染灰沙必須用毛刷或柔軟的擦鏡紙擦掉。禁止用手指撫摸儀器的任何光學元件表面。清潔儀器透鏡表面時,請先用乾淨的毛刷掃去灰塵,再用乾淨的無線棉布沾酒精由透鏡中心向外一圈圈的輕輕擦拭。除去儀器箱上的灰塵時切不可作用任何稀釋劑或汽油,而應用乾淨的布塊沾中性洗滌劑擦洗。
9、在潮濕環境中工作,作業結束,要用軟布擦乾儀器表面的水分及灰塵后裝箱。回到辦公室后立即開箱取出儀器放於乾燥處,徹底涼干后再裝箱內。
10、冬天室內、室外溫差較大時,儀器搬出室外或搬入室內,應隔一段時間后才能開箱。
轉運時
1、首先把儀器裝在儀器箱內,再把儀器箱裝在專供轉運用的木箱內,並在空隙處填以泡沫、海綿、刨花或其它防震物品。裝好后將木箱或塑料箱蓋子蓋好。需要時應用繩子捆紮結實。
2、無專供轉運的木箱或塑料箱的儀器不應託運,應由測量員親自攜帶。在整個轉運過程中,要做到人不離開儀器,如乘車,應將儀器放在鬆軟物品上面,並用手扶著,在顛簸厲害的道路上行駛時,應將儀器抱在懷裡。
3、注意輕拿輕放、放正、不擠不壓,無論天氣晴雨,均要事先做好防晒、防雨、防震等措施。
電池
全站儀的電池是全站儀最重要的部件之一,在全站儀所配備的電池一般為Ni-MH(鎳氫電池)和Ni-Cd(鎳鎘電池),電池的好壞、電量的多少決定了外業時間的長短。
1、建議在電源打開期間不要將電池取出,因為此時存儲數據可能會丟失,因此請在電源關閉后再裝入或取出電池。
2、可充電池可以反覆充電使用,但是如果在電池還存有剩餘電量的狀態下充電,則會縮短電池的工作時間,此時,電池的電壓可通過刷新予以復原,從而改善作業時間,充足電的電池放電時間約需8小時。
3、不要連續進行充電或放電,否則會損壞電池和充電器,如有必要進行充電或放電,則應在停止充電約30分鐘后再使用充電器。
4、不要在電池剛充電后就進行充電或放電,有時這樣會造成電池損壞。
5、超過規定的充電時間會縮短電池的使用壽命,應盡量避免
6、電池剩餘容量顯示級別與當前的測量模式有關,在角度測量的模式下,電池剩餘容量夠用,並不能夠保證電池在距離測量模式下也能用,因為距離測量模式耗電高於角度測量模式,當從角度模式轉換為距離模式時,由於電池容量不足,不時會中止測距。
檢驗
(1)照準部水準軸應垂直於豎軸的檢驗和校正檢驗時先將儀器大致整平,轉動照準部使其水準管與任意兩個腳螺旋的連線平行,調整腳螺旋使氣泡居中,然後將照準部旋轉180度,若氣泡仍然居中則說明條件滿足,否則應進行校正。
校正的目的是使水準管軸垂直於豎軸.即用校正針撥動水準管一端的校正螺釘,使氣泡向正中間位置退回一半.為使豎軸豎直,再用腳螺旋使氣泡居中即可.此項檢驗與校正必須反覆進行,直到滿足條件為止。
(2)十字絲豎絲應垂直於橫軸的檢驗和校正
檢驗時用十字絲豎絲瞄準一清晰小點,使望遠鏡繞橫軸上下轉動,如果小點始終在豎絲上移動則條件滿足.否則需要進行校正.
校正時鬆開四個壓環螺釘(裝有十字絲環的目鏡用壓環和四個壓環螺釘與望遠鏡筒相連接。轉動目鏡筒使小點始終在十字絲豎絲上移動,校好后將壓環螺釘旋緊。
(3)視准軸應垂直於橫軸的檢驗和校正選擇一水平位置的目標,盤左盤右觀測之,取它們的讀數(顧及常數180度)即得兩倍的c(c=1/2(ɑ左-ɑ右)
(4)橫軸應垂直於豎軸的檢驗和校正選擇較高牆壁近處安置儀器。以盤左位置瞄準牆壁高處一點p(仰角最好大於30度),放平望遠鏡在牆上定出一點m1。倒轉望遠鏡,盤右再瞄準p點,又放平望遠鏡在牆上定出另一點m2。如果m1與m2重合,則條件滿足,否則需要校正。校正時,瞄準m1、 m2 的中點m,固定照準部,向上轉動望遠鏡,此時十字絲交點將不對準p點。抬高或降低橫軸的一端,使十字絲的交點對準p點。此項檢驗也要反覆進行,直到條件滿足為止。以上四項檢驗校正,以一、三、四項最為重要,在觀測期間最好經常進行。每項檢驗完畢后必須旋緊有關的校正螺釘。
隨著計算機技術的不斷發展與應用以及用戶的特殊要求與其它工業技術的應用,全站儀出現了一個新的發展時期,出現了帶內存、防水型、防爆型、電腦型等等的全站儀。
世界上最高精度的全站儀:測角精度(一測回方向標準偏差)0.5秒,測距精度 0.5mm+1ppm。利用ATR(Auto Targets Recognition,自動目標識別)功能,白天和黑夜(無需照明)都可以工作。全站儀已經達到令人不可致信的角度和距離測量精度,既可人工操作也可自動操作,既可遠距離遙控運行也可在機載應用程序控制下使用,可使用在精密工程測量、變形監測、幾乎是無容許限差的機械引導控制等應用領域。
全站儀這一最常規的測量儀器將越來越滿足各項測繪工作的需求,發揮更大的作用。
全站儀的測角系統與傳統光學經緯儀測角系統不同點全站儀的測角系統與傳統光學經緯儀測角系統相比較,主要有兩個方面的不同:
(1)傳統的光學度盤被絕對編碼度盤或光電增量編碼器所代替,用電子細分系統代替了傳統的光學測微器;
(2)由傳統的觀測者判讀觀測值及手工記錄變為觀測者直接讀數並自動記錄。
全站儀的測距系統與一般測距儀基本一致,只是體積更小,通常採用半導體砷化鎵發光二極體作為光源。不同廠家生產的不同類型及系列的全站儀,其最大測程和距離測量誤差均有較大變化。
全站儀的記錄系統又稱為電子數據記錄器,它是一種存儲測量資料的具有特定軟體的硬體設備。數據記錄器也有許多類型,但基本功能都一樣,起著全站儀與電子計算機之間的橋樑作用,它使野外記錄工作實現了自動化,減少了記錄計算的差錯,大大提高了野外作業的效率。全站儀記錄系統主要有三種形式:介面式、磁卡式和內存式。

基本信息
- 中文名
- 全站型電子測距儀
- 外文名
- Total Station
- 別名
- 全站儀
- 運用領域
- 地上大型建築和地下隧道施工等精密工程測量
- 類別
- 新型測角測距儀器
- 功能
- 在角度測量自動化的過程
- 儀器
- 光、機、電為一體高技術測量儀器