自重構機器人
自重構機器人
模塊化自重構機器人(變形機器人 )能夠完成普通的固定構形機器人所無法完成的複雜操作,特別適用於工作環境變化大、操作任務複雜的場合,在空間操作、搶險搜救、反恐偵察、核電站維護等領域有著廣闊的應用前景。它可以構成能夠穿越狹小空間的蛇形機器人、能夠在不平路面上運動的多足行走機器人、可快速運動的滾動機器人、適於空間應用的柔性操作手等。由於電子學、微型機電系統及微型感測器技術的發展使得計算單元及微驅動、微感測器單元的體積越來越小,功能越來越強大,也有力的推動了自重構機器人由理論研究向工程實踐發展。
自從1988年 Fukuda提出的動態可重構機器人("Dynamically Reconfigurable Robotic System (DRRS)以來,自重構機器人以其優異的性能和廣闊的應用前景引起了各國機器人學者的關注。美日等國家的許多研究機構都開展了相關研究,並研製出了許多成功的實驗系統,在機器人模塊設計、重構演演算法、協調運動規劃方面取得了很大的進展。
Yim 在其文章中對自重構機器人定義如下:自重構機器人由許多標準模塊組成,依靠模塊上的感測器感知周圍環境信息,利用模塊間的可連接性和互換性通過模塊間的相互運動、連接/分離改變構型,擴展功能和運動形式。
根據自重構機器人模塊連接的拓撲結構,可以將其分為陣列式,串聯式和混合式三類:陣列式機器人模塊的連接是以規則的網格結構為參照,類似於晶體中原子之間的方位關係;串聯式機器人模塊以串聯方式相互連接,構成不同的樹狀結構,其中可能包含閉環結構;混合式自重構機器人兼具陣列式和串聯式的特點。

串聯式

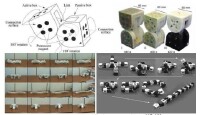
混合式
國內外自重構機器人的研究還大都停留在理論探索和物理模擬階段,距離實際應用還有很大距離,自重構機器人技術的研究仍存在許多問題和挑戰。自重構機器人的關鍵技術主要體現在以下幾個方面:
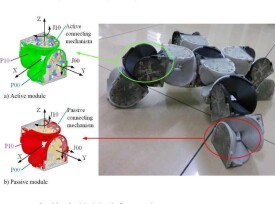
(1) 自重構機器人模塊研究 模塊是組成自重構機器人的最小單元,模塊的外形和功能直接影響自重構機器人的功能和環境適應性。自重構機器人的模塊選取何種外形最合理,自由度如何搭配最優,模塊間採用何種連接方式最為方便、可靠仍是主要研究熱點。
(2) 自重構機器人重構演演算法研究 構型可變是自重構機器人的最為顯著優勢之一,因而選擇什麼樣的構型和如何變換成為了自重構機器人的關鍵。儘管自重構機器人具有重構能力,但仍存在一定的約束條件,不能真正的像水一樣隨意流動,可以填充任意複雜形狀的容器,因此需要研究當前構型到目標構形是否可轉換,如何重構效率更高等問題。
(3) 自重構機器人協調運動規劃研究 由於自重構機器人構型多樣,因此如何規劃這些不同的構型使其更好的發揮功能十分重要。自重構機器人的一些構型是按照固定的規則序列變換而來,是已知的,屬典型構型;但還有一些構型是在特定的約束條件下生成的未知構型,因而協調運動規劃問題主要包含典型構型和未知構型的協調運動規劃。
基本信息
- 適用領域
- 工作環境變化大、操作任務複雜的場合,在空間操作、搶險搜救、反恐偵察、核電站維護等