差動齒輪
控制航空微型機器人飛行的機器
差動齒輪可用於控制航空微型機器人的飛行,未來可用於監控環境危害、森林火災和其它對人類帶來威脅的區域。

差動齒輪
多國的科學家正在積極研究探索廉價的航空微型機器人,使其未來可部署於搜尋和營救操作,環境監控和探索對人類有害的環境。為了成功飛行穿越無法預測的環境,航空微型機器人必須實現逐秒級狀態變化,通常昆蟲飛行是通過協調一致地拍打翅膀,這一過程中運動學和空氣動力學的基礎性原理很難理解。
斯里薩拉和同事羅伯特-伍德(Robert J. Wood)認為,基於昆蟲原理的航空微型機器人並不需要複雜的電子反饋線圈來精確控制翅膀的位置。伍德說:“由於航空微型機器人機翼產生的扭轉力,我們對於機翼的位置並不感興趣。我們的最新技術使用‘機械智能’來測定機翼的校準飛行速度,並測定影響機器人飛行平衡的其它作用力產生的振幅。”
他們還發現,即使當航空微型機器人機翼的至關重要部分被移除,被動航空失衡控制差動齒輪(PARITy)的動力傳動系統也可產生自校正,使微型機器人在空中飛行保持平衡。在該微型差動齒輪驅動下,航空微型機器人的機翼可每分鐘拍打6600次。
哈佛大學工程師稱,這種新型差動齒輪可有效地調節飛行中產生的作用力,適宜與電子感測器和計算機系統相結合。它將使現代航空機器人的質量變得更小,其尺寸和重量更加接近於一些昆蟲。

圖1 平旋盤傳動結構示意圖
負號表示平旋盤與主軸旋向相反。
封閉式差動齒輪箱是一種特殊類型的行星傳動裝置,由於具有結構緊湊、單位重量傳遞功率大、速比大等優點,在機械上尤其在對傳動裝置的體積及重量有較嚴格要求的工程機械上廣泛應用。國外此類產品已成系列,如德國REXROTH公司、美國FAIRFIELD等公司的系列產品,大量應用於工程及築路機械中。在我國由於開發產品較晚,故應用尚不普遍。為滿足某單位新型拌和機產品配套的需要,我們研製了該裝置並成功地得以應用。
輸入功率(kW):400;輸入轉速(r/min):2500-3000;傳動比:18;輸出轉矩(N·m):25000;最大輸出轉矩(N·m):40000。
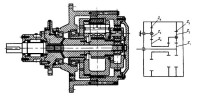
圖2 封閉式差動齒輪箱結椒劫及原理圖
圖2中,第二級行星輪軸與機座固定,兩級行星傳動的內齒圈與筒體連成一體,筒體隨內齒圈迴轉。第一級行星齒輪在驅動內齒輪Z迴轉的同時,還驅動第二級太陽輪,進而通過Z驅動Z迴轉。因此筒體上的驅動力矩實際為兩級行星傳動的內齒圈上驅動力矩的合成力矩。由於該齒輪箱結構獨特,使得較一般齒輪箱有更大的輸出力矩、更高的承載能力。
該封閉式差動齒輪箱的傳動比由下式計算:
當不考慮齒輪嚙合功率損失,經推導得出第一級及第二級行星傳動內齒輪的輸出力矩為:
其中為齒輪箱的輸人力矩,可由電機或液壓馬達提供。為齒輪箱的輸出力矩。
由上式可知, ,即第二級內齒輪傳遞的輸出力矩較大,因此設計中應特別注意第二級傳動的齒輪強度。
對該系統結構進行分析,表明該封閉系統不存在循環功率,因而有較高的傳動效率,可適用於大功率的動力傳遞。
封閉式差動齒輪箱由於結構十分緊湊,傳遞功率大,因而設計開發中應審慎行事。重點解決下述問題:
(1)由於筒體徑向尺寸受到嚴格限制,最大迴轉直徑要求不超過60 mm,因而設計時對齒輪的精度和材質提出了較高的要求。其中太陽輪、行星輪精度為6級,且均採用優質CrNi鋼,滲碳,淬火及磨削處理,且內齒輪直接成為輸出筒體的一部分,保證了徑向尺寸。
(2)為充分保證行星齒輪傳動功能的正常發揮,其無載設計十分重要。本次設計中採用了太陽輪和行星輪均浮動的方法,充分保證了均載效果。由於第一級太陽輪是一根細長線,與輸入軸花鍵連接,更進一步改善了太陽輪的均載性能。
(3)由於結構尺寸的限制,為保證行星輪軸承的壽命,全部行星輪軸承均採用密排滾子軸承,不僅滿足了徑向尺寸要求,而且也大大提高了使用壽命。為滿足該產品的需要,我們專門開發了專用軸承。
(4)齒輪箱採用齒輪油飛濺潤滑,為保證箱體內各齒輪、軸承潤滑充分,細部結構上也進行了特殊處理。
(5)齒輪強度設計中,充分考慮了工程機械產品的使用特點,如載荷波動較大,工作條件惡劣,溫度變化範圍大等,故應使齒輪有足夠的彎曲強度、適宜的接觸溫度,保證安全可靠運行。

基本信息
- 中文名
- 差動齒輪
- 外文名
- Differential gear
- 出處
- 機械
- 用途
- 控制航空微型機器人的飛行