陀螺儀原理
陀螺儀原理
陀螺儀是用高速迴轉體的動量矩敏感殼體相對慣性空間繞正交於自轉軸的一個或二個軸的角運動檢測裝置。利用其他原理製成的角運動檢測裝置起同樣功能的也稱陀螺儀。

陀螺儀原理
陀螺儀基本上就是運用物體高速旋轉時,角動量很大,旋轉軸會一直穩定指向一個方向的性質,所製造出來的定向儀器。不過它必須轉得夠快,或者慣量夠大(也可以說是角動量要夠大)。不然,只要一個很小的力矩,就會嚴重影響到它的穩定性。
陀螺儀原理
而事實上,靜止與運動的陀螺儀本身並無區別,如果靜止的陀螺儀本身絕對平衡的話,拋除外在因素陀螺儀是可以不依靠旋轉便能立定的。
而如果陀螺儀本身尺寸不平衡的話,在靜止下就會造成陀螺儀模型傾斜跌倒,因此不均衡的陀螺儀必然依靠旋轉來維持平衡。
陀螺儀本身與引力有關,因為引力的影響,不均衡的陀螺儀,重的一端將向下運行,而輕的一端向上。
在引力場中,重物下降的速度是需要時間的,物體墜落的速度遠遠慢於陀螺儀本身旋轉的速度時,將導致陀螺儀偏重點,在旋轉中不斷的改變陀螺儀自身的平衡,並形成一個向上旋轉的速度方向。
當然,如果陀螺儀偏重點太大,陀螺儀自身的左右互作用力也將失效!。
而在旋轉中,陀螺儀如果遇到外力導致,陀螺儀轉輪某點受力。陀螺儀會立刻傾斜,而陀螺儀受力點的勢能如果低於陀螺儀旋轉時速,這時受力點,會因為陀螺儀傾斜,在旋轉的推動下,陀螺儀受力點將從斜下角,滑向斜上角。而在向斜上角運行時,陀螺儀受力點的勢能還在向下運行。這就導致陀螺儀到達斜上角時,受力點的剩餘勢能將會將在位於斜上角時,勢能向下推動。
而與受力點相反的直徑另一端,同樣具備了相應的勢能,這個勢能與受力點運動方向相反,受力點向下,而它向上,且管這個點叫“聯動受力點”。
當聯動受力點旋轉180度,從斜上角到達斜下角,這時聯動受力點,將陀螺儀向上拉動。
在受力點與聯動受力互作用力下,陀螺儀回歸平衡。
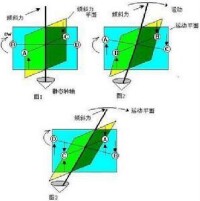
〖專業解釋〗我們不用一個完整的輪框,我們用四個質點ABCD來表示邊上的區域,這個邊對於用圖來解釋陀螺儀的工作原理是很重要的。軸的底部被托住靜止但是能夠各個方向旋轉。當一個傾斜力作用在頂部的軸上的時候,質點A向上運動,質點C則向下運動,如其中的子圖1。因為陀螺儀是順時針旋轉,在旋轉90度角之後,質點A將會到達質點B的位置。CD兩個質點的情況也是一樣的。子圖2中質點A當處於如圖的90度位置的時候會繼續向上運動,質點C也繼續向下。AC質點的組合將導致軸在子圖2所示的運動平面內運動。一個陀螺儀的軸在一個合適的角度上旋轉,在這種情況下,如果陀螺儀逆時針旋轉,軸將會在運動平面上向左運動。如果在順時針的情況中,傾斜力是一個推力而不是拉力的話,運動將會向左發生。在子圖3中,當陀螺儀旋轉了另一個90度的時候,質點C在質點A受力之前的位置。C質點的向下運動受到了傾斜力的阻礙並且軸不能在傾斜力平面上運動。傾斜力推軸的力量越大,當邊緣旋轉大約180度時,另一側的邊緣推動軸向回運動。
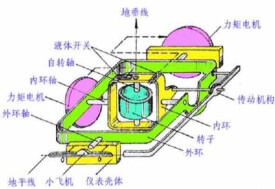
萬向節陀螺儀
陀螺儀原理
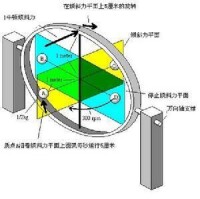
各模上的陀螺儀
從上面我們可以看到,陀螺儀的關鍵是軸的不變性。這樣的特性,看起來雖然簡單,但能使用在許多不同的應用上。制導武器就是陀螺儀的最關鍵應用之一。在慣性制導中,陀螺儀是控制武器飛行姿態的重要部件,在劇烈變化的環境中,沒有精心設計的陀螺儀用來保證穩定性和準確性,再好的控制規律也無法命中目標。除了制導之外,陀螺儀還能夠應用在其他的尖端的科技上。比如說,著名的哈勃天文望遠鏡的3個遙感裝置中每個都裝有一個陀螺儀和一個備份。3個工作的陀螺儀是保證望遠鏡指向所必不可少的。
陀螺儀正是因為它的平衡的特性,已經成為了飛行設備中關鍵的部件,從航模、制導武器、導彈、衛星、天文望遠鏡,無處沒有它的身影,陀螺儀默默的工作保證了這些飛行設備能按照指定的方式去工作。
隧道中心線測量

陀螺儀原理
通視障礙時的方向角獲取
當有通視障礙,不能從已知點取得方向角時,可以採用天文測量或陀螺經緯儀測量的方法獲取方向角(根據建設省測量規範)。與天文測量比較,陀螺經緯儀測量的方法有很多優越性:對天氣的依賴少、雲的多少無關、無須複雜的天文計算、在現場可以得到任意測線的方向角而容易計算閉合差。
日影計算所需的真北測定
在城市或近郊地區對高層建築有日照或日影條件的高度限制。在建築申請時,要附加日影圖。此日影圖是指,在冬至的真太陽時的8點到16點為基準,進行為了計算、圖面繪製所需要的高精度真北方向測定。使用陀螺經緯儀測量可以獲得不受天氣、時間影響的真北測量。