嫦娥二號衛星
嫦娥一號衛星的備份星
嫦娥二號衛星,是中國第二顆探月衛星、第二顆人造太陽系小行星,也是中國探月工程二期的技術先導星,由中國空間技術研究院研製,是中國第一顆探月衛星嫦娥一號衛星的備份星,沿用東方紅三號衛星平台,造價約6億元人民幣。
2010年10月1日18時59分57秒嫦娥二號衛星在西昌衛星發射中心由長征三號丙運載火箭成功發射升空,順利進入地月轉移軌道。
嫦娥二號完成了一系列工程與科學目標,獲得了解析度優於10米月球表面三維影像、月球物質成分分布圖等資料。2011年4月1日嫦娥二號拓展試驗展開,完成進入日地拉格朗日L2點環繞軌道進行深空探測等試驗。此後嫦娥二號飛越小行星4179(圖塔蒂斯)成功進行再拓展試驗,嫦娥二號工程隨之收官。
嫦娥二號已經成為太陽系的小行星,圍繞太陽做橢圓軌道運行,預計會在2020年前後回到地球附近。
2007年12月17日,在嫦娥一號衛星任務工程目標圓滿成功后,探月與航天工程中心組織各系統開展了備份星任務初步方案論證,並根據順序命名原則,將備份星命名為嫦娥二號。
2008年6月24日,嫦娥二號衛星專題研究會召開。
2008年7月作為衛星研製方的中國空間技術研究院完成第二輪總體方案論證工作並上報探月與航天工程中心。嫦娥二號衛星最終被確定為以嫦娥一號衛星為基礎,根據任務要求進行技術改進后,作為“探月二期工程先導星”,開展先期的飛行試驗。
2008年10月經國務院批准立項。
嫦娥二號衛星從任務設計開始,歷經方案、初樣、正樣、發射實施等階段,僅用了兩年多時間,完成了研製與發射實施任務。2008年,主要完成了整星方案設計,開展了頂層策劃、技術狀態清理及複核、總體規範制訂等研製工作。開展了任務軌道設計、大系統間介面協調、分系統技術規範制訂、X波段應答機等新產品技術攻關和針對任務要求和環境變化的專項試驗工作。
在頂層策劃方面,完成了各階段、各層級技術流程、專項試驗、質量保證與風險控制等項目工作。衛星系統直接進入正樣研製階段;新研單機及技術試驗分系統經歷方案、初樣、正樣完整階段;由於大部分單機為提高性能指標方面的修改類或新研類產品,故有效載荷分系統從初樣起步。在關鍵技術攻關同時,設計、開展推進氣路及490N發動機延壽、近月太陽翼高溫適應性、時間延遲積分(TDI-CCD)相機速高比補償等設計與驗證方面的15項專項試驗。
2009年,全面推進產品研製、系統集成和試驗驗證工作。完成了單機、技術試驗和有效載荷兩個分系統的初樣研製,完成了速高比補償對測定軌精度要求、15km軌道飛行大系統保證等專題協調,完成全部專項試驗。完成了正樣產品研製、總裝、AIT階段電性能測試和軟體/FPGA落焊工作。并行開展了軌道設計、空間單粒子效應防護等質量複查和複核復算,補充了“軌道設計、飛行程序、虹灣成像、監視相機/紫外成像”等技術專題研究與協調。於2009年8月通過正樣設計評審。2010年,研製隊伍完成了EMC、力學、熱真空等大型試驗,在衛星系統自身得到了全面、充分驗證的基礎上,完成了與運載對接、測控對接、大系統無線聯試等大系統對接試驗,驗證了系統間介面的正確、匹配性,於2010年6月完成了質量複查和出廠評審。
2010年7月10日,嫦娥二號衛星運抵西昌衛星發射中心。
嫦娥二號衛星系統有總體、綜合測試分系統和結構、熱控、制導/導航與控制(GNC)、推進、供配電、數據管理、測控數傳、定向天線、技術試驗(工程載荷)、有效載荷等13個分系統。衛星發射質量2480kg,乾重1169kg,攜帶166kg載荷(含136kg有效載荷和30kg工程載荷)。
根據運載的發射能力,嫦娥二號衛星發射重量相比嫦娥一號增加了130kg,燃料能夠提供約2.3km/s的總速度增量;在測控數傳能力方面,使用了LDPC編碼功能,相比卷積編碼提高增益約2.5dB;新增了工程載荷數據傳輸通道,設計了最低為23.4375kbps的多檔碼速率,可支持距地2000萬千米以遠的數據傳輸。在機動飛行能力方面,在基於高精度加速度計的軌道控制技術基礎上,在加速度計的測量區間、姿態控制補償、燃料量預估等方面進行設計改進,提升軌道控制精度;採用實時和延時強制卸載手段,實現姿態與軌道的耦合控制;使用自主慣性對準功能,提高了軌道控制自主性;設計新增大推力軌道維持功能,在保證可靠的前提下,提高了控制精度和自主性。此外,將推進系統工作壽命從3個月提升到6個月以上。
| 項目名稱 | 技術要求 |
| 衛星重量 | ≤2480kg |
| 衛星乾重 | ≤1175kg |
| 工作軌道 | 100km×100km |
| 試驗軌道 | 100km×15km |
| 衛星壽命 | 6個月 |
| 結構本體尺寸 | 2000mm×1720mm×2200mm |
| 對月指向姿控精度 | ≤±1°(3σ) |
| 對月指向姿控穩定度 | ≤0.005°/s |
| 推進方式 | 雙組元統一推進系統 |
| 供電輸出功率 | 1466W |
| 入射角 | 末期,45°入射角 |
| 測控體制 | USB+VLBI |
| 遙測碼速率 | 512bps/1024bps(編碼后) |
| 遙控碼速率 | 125bps |
| 編碼方式 | 卷積編碼/LDPC編碼 |
| 數傳調製方式 | BPSK |
| 數傳碼速率 | 6Mbps(3Mbps,1.5Mbps,750kbps,試驗12Mbps) |
嫦娥二號技術試驗分系統主要完成X頻段深空應答機、輕小型化CMOS相機等新技術在軌驗證。其中,X頻段星載測控子系統,主要用於完成面向深空應用的X頻段測控體制驗證。核心產品為X頻段高靈敏度數字化測控應答機。採用綜合電子技術,新研製了數據處理單元,主要完成新增設備的配電、遙測、遙控、數據存儲、復接控制等功能,並在軌驗證電子設備集成化技術。視頻子系統研製了多台輕小型相機,用於飛行過程中關鍵事件的監視成像。
| 項目名稱 | 技術要求 |
| X應答機載波捕獲門限 | -125dBm(5kHz/s掃描,±115kHz範圍內)-140dBm(20Hz/s掃描,±50kHz範圍內) |
| X頻段測控遙控碼速率 | 1000bps/125bps/7.8125bps |
| X應答機遙測碼速率 | 512bps(編碼后) |
| X應答機遙測通道編碼 | 卷積碼 |
| 數傳碼速率 | 6Mbps(3Mbps,1.5Mbps,750kbps,23.4375kbps) |
| 監視相機指標 | 彩色;解析度1024×1024;幀頻5fps;成像距離:1m~∞ |
嫦娥二號衛星共有10個分系統,可分為服務系統和載荷兩部分,服務系統包括:結構、熱控、制導/導航與控制(GNC)、推進、供配電、數據管理、測控數傳、定向天線和技術試驗等。載荷分系統由CCD立體相機、微波探測儀、太陽高能粒子探測器等多種載荷組成。
APS相機

降落相機高幀頻模式成像圖

490 N 發動機監視相機實物圖(352 g)
嫦娥二號衛星技術試驗分系統的1台降落相機和3台監視相機,用於對月表進行地形地貌探測,對490N發動機點火時段、定向天線展開和對地定向時段、太陽翼展開和轉動時段進行在軌實時監測。4台相機跟隨嫦娥二號衛星圓滿完成了半年壽命期的各項工程和科學探測任務,獲取了100和15km虹灣地區月表地形地貌圖,並取得太陽翼、490N發動機、定向天線等衛星活動機構和關鍵部件的大量在軌珍貴視頻。為後續工程實施奠定了堅實的基礎。
嫦娥二號衛星的4台APS小相機做為技術試驗分系統的主要設備,其目的是對相機進行新技術試驗驗證。主要包括幾方面的內容,即APS在軌成像技術,高度系統集成技術、自動曝光技術、高倍率壓縮技術、空間環境適應性成像設計等幾項關鍵技術。
相機設計技術指標
| 項目 | 降落相機 | 490N發動機監視相機 | 定向天線監視相機 | 太陽翼監視相機 | ||
| 譜段(nm) | 500~800 | 430~760 | 430~760 | 430~760 | ||
| 像元解析度 | 模式一:1280×1024(單色) | 1280×1024(彩色) | 1024×1024(彩色) | 1024×1024(彩色) | ||
| 模式二:640×512 | ||||||
| 焦距(mm) | 9.5,F=7 | 9.5,F=7 | 2.7,F=4 | 54,F=6.3 | ||
| 視場角() | 60 | 60 | 139 | 10 | ||
| 幀頻(fps) | 1,10 | 1 | 5 | 5 | ||
| 量化值(bit) | 8 | 8 | 8 | 8 | ||
| 最大信噪比S/N(dB) | 46.6 | 44.1 | 43.8 | 44.2 | ||
| 數據壓縮比 | 1:1;8:1 | 1:1 | 8:1 | 8:1 | ||
| 功耗(W) | 4 | 1.9 | 2.59 | 2.45 | ||
| 外形尺寸(mm) | 100×80×81 | 100×80×66 | 100×80×52 | 100×80×90 | ||
| 重量(g) | 502 | 352 | 368 | 395 |
))
CCD立體相機
簡述
嫦娥二號攜帶的是TDI—CCD相機,它採用多條線陣CCD對同一目標多次曝光原理,可以滿足解析度提高對相機曝光控制的要求,是中國相關載荷研製技術的一個重要突破,也是國際上首次在月球探測中使用。
TDI—CCD相機把圖像解析度從嫦娥一號的120米,提高到10米左右,在15公里軌道處甚至可以達到1米。
性能
嫦娥二號的CCD立體相機在滿足100km網軌道、7m解析度全月立體覆蓋的同時,還達到了局域1.3m解析度,可與美國“月球勘測軌道器”的窄視場高分辨相機相比較。嫦娥二號1台相機起到2台相機的作用,需要很大的成像動態範圍;另外,它是同軌立體的。
嫦娥二號CCD立體相機在15km軌道高度時,設計的空間解析度為1m,由於虹灣地區是一個凹陷的盆地,實際拍攝時衛星離月面的距離約為18.7km,因此實際圖像的空間解析度約為1.3m,滿足優於1.5m的工程目標,將為嫦娥三號著陸器選擇合適的降落區提供有價值的科學數據;7m空間解析度的全月立體圖像,將為月球科學家研究月球精細的地形地貌和地質學構造提供有價值的數據源。
在軌圖像獲取情況
嫦娥二號CCD立體相機共獲取607軌的月面立體圖像,其中在15km/100km橢圓軌道的近月弧段上獲取了空間解析度約為1.3m的35軌高清晰圖像,每軌圖像的月面尺寸約為8km~100km,可為嫦娥三號著陸器選擇安全、合適的著落點提供有價值的科學依據。虹灣地區的35軌高清晰圖像是在2個不同的時段上獲得的。
第1個時段為2010年10月26—29日,也就是嫦娥二號成功實施了變軌,從100km的圓軌道變為15km/100km的橢圓軌道期間,衛星在這一軌道上只能維持2天,每次只有1.5天的時間可供相機拍照。由於是首次在15km軌道高度上對月面成像,因此在正式成像前先進行了3軌試驗性拍攝,主要目的是選定合適的曝光量。試驗結果表明,以96級、2倍電子學增益最為有利,與事先評估結果相符。按此設置,獲得了16軌清晰的立體圖像。
第2個時段為2011年5月20日之後,也就是嫦娥二號已經完成全部工程目標和科學目標,作為任務擴展增加了1次對虹灣地區的高分辨成像,又獲得了16軌圖像。
此後,嫦娥二號飛離月球,到達日地系拉格朗日L2點繞飛軌道,執行新的擴展任務。在100km圓軌道上,嫦娥二號CCD立體相機共獲得了572軌空間解析度約為7m的立體圖像,實現了高分辨100全月立體覆蓋,這也是迄今為止國際上解析度最高、最清晰的全月面立體圖像。572軌圖像是在3個時段採集的。
第1個時段是2010年10月24—26日(即嫦娥二號首次進入100km圓軌道時),採集了34軌測試圖像。這次採集雖說是測試性的,但由於設定的曝光時間合適,圖像質量極佳,從而成為正式有效數據圖像的一部分。
第2個時段是從2010年11月2日(即嫦娥二號在完成第1次對虹灣地區成像、返回100km圓軌道后)到2011年初,共獲得370軌有效數據圖像,基本上完成了月球南北緯70度間的數據覆蓋。
此後,嫦娥二號進入為期3個月的側飛階段,相機無法工作。第3個時段為2011年4月22日轉入正飛後到5月20日,在這個過程中嫦娥二號調整軌道傾角,使其維持在90度,以獲得南北極極點附近的圖像,進行南北兩極圖像的補拍,共採集168軌極區圖像。至此,圓滿完成了嫦娥二號的科學目標。嫦娥一號CCD立體相機的圖像可得到1:150萬比例尺的數據圖像產品;嫦娥二號CCD立體相機的全月球圖像產品可達到1:8萬比例尺,對虹灣地區的局域圖像產品達到1:2萬比例尺。
X射線、γ射線譜儀
嫦娥二號搭載的γ射線譜儀的探測晶體由原來的碘化銫,改為新的材料——溴化鑭,使探測靈敏度提高了1倍多;X射線譜儀的譜段,也由原來的10KeV—60KeV,縮小為25KeV—60KeV。可以更好地探測月球表面9種元素——硅、鎂、鋁、鈣、鈦、鉀、釷、鈾的含量與分佈特徵,獲得更高空間解析度和探測精度的元素分布圖。
微波探測器
微波探測器只接收月面微波輻射的微波輻射計,所需能量小,可以接收4個頻段(3.0GHz、7.8GHz、19.35GHz、37GHz)的月面微波輻射,不同的微波頻段,可以帶來月表下不同深度的月壤或月岩信息。
嫦娥二號的微波探測器相比嫦娥一號沒有做太大改動。但是由於嫦娥二號的飛行軌道比嫦娥一號低,因此微波探測器天線波束在月面的覆蓋就會縮小,從而提高了探測的空間解析度。這些新的數據,可以結合嫦娥一號微波探測器的數據進行聯合分析,獲得更準確的月壤信息。
太陽高能粒子探測器
嫦娥二號衛星在軌運行期間,正值太陽活動高峰年,是探測研究太陽高能粒子事件、CME(日冕物質拋射,即太陽日冕中的物質瞬時向外膨脹或向外噴射的現象)、太陽風,及它們對月球環境影響的最佳探測時期。利用太陽高能粒子探測器和太陽風離子探測器,可獲取行星際太陽高能粒子與太陽風離子的通量、成分、能譜及其隨時空變化的特徵,用來研究太陽活動與地月空間及近月空間環境的相互作用。為後續探月工程提供環境科學數據。
在嫦娥二號衛星上,配合這七種有效載荷工作的還有一套管理系統,對這七台儀器進行指揮、控制、管理,並採集數據。其中的大容量存儲器為這次新研製的設備,它的存儲容量由嫦娥一號的48GB增加到128GB,而且吞吐速率更高,處理速度更快。這樣使七種有效載荷的工作效率更高、數據更可靠。
推進系統
嫦娥二號推進系統採用高性能的雙組元推進系統,嫦娥二號推進系統配置1台490N發動機,用於嫦娥二號衛星的軌道機動;配置12台10N推力器,分為2個分支互為備份,用於嫦娥二號衛星的姿態控制和軌道調整;配置2隻推進劑貯箱——氧化劑貯箱和燃燒劑貯箱,分別裝填氧化劑(四氧化二氮)和燃燒劑(甲基肼),為490N發動機和10N推力器提供需要的推進劑;配置1套氣路系統,在490N發動機點火期間為推進劑貯箱提供穩定壓力的氦氣,其中2個氦氣瓶是存儲高壓氦氣的容器,通過一隻減壓器將高壓氦氣減低並穩定到貯箱工作所需的壓力,兩隻單向閥用來阻止貯箱內推進劑蒸汽向減壓器擴散,避免因兩種推進劑蒸汽在減壓器下游接觸而發生爆炸的危險。
飛控支持系統
針對飛行任務的特點,首次系統性地提出了衛星飛控支持系統的整體框架和設計思路:基於數字模擬技術,解決相關關鍵部件的建模,使用統一的衛星姿態軌道動力學模型進行驅動,將數學模擬子系統、飛控演練子系統、視景模擬工具等獨立模塊有機結合,通過系統集成創新,實現了功能全面、實用的飛控支持系統。既可以通過輔助分析工具和數學模擬進行關鍵飛行事件的任務輔助設計來實現策略生成的實時性要,也可以通過面向執行層面的1:1的飛控過程演練二者有效結合,實現有效預示飛控任務執行效果的目的。
主要功能:
1)衛星姿態軌道動力學模型功能:飛控支持系統的動力學軟體環境具備精度高、自主選取的能力,可以根據軌道位置驅動,即根據軌道特性自主選擇主要軌道攝動力,實現對動力學模型調整的自適應能力。
2)輔助分析工具功能:基於數字模擬,產生關鍵任務中的姿態控制策略,利用天體矢量計算、定向天線指向計算、太陽翼指向計算、姿態機動的軌道擾動計算、發動機推力計算、相機/星敏感器雜光抑制計算等數學模塊完成相關模擬計算。
3)數學模擬子系統功能:不同於物理/半物理模擬系統,數學模擬子系統的設計完全軟體化,具有系統穩定性好、執行速度快、模擬結果一致性高等特點,能夠對正常模式的設計方案和故障模式策略方案進行多次模擬、驗證,獲得最優設計,也能夠對不同飛行狀態的衛星動力學模型建模的正確性進行及時驗證,在飛控策略的形成過程中,數學模擬子系統是一種有效的輔助設計工具。
4)飛控演練子系統:飛控演練子系統是針對任務執行層面的模擬.其模擬環境包括“軟”、“硬”兩方面,核心是由星載計算機與動力學模型構成的星地對接系統。該系統可以直接接收衛星用數據塊,對飛控過程進行全時段實時模擬,預示飛控執行過程,驗證飛控策略正確性、複核星上指令模塊的有效性。
5)視景模擬工具:視景模擬工具主要完成成像任務的預期成像效果,尤其是對於小行星飛越成像任務,視景模擬工具在動力學模型的驅動下,直接預示任務期間目標在視場中的尺寸、亮度、畸變、視運動情況、背景星空等效果,支持方案選取與模擬驗證。飛控支持系統的子模塊既可以聯合使用,對重要策略進行模擬驗證,也可以獨立使用,優化任務參數。以飛越“圖塔蒂斯”小行星事件為例,給出飛控支持系統進行地面模擬驗證工作流程。
有效載荷
註:衛星的有效載荷就是直接執行特定衛星任務的儀器、設備或分系統。
嫦娥二號衛星共配置了5類7台(套)科學探測儀器。使用了解析度高的CCD立體相機;提高了激光高度計的空間解析度和數據更新頻率。增加定標源、更換探測晶體,提高了γ/X射線譜儀的探測精度,擴展探測種類。
| 項目名稱 | 技術要求 |
| 有效載荷重量 | ≤140kg |
| 有效載荷功耗 | ≤200W |
| CCD立體相機成像方式 | 單物鏡成像,線陣推掃 |
| CCD相機月表解析度 | 優於10m(100km×100km)優於1.5m(100km×15km) |
| 激光高度計測距解析度 | 1m |
| γ射線譜儀儀器能量解析度 | 4%@662keV |
| X射線譜儀低能探測器能量解析度 | ≤[email protected] |
| X射線譜儀高能探測器能量解析度 | ≤10%@59.5keV |
| 微波探測儀探測頻率 | 分別為3.0GHz,7.8GHz,19.35GHz,37GHz |
| 微波探測儀帶寬 | 分別大於100MHz,200MHz,500MHz,500MHz |
為準備嫦娥二號發射,西昌衛星發射中心進行了百餘項技術改進。發射場系統對上百項相關設備設施進行了改造,包括更新測量雷達、更新遙測系統、改造光學儀器、優化加註系統等。

嫦娥二號衛星
2010年9月28日,嫦娥二號衛星和運載火箭進行了發射前最後一次總檢查,發射中心全面戒嚴。
2010年9月29日下午,嫦娥二號進行最後一次模擬發射合成演練。
| 時間(2010年10月1日) | 飛行時間 | 事件 |
| 11時 | 正式進入發射程序,舉行最後一次氣象“大會商” | |
| 13時30分 | -5.5時 | 氣象報告出爐,開始低溫為火箭加註液氫 |
| 17時 | 進入射前系統,地面開始給系統加電 | |
| 18時20分 | -40分 | 2號塔架迴轉平台從上而下逐級展開 |
| 18時45分 | -15分 | 最後一批勤務人員離開2號發射塔架 |
| 18時58分27秒 | -93秒 | 火箭從地面供電轉為系統內部電池供電 |
| 18時58分57秒 | -63秒 | 倒計時60秒,準備點火發射 |
| 18時59分57秒 | -3秒 | 點火 |
| 19時0分0秒 | 0秒 | 起飛 |
| 19時2分7秒 | +127.4992秒 | 助推器分離 |
| 19時2分23秒 | +143.4972秒 | 一二級分離 |
| 19時4分15秒 | +255.4117秒 | 拋掉整流罩 |
| 19時5分24秒 | +324.7087秒 | 二三級分離 |
| 三級一次關機 | ||
| 三級二次點火 | ||
| 三級二次關機 | ||
| 末速修正關機 | ||
| 19時25分33秒 | +1533秒 | 星箭分離 |
| 19時55分許 | 發射場區指揮部指揮長李尚福宣布發射成功 |

整流罩墜落在江西遂川
地月轉移
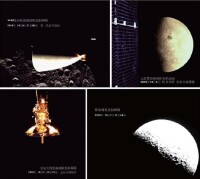
嫦娥二號衛星監視相機在軌成像
2010年10月2日凌晨3點39分左右,嫦娥二號完成第一次地月成像。
嫦娥二號驗證了直接地月轉移軌道設計與飛行技術,轉移時間由12天縮短為5天。在嫦娥一號的基礎上,設計改進得到驗證:控制精度提高,控制自主能力增強,共節省推進劑207kg。首次成功驗證了紫外導航、CMOS視頻小相機成像等先進技術。首次獲取了完整的地月空間環境探測數據。
月球捕獲
2010年10月6日上午11時06分35秒,北京航天飛行控制中心發出第一次制動指令,1942秒后,嫦娥二號被月球捕獲,進入環月軌道成功實施第一次近月制動,進入周期約12小時的橢圓環月軌道。
2010年10月6~9日,嫦娥二號衛星共實施了3次近月制動和1次軌道平面機動,控後衛星準確進入半長軸約1840km、高度約100km、周期118min的極月圓軌道。首次驗證100km月球軌道捕獲技術;基於工程可靠實施而專門設計軌道平面機動,為一個月內實施近月15km軌道機動奠定了基礎。
環月探測
嫦娥二號衛星在環月飛行階段初期實施月球背面降軌控制並獲取虹灣區高解析度圖像,完成了既定的各項技術試驗驗證。於2010年11月2日轉入長期運行管理階段。在環月150天期間,共實施2次飛行姿態轉換、3次軌道維持以及月食控制。按照科學計劃開展各項科學探測任務,重點完成了全月面高精度成像。
月球軌道深化探測
2011年4月14和15日,實施調整軌道傾角控制,用490N發動機,將傾角從92°調整到90°,消耗推進劑35kg。在2011年4月25日開始的正飛期內,重點補拍月球南北兩極圖像,將月球立體影像覆蓋率從99.6%提高至100%。
2011年5月20日,再次降軌,獲取更多虹灣區域1m級高解析度圖像,不同前次,此次用490N發動機完成補充驗證性控制,消耗推進劑26kg。
日地拉格朗日探測
在國際上首次實現了從月球軌道飛往日地L2點的轉移和試驗方案。具體實施過程如下:
2011年6月8~9日,經過2次精確加速后飛離月球,飛往日-地拉格朗日L2點。
2011年8月,成功到達日-地拉格朗日L2點,開始進行載荷科學探測。
2012年4月,圓滿完成在L2點一個完整擬周期的飛行探測。嫦娥二號成功繞飛日-地L2點,驗證了深空軌道設計與飛行控制、150萬千米的遠距離測控通信等技術,驗證了L2軌道保持特性,並在日-地L2點開展了10個月的科學探測,填補了中國對地球遠磁尾區域的離子能譜、太陽耀斑爆發和宇宙伽瑪爆的科學探測的空白。
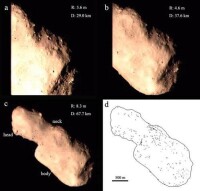
4179 號小行星照片1 (曝光時間: 7 ms)
2012年12月15日,嫦娥二號衛星飛離日地拉格朗日L2點195天後,飛抵距地球約700萬公里遠的深空,與圖塔蒂斯小行星由遠及近擦身而過,至此,嫦娥二號再拓展試驗成功,嫦娥二號工程收官。
2013年1月5日23時46分嫦娥二號突破距地球1000萬千米。
2013年2月28日10時18分,嫦娥二號衛星與地球間距離成功突破2000萬公里。
2013年7月14日1時許,嫦娥二號突破距離地球5000萬公里。
2013年11月26日,嫦娥二號突破距離地球6100萬公里。
2014年年中,嫦娥二號突破距離地球1億公里的深空。
嫦娥二號衛星狀態良好,將不斷刷新距地飛行高度,考核衛星的壽命及自主控制與管理能力,並協同我國深空測控站開展行星際測控通信試驗。
2011年8月25日,嫦娥二號經過77天飛行,受控準確進入距離地球約150萬公里遠的日地L2點的環繞軌道。這是中國第一次開展拉格朗日點轉移軌道和使命軌道的設計和控制,並實現150萬公里遠距離測控通信。此舉也使中國成為世界上第三個造訪日地L2點的國家和組織,也是世界上第一個實現從月球軌道出發抵達該點的國家和組織。
嫦娥二號衛星既定任務的飛行軌道包括直接地月轉移軌道,近月捕獲軌道,100km和100km×15km使命軌道。擴展任務段包括月球逃逸軌道(調相軌道)、轉移軌道、日-地L2點環繞軌道和小行星交會軌道等。
嫦娥二號衛星除完成具有時間窗口唯一性的月球制動,還需要完成工程其他既定任務,包括後續著陸任務中動力下降前的所有軌道機動試驗;擴展任務包括環繞L2點飛行和4179小行星交會控制等。環月探測中兩次機動降軌試驗必須安排在不可測控弧段,從100km圓軌道降至100km*15km橢圓軌道。
衛星整個飛行任務可劃分為相對獨立的7個階段:射前準備階段、主動段、調相軌道階段、地月轉移階段、月球捕獲階段、環月工作狀態建立階段和環月運行階段。
1)飛行過程式控制制複雜。嫦娥一號需要經過380000km飛行過程實現月球捕獲,嫦娥二號衛星則還需要經過100km×100km和100km×15km試驗環月軌道。需要經歷多次複雜的軌道和姿態機動,對衛星軌道控制要求高。
2)空間環境複雜。突出表現在月食問題,嫦娥一號衛星在壽命期內,需經歷兩次月食,每次月食的有效陰影時間在3h左右。在此期間,衛星無法獲得光照能源,衛星溫度會迅速降低,因此,對衛星能源、溫度、整星工作模式要求高。
3)三體組合控制模式複雜,衛星環月期間,星體要對月定向,太陽翼要對日定向,定向天線要對地定向,因此對衛星本體、太陽翼、天線的姿態控制要求高。
4)新研和改進的設備多,嫦娥二號衛星除包含嫦娥一號衛星中的6種有效載荷,還增加了技術試驗分系統,包括X頻段應答機、降落相機等工程載荷,因此衛星系統智能終端類型複雜,對衛星的信息收集、存儲、壓縮、編碼等處理模式有特殊要求。
為避免撞擊(月球山最高超過10km),實現近月15km穩定飛行也依賴自主可靠和高精度的軌道控制。而擴展任務的實現同樣需要高精度的軌道控制,如從月球軌道出發進入L2點的轉移軌道,對速度控制的敏感度較高。逼近小行星的控制除需要高精度軌控,同時對軌控策略的可靠性要求較高。

嫦娥二號衛星飛行軌道示意圖
(1)設計並驗證了後續著陸任務中動力下降前的所有軌道與機動飛行控制技術,直接進入地月轉移軌道、首次使用X頻段測控、對嫦娥三號著陸區進行高解析度成像。
(2)針對月球不均勻重力場及高起伏地形環境,突破月球擬凍結軌道設計、衛星自主慣性對準、機動軌道拼接等關鍵技術,首次成功實現100km圓軌道和100km×15km軌道飛行,首次實現在月球背面無測控條件下主發動機點火變軌。衛星軌道控制精度最高達到0.02%。
(3)在國際月球探測中,首次採用時間延時積分(TDI)成像技術,設計了由地面行頻數據注入和測高數據輔助兩種速高比補償成像方法,獲得了7m解析度的全月球立體影像;獲得了1.3m解析度的局部影像,達到國際先進水平。
(4)創新研製首台基於統一載波體制的X頻段高靈敏度數字化測控應答機,實現了深空探測領域星載測控技術的多項突破。在軌試驗驗證了X頻段深空測控體制和技術。突破了差分單向測距(DOR)干涉測量、X頻段數字化應答機和地面S/X雙頻段測控設備研製等關鍵技術,測速精度達到1mm/s、測距精度達到1m,實現了7.8125bps極低碼速率遙控
(5)突破微小型智能化設計技術,首次實現了地月空間飛行過程監視成像。首次實時獲取了太陽翼展開、天線展開/轉動、主發動機點火等關鍵環節的動態圖像,為後續重要飛行事件提供了可視化手段。
(6)首次在航天工程中於空間段應用了LDPC編解碼,編碼增益和效率等主要指標優於國際(CCSDS)標準,提高了中國在國際深空通道編解碼領域的地位和話語權。
(7)首次在軌驗證了推進系統高壓氣路長壽命技術,為高強度(時間跨度半年以上,次數10次以上)軌道機動及後續L2點、小行星探測試驗奠定動力基礎。
(8)首次突破探測敏感器、載荷一體化技術,利用成像敏感器完成星地大迴路導航試驗。
(9)在地月星和日地星雙三體複雜環境下,針對日、地引力平動點攝動複雜、軌道設計無解析解、測控距離遠等難點,攻克了非線性系統流形設計、低能量轉移軌道控制等技術,實現了從月球軌道飛赴L2點的軌道設計、飛行控制和遠距離測控通信。在國際上首次實現從月球軌道飛赴日-地拉格朗日L2點探測。開展了對地球遠磁尾離子能譜、太陽耀斑爆發和宇宙伽馬爆的科學探測。使我國成為繼美、歐之後第3個實現L2點開展空間探測的國家。
(10)突破距地1000萬千米遠的深空軌道和測控通信技術,首次實現行星際飛行。基於能量、距離和時間及目標物理特性等強約束,提出潛在小行星目標選取策略,在國際上首次設計並實現了逼近飛越探測方式及基於高速交會漸遠點凝視成像技術。國際上首次成功逼近飛越4179圖塔蒂斯小行星並獲取3m解析度光學彩色圖像。
(11)創新利用拉格朗日點伴地繞日特性,在衛星推進劑、星地通訊距離、地面大天線進度等約束條件下,國際上首次實現從拉格朗日點轉移飛越小天體。
(12)通過創新設計、全面驗證、精心實施,充分利用衛星剩餘資源,發揮衛星潛能,從月球到L2再到圖塔蒂斯,實現了具有國際特色和水準的多目標多任務探測,取得了“好、快、省”的突出實效。
(13)通過對以往研究成果的轉化、應用,開展國內外多站專項觀測,實現了目標小行星定軌和預報,精度達到國際先進水平。
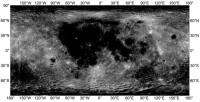
嫦娥二號衛星獲取的全月圖
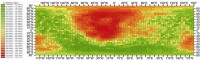
月球表面釷元素分布圖
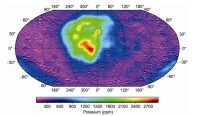
月球表面鉀元素分布圖
通過“嫦娥二號”的任務及拓展實驗,獲得了“嫦娥三號”的預選著陸區——虹灣地區的高解析度圖象;驗證了在月球背面不可看到的情況下,採用主發動機大推力自主軌道的機動技術,為“嫦娥三號”軟著陸進行了技術驗證,也奠定了良好的基礎。
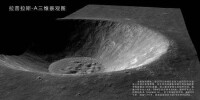
虹灣地區
《新聞聯播》調整報道形式
《新聞聯播》打破常規,在國慶節當天採用“畫中畫”模式在節目開始直播“嫦娥二號”衛星發射。
在中央電視台新聞頻道在直播嫦娥二號發射實況過程中,當指揮員宣布“點火”並按下點火按鈕兩、三秒后。按原定時間表播放報時信號及《新聞聯播》,但卻採用“畫中畫”(屏幕右下角)模式在節目開始直播嫦娥二號衛星發射,為開播以來第一次以此方式現場直播,至《新聞聯播》片頭結束后始恢復正常。其後在19時25分05秒至27分11秒,《新聞聯播》再次現場直播了“嫦娥二號”星箭分離的實況。
疑助推器飛越台上空引發騷動
在嫦娥二號發射后的晚上七點左右,在台灣台北縣、宜蘭、花蓮、台東太麻里有大批民眾目睹一個“紅色的燃燒狀球體,像倒立的香菇”拖著藍色的尾巴由北往南飛越天空,過程約五至十秒;而嫦娥二號發射過程中,也經台灣海峽往東飛越北台灣上空,由於不像火流星的跡象,故初步研判為搭載之長征三號丙火箭的推進器掉進大氣層時飛越台灣上空,但當初台灣媒體關注於2010年9月30日發生的水沙連高速公路北山交流道鷹架崩塌意外,在這之前亦沒有多加報道嫦娥二號發射訊息,導致當時眾人誤以為是飛機爆炸墜機,引發不小的騷動。
整流罩掉落幾公里內有震感
2010年10月1日晚19時11分許,嫦娥二號衛星整流罩分別墜落在江西遂川縣茶鄉湯湖鎮的南屏、橫圳兩個村,一處距湯湖鎮政府以北南屏村1公里處的農田裡,農田砸出了一個大坑,坑深達1.5米;另一處距鎮政府橫圳7公里處,當地人武部門趕赴現場處置。整流罩墜落時傳來前後兩聲“砰”聲巨響,周圍幾公里有比較強烈的震感,當地群眾按照傳來聲響的方向找過去,分別發現兩塊整流罩,並立即報告鎮政府。
| 獲獎時間 | 獲獎名稱 | 所獲獎項 | 頒發單位 |
|---|---|---|---|
| 2012年 | 嫦娥二號工程 | 國家科學技術進步獎特等獎 |
