多重網路
多重網路
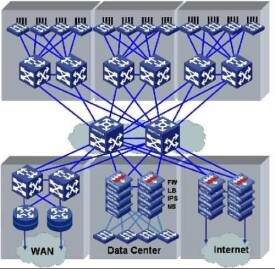
多徠重網路是指包括使用各不相同的通信媒體的一個以上的網路群組,對網路群組內存在的多個家電器件進行整合控制的網路管理器。
對網路群組內存在的多個家電器件進行整合控制的網路管理器;將從各網路群組接收的數據進行轉換並傳送給網路管理器,同時將從網路管理器接收的數據轉換為適合於各網路群組的數據並進行傳送,從而在使用各不相同的通信媒體的網路群組之間實現通信連接的通信媒體轉換器。
搭建多重網路設備應該是2005年最實際的設備網路化方案了。系統要保證legacy串口與CAN網的兼容性,同時提供基於CAN網程序的網路伺服器介面。基於瀏覽器安裝,能發現並解決問題以及在線文檔都可以系統自身解決。具體方法如下:?
要建設多重網路,需要許多戰略設備,包括子卡、CAN外部控制器和網關。一種新型的可行方法是選擇內嵌乙太網和CAN控制器的處理平台。這些處理器將串口、CAN和乙太網的信號連接一個信號包,使其價位相對於離線乙太網或CAN解決方案來說更具競爭力。
來自Freescale半導體的Cold Fire系列32位處理器是雙重網路控制器的典型代表。它們多數都將乙太網和CAN控制器整合到同一模型中,其中有些內嵌了快閃記憶體。Freescale的MCF523x處理器系列是下一代ColdFire嵌入式存儲器的典型。
實時操作系統RTOS是分配CPU完成控制與通信任務的嵌入式系統。在討論RTOS之前,很有必要說明一下許多系統放棄在現場網路中使用RTOS的兩個原因:花費太高而且產品簡單是他們不使用RTOS的原因。但是像Freescale的ColdFire產品這樣的高級處理器沒有RTOS是不能實現的,所以2005年很少會提及它的花費——這是人們放棄它的主要原因。事實上,喜愛使用RTOS方案的用戶了解真實的價格狀況,而非RTOS方法會隱瞞其價格。首先,任何乙太網方案都需要TCP/IP協議棧。不要小看這個免費的協議棧,其實在進出的時候總是收費的。當購買了TCP/IP協議棧后,你會發現它的花費未必少,甚至更多,這是因為其實RTOS中包含TCP/IP協議棧。第二,沒有RTOS系統,設計者經常需要執行一些內部日程安排表。沒有RTOS的系統實際都是比較複雜的,他們使用自產的RTOS來替代,這會造成龐大的後續支出。隨著時間的推移,想在自產操作系統中添加新特性變得十分困難,這是由於它不易改變的性質所造成的。結果沒有RTOS方案的花費會超過產品的生命周期。
缺少複雜性是RTOS不被採用的另一個原因。本文中,我們討論的是包含乙太網、CAN以及一個或更多串列通信埠的多重網路系統。從定義上來說,擁有這些網路介面的系統本身就是複雜的,並且需要RTOS對網路介面的複雜性和完全服務進行管理。如果系統可以提供DeviceNet、乙太網/IP和Modbus TCP通信的話,系統是不可能簡單的。
多數加強控制程序(包括多數控制部件移動的系統)需在三種要計算的情況下分配CPU資源:高級控制演演算法、低級控制功能和網路連接。高級控制演演算法是計算程序如何被控制的,這些演演算法是十分複雜的,需要佔用大量的內存和CPU資源。低級控制功能(比如定時功能)似乎十分簡單,但是需要較長的等待時間。為了保證服務,低級控制功能很可能幹擾信號,而這些由低級控制功能造成的中斷干擾將會影響高級控制演演算法的執行與表現。
ColdFire處理器支持將高級控制演演算法和低級控制功能集成於統一塊新品上。當ColdFire 的CPU執行RTOS和高級控制演演算法時,將會啟用名為eTPU的協處理器(內嵌定時處理單元)來處理所有定時干擾並完成低級控制功能。低級控制功能不會受到轉換帶來的影響,同時高級控制也不會被高速干擾中斷。
相徠比而言,其他多數處理器沒有處理低延遲干擾的資源,因此必須佔用CPU資源來滿足實時要求。協處理器eTPU解決了核心問題,使ColdFire CPU可以專心解決高級控制代碼。
不管是否選擇RTOS處理器平台,多重網路系統都需要一套網路協議。這些軟體可以處理位數據與位元組數據的轉換,並通過網路將數據傳送到相應的程序上去。對於現場網路來說,只需要一小套應用層協議。總體來看有以下幾個協議。
Modbus(串口)。Modbus是所有網路通信最早的標準,而且是列表中唯一的串口通信標準。每個設備都是由寄存器(16位無符號整數)和線圈(位)組成的。協議是由一套由簡練信息幀構成的指令集。設計者根據Modbus的容量執行串口驅動程序,所以從這些新的遺留設備中發送或接受的信號仍然十分重要。
DeviceNet(CAN)。DeviceNet是當今美國最重要的輸入/輸出(I/O)協議,是基於CAN技術的應用層協議。CAN支持單匯流排降壓拓撲結構。儘管CAN可以支持數千個結點並使數據的傳輸速率達到1M波特,但是DeviceNet會將網路結點數限制為64個,波特率控制為125K、250K和500K。DeviceNet是以主從關係為連接基礎的網路,主站設備向從站發出請求連接,可為非控數據和輸入輸出數據提供協議連接。一旦建立了輸入輸出連接,主站可通過論詢、循環或逢變則報通信模式與從站進行連接。
CANopen(CAN)。CANopen是另一個CAN應用層協議。不同的是DeviceNet更具連接導向,而CANopen更具信息導向。CANopen支持兩類基礎信息:服務數據信息和進程數據信息。服務數據信息是大型低優先順序信息,而進程數據信息是小型高優先順序數據。CANopen不是基於連接的,而是支持對等信息的協議。在量產模式下,CANopen設備只負責生產數據,而不關心誰去使用它。CANopen被歐洲廣泛接受,在美國的認可度也在提升。
EtherNet/IP。EtherNet/IP是應用於ControlNet和DeviceNet的控制與信息協議(CIP)技術的升級版。網路中每個設備都被視為一系列對象的屬性值。EtherNet/IP使用TCP(傳輸控制協議)來傳遞信息數據,用UDP(非連接設備協議)來傳遞輸入輸出數據。EtherNet/IP是乙太網與Rockwell自動化現場設備的通信標準。
Modbus/TCP。Modbus/TCP就是應用在TCP/IP之上的Modbus。Modbus/TCP使用與Modbus有相同屬性和功能的寄存器(16位無符號整數)和線圈(位)。除了Modbus/TCP的信息中不包含循環冗餘檢查欄位(CRC)外,Modbus和Modbus/TCP的所有信息都是一樣的。由於Modbus很簡單,它可以在現場設備系統中廣泛實現。
多重網路系統需要附加硬體組件和分層軟體模塊來提供超過產品生命周期的可靠的、可擴展系統。完成這個任務的一個辦法是選擇多廠家的物理介面、RTOS系統、TCP/IP棧和應用層協議。但當是單網路系統時,這個方法是很危險的,其危險性甚至超過使用多物理介面和多重應用層協議來處理多重網路。
一個更加高效、危險性小的方法的是選擇同一廠家提供的整合了所有物理介面、RTOS系統和應用層協議的包。比如Freescale的聯合設計項目(DAP),他們與ROTS和網路軟體廠家結成戰略夥伴,為用戶提供了大量選擇。這樣設計的多重網路系統可以選擇任意DAP項目廠家的軟體模塊,這些軟體模塊已經被整合到Freescale的硬體平台上。
不管你喜歡哪個廠家的晶元產品,如果你想建設多重網路平台,那就應該選擇高集成度的平台,這樣不但能減少危險,降低消耗和資源使用還能節約你進入市場所需的時間。
實時操作系統uC/0S II下TCP/IP協議棧的實現
摘要:結合ez80和ARM7兩種系統上的具體實現,說明了如何在嵌入式實時操作系統uC/0SII上移植實現LwIP這套TCP/IP協議棧,使uC/0S II成為支持網路的RTOS。
1 引言
隨著嵌入式系統與網路的日益結合,在嵌入式實時操作系統中引入TCP/IP協議棧,以支持嵌入式設備接入網路,成為嵌入式領域重要的研究方向。uC/0S II是近年來發展迅速的一個開放源碼實時操作系統,但它只是一個實時的任務調度及通信內核,缺少對外圍設備和介面的支持,如沒有文件系統、網路協議、圖形界面。筆者在多個嵌入式項目的開發過程中,以開源TCP/IP協議棧LwIP為基礎,給uC/0S II加上了網路支持。下面就以uC/0S II +LwIP分別在8位MCUez80和32位MCU ARM7TDMI上的實現為例進行說明。
需要說明的是,筆者使用的ez80系統是Zilog公司的ez80190開發板,自帶網路晶元。而ARM7系統是使用筆者參與開發的Skyeye,一個基於GDB的ARM7TDMI指令級軟體模擬器。Skyeye小組最近為Skyeye加上了軟體模擬的Ne2k兼容網路晶元,可以運行帶網路支持的μcLinux和uC/0S II。以下的全部相關程序和代碼都可以在Skyeye網站下載。
2 基於uC/0S II的網路平台概述
嵌入式操作系統uC/0S II是一個公開源代碼的佔先式多任務的微內核RTOS,其性能和安全性可以與商業產品競爭。uC/0S II的特點可以概括為以下幾個方面:公開源代碼,代碼結構清晰、明了,註釋詳盡,組織有條理,可移植性好。可裁剪,可固化。內核屬於搶佔式,最多可以管理60個任務。uC/0S II自1992年的第一版(uC/0S)以來已經有好幾百個應用,是一個經實踐證明好用且穩定可靠的內核。目前國內對uC/0S II的研究和應用都很多。
TCP/IP是Internet的基本協議,以其實用性、高效性已經成為事實上的工業標準。嵌入式設備要與Internet網路直接交換信息,就必須支持TCP/IP協議。目前嵌入式設備上TCP/IP方案有很多種,但面向低端應用的開源嵌入式網路平台還很少見。
uC/0S II是一個富有開放色彩的RTOS,只要買一本書就可獲得源代碼,對學校和教育的使用完全免費,商業應用的費用相對也很低。但是它目前的一些第三方TCP/IP支持都是完全商業化的,用戶需要付費才能獲得,很少給出源代碼,這影響了uC/0S II的研究和推廣。通過把開放源代碼的TCP/IP協議棧LwIP移植到uC/0S II上來,就獲得了一套可免費研究、學習的嵌入式網路軟體平台。
3 開源TCP/IP協議棧LwIP簡介
LwIP是瑞士計算機科學院(Swedish Institute of ComputerScience)的Adam Dunkels等開發的一套用於嵌入式系統的開放源代碼TCP/IP協議棧。LwIP的含義是Light Weight(輕型)IP協議。LwIP可以移植到操作系統上,也可以在無操作系統的情況下獨立運行。LwIP TCP/IP實現的重點是在保持TCP協議主要功能的基礎上減少對RAM的佔用,一般它只需要幾十K的RAM和40K左右的ROM就可以運行,這使LwIP協議棧適合在低端嵌入式系統中使用。
LwIP的特性如下:
(1) 支持多網路介面下的IP轉發
(2) 支持ICMP協議
(3) 包括實驗性擴展的的UDP(用戶數據報協議)

多重網路
(5) 提供專門的內部回調介面(Raw API)用於提高應用程序性能
(6) 可選擇的Berkeley介面API(多線程情況下)
我們目前使用的是LwIP的最新穩定版V0.5.3。有關LwIP的詳細內容,可以參考其代碼和網站上的文檔。
4 LwIP在uC/0S II下的實現
4.1 概述
LwIP協議棧在設計時就考慮到了將來的移植問題,因此把所有與硬體、OS、編譯器相關的部份獨立出來,放在/src/arch目錄下。因此LwIP在uC/0S II上的實現就是修改這個目錄下的文件,其它的文件一般不應該修改。下面分幾部份分別說明相應文件的實現原理和過程。具體的代碼限於篇幅沒有給出,Skyeye網站上有完整的代碼和說明。
4.2 與CPU或編譯器相關的include文件
/src/arch/include/arch目錄下cc.h、cpu.h、perf.h中有一些與CPU或編譯器相關的定義,如數據長度,字的高低位順序等。這應該與用戶實現uC/0S II時定義的數據長度等參數是一致的。
#define BYTE_ORDER LITTLE_ENDIAN //ARM7默認為小端存儲系統
//數據類型長度的定義
typedef unsigned char u8_t;
typedef signed char s8_t;
typedef unsigned shortu16_t;
typedef signed short s16_t;
typedef unsigned int u32_t;
typedef signed int s32_t;
此外還有一點:一般情況下C語言的結構體struct是4位元組對齊的,但是在處理數據包的時候,LwIP使用的是通過結構體中不同數據的長度來讀取相應的數據的,所以,一定要在定義struct的時候使用_packed關鍵字,讓編譯器放棄struct的位元組對齊。LwIP也考慮到了這個問題,所以,在它的結構體定義中有幾個PACKED_FIELD_xxx宏,默認的時候這幾個宏都是空的,可以在移植的時候添加不同的編譯器所對應的_packed關鍵字。比如在Skyeye(ARM7)上對應gcc編譯器的定義:
#define PACK_STRUCT_FIELD(x) x __attribute__((packed))
#define PACK_STRUCT_STRUCT __attribute__((packed))
#define PACK_STRUCT_BEGIN
#define PACK_STRUCT_END
4.3 sys_arch操作系統相關部份
sys_arch.[ch]中的內容是與OS相關的一些結構和函數,主要可以分為四個部份:
(1) sys_sem_t 信號量
LwIP中需要使用信號量通信,所以在sys_arch中應實現信號量結構體和處理函數:
struct sys_sem_t
sys_sem_new() //創建一個信號量結構
sys_ sem _free() //釋放一個信號量結構
sys_ sem _signal() //發送信號量
sys_ arch_sem _wait() //請求信號量
由於uC/0SII已經實現了信號量OS_EVENT的各種操作,並且功能和LwIP上面幾個函數的目的功能是完全一樣的,所以只要把uC/0SII的函數重新包裝成上面的函數,就可以直接使用了。
(2) sys_mbox_t 消息
LwIP使用消息隊列來緩衝、傳遞數據報文,因此要在sys_arch中實現消息隊列結構sys_mbox_t,以及相應的操作函數:
sys_mbox_new() //創建一個消息隊列
sys_mbox_free() //釋放一個消息隊列
sys_mbox_post() //向消息隊列發送消息
sys_arch_mbox_fetch() //從消息隊列中獲取消息
uC/0SII同樣實現了消息隊列結構OSQ及其操作,但是uC/0SII沒有對消息隊列中的消息進行管理,因此不能直接使用,必須在uC/0SII的基礎上重新實現。為了實現對消息的管理,我們定義了以下結構:
typedef struct {
OS_EVENT* pQ;
void* pvQEntries[MAX_QUEUE_ENTRIES];
} sys_mbox_t;
在以上結構中,包括OS_EVENT類型的隊列指針(pQ)和隊列內的消息(pvQEntries)兩部分,對隊列本身的管理利用uC/0SII自己的OSQ操作完成,然後使用uC/0SII中的內存管理模塊實現對消息的創建、使用、刪除回收,兩部分綜合起來形成了LwIP的消息隊列功能。
(3) sys_arch_timeout 函數
LwIP中每個與外界網路連接的線程都有自己的timeout屬性,即等待超時時間。這個屬性表現為每個線程都對應一個sys_timeout結構體隊列,包括這個線程的timeout時間長度,以及超時后應調用的timeout函數,該函數會做一些釋放連接,回收資源的工作。如果一個線程對應的sys_timeout為空(NULL),說明該線程對連接做永久的等待。
timeout結構體已經由LwIP自己在sys.h中定義好了,而且對結構體隊列的數據操作也由LwIP負責,我們所要實現的是如下函數:
struct sys_timeouts * sys_arch_timeouts(void)
這個函數的功能是返回目前正處於運行態的線程所對應的timeout隊列指針。timeout隊列屬於線程的屬性,因此是OS相關的函數,只能由用戶實現。
(4) sys_thread_new 創建新線程
LwIP可以是單線程運行,即只有一個tcpip線程(tcpip_thread),負責處理所有的tcp/ucp連接,各種網路程序都通過tcpip線程與網路交互。但LwIP也可以多線程運行,以提高效率,降低編程複雜度。這時就需要用戶實現創建新線程的函數:
void sys_thread_new(void (* thread)(void *arg), void *arg);
在uC/0S II中,沒有線程(thread)的概念,只有任務(Task)。它已經提供了創建新任務的系統API調用OSTaskCreate,因此只要把OSTaskCreate封裝一下,就可以實現sys_thread_new。需要注意的是LwIP中的thread並沒有uC/0S II中優先順序的概念,實現時要由用戶事先為LwIP中創建的線程分配好優先順序。
4.4 lib_arch中庫函數的實現
LwIP協議棧中用到了8個外部函數,這些函數通常與用戶使用的系統或編譯器有關,因此留給用戶自己實現。如下:
u16_t htons(u16_t n); //16位數據高低位元組交換
u16_t ntohs(u16_t n);
u32_t htonl(u32_t n); //32位數據大小頭對調
u32_t ntohl(u32_t n);
int strlen(const char *str); //返回字元串長度
int strncmp(const char *str1, const char *str2, int len); //字元串比較
void bcopy(const void *src, void *dest, int len); //內存數據塊之間的互相拷貝
void bzero(void *data, int n); //內存中指定長度的數據塊清零
前四個函數通常由用戶自己實現。Skyeye(ARM7)中,由於使用了gcc編譯器,gcc的lib庫里已經有了后四個函數。而ez80的編譯器函數庫中缺少bcopy和bzero兩個,需要自己編寫。用戶在其它CPU上實現時應根據自己的編譯器來決定。
4.5 網路設備驅動程序
ez80開發板自帶的網路晶元為RealTek的8019as晶元,這是ISA 10BASE-T的乙太網晶元,與Ne2k兼容。而我們在AT91模擬器Skyeye中所模擬的網路晶元也是Ne2k,所以目前實現的網路設備驅動是針對Ne2k的,其它類型的網路晶元驅動可以在LwIP的網站上找到。LwIP的網路驅動有一定的模型,/src/netif/ethernetif.c 文件即為驅動的模板,用戶為自己的網路設備實現驅動時應參照此模板。
在LwIP中可以有多個網路介面,每個網路介面都對應了一個struct netif,這個netif包含了相應網路介面的屬性、收發函數。LwIP調用netif的方法netif->input()及netif->output()進行乙太網packet的收、發等操作。在驅動中主要做的,就是實現網路介面的收、發、初始化以及中斷處理函數。驅動程序工作在IP協議模型的網路介面層,它提供給上層(IP層)的介面函數如下:
//網卡初始化函數
void ethernetif_init(struct netif *netif)
//網卡接收函數,從網路介面接收乙太網數據包並把其中的IP報文向IP層發送
//在中斷方式下由網卡ISR調用
void ethernetif_input(struct netif *netif)
//網卡發送函數,給IP層傳過來的IP報文加上乙太網包頭並通過網路介面發送
err_t ethernetif_output(struct netif *netif, struct pbuf *p, struct ip_addr *ipaddr)
//網卡中斷處理函數ISR
void ethernetif_isr(void);
以上的函數都可以分為協議棧本身的處理和對網路介面硬體的操作兩部份,但硬體操作是對上層屏蔽的,具體參見RTL8019as、DM9008等Ne2k網路晶元的數據手冊。驅動程序可以到Skyeye或LwIP的網站下載。
5 應用實例的建立和測試
做完上面的移植修改工作以後,就可以在uC/0SII中初始化LwIP,並創建TCP或UDP任務進行測試了。這部份完全是C語言的實現,因此這部份在ez80和ARM7上基本都是一樣的。值得注意的是LwIP的初始化必須在uC/0SII完全啟動之後也就是在任務中進行,因為它的初始化用到了信號量等OS相關的操作。關鍵部份的代碼和說明如下:
main(){
OSInit();
OSTaskCreate(lwip_init_task, &LineNo11, &lwip_init_stk[TASK_STK_SIZE-1], 0);
OSTaskCreate(usr_task,&LineNo12,&usr_stk[TASK_STK_SIZE-1],1);
OSStart();
}
主程序中創建了lwip_init_task初始化LwIP任務(優先順序0)和usr_task用戶任務(優先順序1)。lwip_init_task任務中除了初始化硬體時鐘和LwIP之外,還創建了tcpip_thread(優先順序5)和tcpecho_thread(優先順序6)。實際上tcpip_thread才是LwIP的主線程,多線程的Berkley API也是基於這個線程實現的,即上面的tcpecho_thread線程也要依靠tcpip_thread線程來與外界通信,這樣做的好處是編程簡單,結構清晰。
實用Berkley API實現的tcpecho_thread是一個TCP echo伺服器,*7號埠,程序框架如下:
void tcpecho_thread(void *arg){
conn = netconn_new(NETCONN_TCP); //創建新的連接標識
netconn_bind(conn, NULL, 7); //綁定到7號埠
netconn_listen(conn); //開始*埠
while(1){
newconn = netconn_accept(conn); //接收外部到來的連接
buf = netconn_recv(newconn) //獲取數據
……. //處理數據
netconn_write(newconn, data, len, NETCONN_COPY); //發送數據
netconn_delete(newconn); //釋放本次連接
}
}
基本信息
- 中文名
- 多重網路
- 外文名
- multimeshed network
- 定義
- 包括使用各不相同的通信媒體的一個以上的網路群組