旋轉磁場
旋轉磁場
旋轉磁場,磁感應矢量在空間以固定頻率旋轉的一種磁場;是電能和轉動機械能之間相互轉換的基本條件。廣泛應用於交流電機、測量儀錶等裝置中。
交流電機氣隙中的磁場。因其沿定、轉子鐵心圓柱面不斷旋轉而得名。旋轉磁場是電能和轉動機械能之間互相轉換的基本條件。
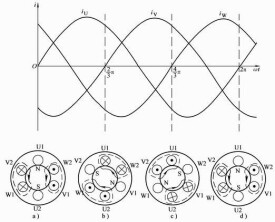
通常三相交流電機的定子都有對稱的三相繞組(見電樞繞組)。任意一相繞組通以交流電流時產生的是脈振磁場。但若以平衡三相電流通入三相對稱繞組,就會產生一個在空間旋轉的磁場。磁場的對稱軸線φ隨時間而轉動,其轉速ns由電壓頻率f和磁極對數P決定ns稱為同步轉速或同步速(以轉每分表示)。中國現在應用的工業電源的頻率f為50赫,於是兩極電機(P=1)的ns=3000轉/分;四極電機(P=2)的ns=1500轉/分。
徠隨時間在空間旋轉的磁場。它有圓旋轉磁場和橢圓旋轉磁場之分。
在空間環繞固定軸心以一定速度旋轉的磁場。可由電氣(如三相非同步電機定子繞組通以三相交流電時在空氣隙中產生)和機械(如同步電機的轉子磁極旋轉產生)的方法形成。
旋轉磁場是一種大小不變,而以一定轉速在空間旋轉的磁場。在對稱三相繞組中流過對稱三相電流時會產生一種旋轉磁場,該磁場隨電流交變而在空間不斷地旋轉著。
交流電機氣隙中的磁場。因其沿定、轉子鐵心圓柱面不斷旋轉而得名。旋轉磁場是電能和轉動機械能之間互相轉換的基本條件。
通常三相交流電機的定子都有對稱的三相繞組(見電樞繞組)。任意一相繞組通以交流電流時產生的是脈振磁場。但若以平衡三相電流通入三相對稱繞組,就會產生一個在空間旋轉的磁場。磁場的對稱軸線φ隨時間而轉動,其轉速ns由電流頻率f和磁極對數P決定ns稱為同步轉速或同步速(以轉每分表示)。中國現在應用的工業電源的頻率f為50赫,於是兩極電機(P=1)的ns=3000轉/分;四極電機(P=2)的ns=1500轉/分;余類推。
在一般情況下,電流變化一個周期,磁場軸線在空間就轉過一對極。
若近似地認為磁場沿圓周作正弦形分佈,並用磁場軸線處的空間矢量Ø;來代表,用矢量長度表示磁場振幅,則理論分析證明,三相對稱繞組通以平衡的三相電流時,產生的是一個振幅不變的旋轉磁場。這時矢量Ø;在旋轉過程中它的末端軌跡為一圓形,故名圓形旋轉磁場。這個結論可以推廣到一般的多相(包括兩相)系統。即多相電機對稱繞組通以平衡多相交流電流,則產生圓形旋轉磁場。
一般說來,旋轉磁場的轉向總是從電流超前的相移向電流滯后的相。如果將三相的3個引出線任意兩個對調再接向電源,即通入三相繞組的電流相序相反,則旋轉磁場的轉向也跟著相反。
如果三相電流不平衡,可用對稱分量法把三相電流系統分解為正序電流系統和負序電流系統。正序電流系統產生一個正向圓形旋轉磁場,負序電流系統產生一個反向圓形旋轉磁場。一般情況,兩個磁場振幅大小不等,其合成磁場矢量的末端軌跡為一橢圓形,故名橢圓形旋轉磁場。這個結論也可以推廣到一般的多相(包括兩相)電機。
磁感應強度矢量B的箭頭末端沿圓周移動的旋轉磁場。

徠
逆時針旋轉的磁場:三個線圈的始端A、B、C處通入負序的三相對稱電流,則在三個線圈的中心處O的磁感應強度矢量B的模B=3Bmp/2,但矢量B與x軸的夾角β=ωt。隨著時間的增加,磁感應強度矢量B的大小不變,卻以角速度ω作逆時針旋轉,故該磁場是逆時針旋轉的圓旋轉磁場。
三相電動機的正轉與反轉:三相電動機定子上三個線圈叫做定子繞組。將該電動機接於用戶端的三相電源線上,若通入定子繞組AX、BY、CZ始端的是正序的對稱三相電流,繞組電流會在電機內產生旋轉磁場,使電機正轉;若通入的是負序的對稱三相電流,則三相電動機反轉。三相電動機正常工作時一般是正轉的。這樣,三相電動機接到三相電源線之前,需先用相序指示器確定好三相電源線的A、B、C的相序。
磁感應強度矢量B的末端移動的軌跡為橢圓的旋轉磁場。當三個線圈不一樣或者是通入三個線圈始端的是正序(負序)不對稱三相電流,則隨著時間的增加磁感應強度矢量B末端移動的軌跡為橢圓,故該磁場為橢圓旋轉磁場。
產生的基本條件:兩個磁軛的幾何夾角與兩相激磁電流的相位差均不等於0度或180度。
所謂二極是指定子繞組通電后將定子鐵心內壁劃分為一對磁極,磁感應線發出的極面稱為N極,磁感應線進入的極面稱為S極。三相感應電動機主要由定子(電動機不動部分)和轉子構成。定子包括鐵心和繞組。定子鐵心由硅鋼片疊壓而成,鐵心內壁開槽,槽內安放定子繞組。定子繞組是定子的電路部分,由漆包銅(或鋁)線繞成,是三組材料、匝數、線徑、繞法、形狀、大小完全相同的線圈,且空間位置互成120°,稱為對稱三相繞組。
由於旋轉磁場的轉速與電源頻率有固定的關係,所以旋轉磁場的轉速稱為同步轉速。旋轉方向是順時針。說明是由電流超前的相轉向電流落後的相。
當定子三相繞組通入三相對稱電流后電動機內就產生一個右圖所示的旋轉磁場。磁場順時針旋轉就相當於轉子籠條(即鑄鋁的鋁條,籠條有很多根,右圖中只畫出兩根a1、a2作代表)a1、a2逆時針去切割磁感應線,於是在轉子籠條中產生感應電動勢和感應電流其方向右圖所示。由於轉子電流不是靠通電而是靠感應產生,所以稱為三相感應電動機。由安培定律可判斷出轉子籠條所受磁力方向。轉子在這個電磁力矩的作用下也將順時針轉動,即轉子的轉向與旋轉磁場的轉向是一致的。轉子的轉速與轉子轉軸所帶負載輕重有關,但轉子的轉速總要小於旋轉磁場的轉速,否則它將因不受電磁轉矩在阻力矩作用下慢下來。因而三相感應電動機又稱三相非同步電動機。二極電動機中轉子轉速一般在2800轉/分以上,與旋轉磁場的轉速相差很小。旋轉磁場的轉速用n1表示,轉子的轉速用n表示,則S=1-n/n1稱為感應電動機的轉差率。二極電動機的轉差率大約在0.02~0.06之間,可見它的轉子轉速變化範圍不大。由於轉子轉向與旋轉磁場轉向一致,而旋轉磁場轉向又由電流的相序決定,所以當調換兩根電源線時由於電流相序的改變旋轉磁場的轉向就要反向,從而轉子的轉向也就反向。可見三相感應電動機可通過任意調換兩根電源線方便地使轉子轉軸改變轉動方向。
三相感應電動機是靠通電後轉軸上帶負載把電能變成機械能的裝置。它有堅固耐用、價格便宜、便於維修、使用簡便等優點,但它也有起動轉矩不大、調速性能不好等缺點,在這方面直流電動機有明顯的優越性。
基本信息
- 中文名
- 旋轉磁場
- 外文名
- rotating magnetic field
- 含義
- 一種大小不變,而以一定轉速在空間旋轉的磁場
- 應用
- 交流電機、測量儀錶等裝置
- 拼音
- xuán zhuǎn cí chǎng
- 能量類型
- 電能和轉動機械能
- 分類
- 圓旋轉磁場和橢圓旋轉磁場