坦克火控系統
坦克火控系統
坦克火控系統是控制坦克武器(主要是火炮)瞄準和發射的系統,用以縮短射擊反應時間,提高首發命中率。按瞄準控制方式分類,現代坦克火控系統可分為擾動式、非擾動式和指揮儀式3類。
坦克火控系統從問世到現在,大體上可以分為4代。第一次世界大戰末期裝備的第一代坦克火控系統只配有簡單的光學瞄準鏡。這種光學瞄準鏡用視距法測距,即如果目標的高度或寬度已知,那麼就可通過它在瞄準鏡視場中所佔的mrad分划數估算出或直接讀出目標距離,接著就可裝定瞄準角。用這種方法,在900m時,則命中率顯著下降。目前,一些坦克的應急工作方式仍然採用這種方法。
50年代裝備的第二代坦克火控系統在原光學瞄準鏡的基礎上增配了體視式或合像式測距儀和以凸輪等為函數部件的機械式彈道計算機,性能比第一代有了明顯改進,在1300m距離內,射擊標準目標的首發命中率為50%。
60年代初期裝備的第三代坦克火控系統由光學瞄準鏡、光學測距儀和機電模擬式彈道計算機組成,並且開始配用了一些彈道修正感測器。這種火控系統在1400m的距離內原地對固定目標的首發命中率為50%。
上述3代坦克火控系統的缺點是不能預測運動目標的射擊提前角,因此不能射擊運動目標,而且由於沒有一種比較理想的測距儀器,命中率比較低。隨著激光技術的出現和發展,出現了激光測距儀。激光測距儀是一種精度高、操作簡易、快速的測距儀器,與火控計算機等組合成的火控系統是提高坦克火炮命中率的重要途徑。因此,美國休斯飛機公司(Hughes Aircraft Co.)從1965年底,試驗用的樣機研製成功,定名為柯貝達(Cobelda),後來改名為薩布卡(SABCA)。休斯飛機公司根據從該火控系統中所獲得的經驗,正式為M60A3坦克設計了帶激光測距儀的綜合火控系統,主要由測瞄合一的車長激光測距瞄準鏡、炮長晝夜瞄準鏡、數模混合式火控計算機、目標角速度測量裝置以及各種彈道修正量感測器組成,能在坦克短停時射擊固定或運動目標。自動輸入火控計算機的修正量有炮耳軸傾斜、橫風和目標角速度,人工裝定的修正量有氣壓、氣溫、葯溫、炮膛磨損和彈種等。在2000m的距離內,原地對固定目標射擊時火控系統的首發命中率為90%。
進入70年代后,世界各國都相當重視坦克火控系統的現代化。不少國家研製成功並裝備了綜合坦克火控系統。
最近10多年來新發展的坦克火控系統,一部分是為了改裝現裝備的老式坦克而設計的,一部分是為新研製的坦克而設計的。儘管這些新發展的火控系統在總體結構、瞄準控制方式和性能數據上各有差異,但是所採用的技術卻有許多共同或相似之處,反映了坦克火控系統的發展動向。
如下:
快速發現、捕獲和識別目標;
反應時間短;
遠距離射擊首發命中率高;
坦克行進間能射擊固定或運動目標;
全天候和夜間作戰能力強;
操作簡便,可靠性高;
配有自檢系統,維修簡便;
具有較高的效費比。
對改裝老式坦克用的火控系統的基本要求如下:
在與老式坦克性能相匹配的前提下,基本上滿足現代先進坦克火控系統的某些要求;
安裝簡單迅速,通用性好,既適用於西方國家製造的老式坦克,也適用於蘇制T系列坦克;
坦克改動量小,改裝成本低;
可靠性高,操作和維護簡便;
功耗低,盡量利用車輛上原有的電源;
體積小,不過多地佔用坦克炮塔內的有效空間。
現代坦克火控系統一般由光電觀瞄設備、火控計算機、彈道修正量感測器以及火炮穩定和控制系統等組成。
光電觀瞄設備
現代坦克火控系統的光電鳳瞄設備通常包括晝用光學瞄準鏡和夜視儀器。對一個完善的坦克火控系統來說,車長和炮長都單獨配有光學主瞄準鏡和輔助瞄準鏡。炮長主瞄準鏡採用望遠式或潛望式兩種結構,基本上都與激光測距儀和夜高儀器組合,構成測瞄合一或晝夜合一的結構,目前日益增多的觀瞄設備為晝、夜、測距三合一結構。車長主瞄準鏡多用周視潛望式結構。為了提高搜索、識別和跟蹤目標的能力,車長和炮長主瞄準鏡通常採用變倍物鏡和大口徑物鏡。低倍率、大視場用於戰場監視和搜索目標;高倍率、小視場用於識別、跟蹤和瞄準目標。
為了提高瞄準精度和操作簡便,現代坦克火控系統的車長和炮長瞄準鏡還配用了陰極射線管和其他電子裝置,能將彈道瞄準標記、激光測距儀測得的距離數據以及准直調整。
70年代以前,坦克夜視儀器通常採用主動紅外裝置,隱蔽性不好,容易被敵方發現,成為攻擊的目標。70年代以來採用了微光夜視儀(包括一代和二代像增強器)和微光電視。在星光條件下,兩者對坦克的作用距離都可達到1000m以上。80年代初,第一代被動熱像儀開始裝備在如M60A3、M1和豹2等坦克上。微光夜視儀在無月光、星光夜晚的作用距離受到限制,並受煙霧影響,還不能發現偽裝目標。熱像儀除了克服微光夜視儀的上述缺點外,還有可能根據目標的熱特徵而實現自動跟蹤目標。目前大多數熱像儀所用的探測器材料為碲鎘汞,工作波段為8~14μm,對坦克的識別距離可達2000m以上。例如安裝在比利時LRS-5型坦克火控系統中的TTS型坦克熱像儀,對坦克的發現距離是4~5km,對坦克的識別距離是2~2.3km。
火控計算機
火控計算機是現代坦克火控系統的核心部件,主要功能是根據彈道修正量感測器自動輸入的和人工裝定的各種彈道參數,求解彈道和射擊提前角方程,並自動將射角和方位角信息傳送給瞄準鏡以及火炮伺服系統。火控計算機從問世至今,大體上有機械模擬、機電模擬、全電子模擬、數模混合式和數字式5種類型。現代坦克火控系統除少數採用模擬式和數模混合式外,大部分採用數字機,而這些數字機中大多數是微型計算機。由於坦克內的空間有限,要求整個火控系統的體積小、功耗低,因而使用微型計算機非常合適。採用微型機可使火控系統實現模塊化、可靠性高、便於快速檢修,微型機的成本也比較低。由於以上這些優點,目前採用微型機的火控系統很多,而且會越來越多。
現代坦克火控系統一般至少可計算4個彈種的射擊諸元,最大計算距離一般為4000m彈道計算精度一般為0.1mrad①,用脫殼穿甲彈對距離1500m、2.3×2.3(m)的運動目標射擊,能使首發命中率達到80%以上。
彈道修正感測器
為了提高彈道計算精度和首發命中率,現代坦克火控系統除用測距儀測距外,還採用了目標角速度、炮耳軸傾斜、橫風、彈種、定起角、炮口偏移、彈丸偏流、視差、氣溫、氣壓、炮膛磨損、葯溫等修正量。從理論上講,配用的修正量感測器越多,自動化程度越高,命中率也越高,但隨之成本增高,發生故障或遭到損壞的可能性增大。因此不一定感測器越多越好,譬如第一批豹2上裝有很多修正量自動感測器,而第二批豹2坦克上不再安裝氣象感測器,氣溫、氣壓、葯溫由人工裝定。
現代坦克火控系統所配用的自動修正量感測器大體有3種情況。
第一種情況是配有一、二種自動感測器,如日本74式坦克火控系統只配有距離感測器(激光測距儀),其他如葯溫、炮耳軸傾斜、炮膛磨損、視差等彈道修正量都是手動輸入。
第二種情況是配有許多自動修正量感測器。如比利時薩布卡坦克火控系統,除彈種手動輸入外,配有距離、目標角速度、炮耳軸傾斜、橫風、氣壓、氣溫、葯溫等多種自動感測器。聯邦德國的綜合坦克火控系統和萊姆斯塔(LEMSTAR)坦克火控系統除人工輸入彈種、炮膛磨損外,配有距離、目標角速度、炮耳軸傾斜、橫風、氣溫、氣壓、葯溫等多種感測器。
第三種情況是配有距離、目標運動角速度、炮耳軸傾斜,或再加上橫風感測器,其他修正量由人工輸入,屬於這種情況的火控系統數量最多,如美國的M60A3、M1、英國的IFCS等。它的優點是系統不太複雜、成本不太高,但又反一些最重要的和隨時可變、不便於手動輸入的修正量用自動感測器輸入,而葯溫、氣溫、氣壓和炮膛磨損等在作戰前有充分的時間預先人工輸入。即使系統不過於複雜,又保證了首發命中率高的要求。
激光測距儀是現代坦克火控系統的一種最好的距離感測器。它的測距精度高,而且與測程的遠近無關;測距迅速;距離數據可以直接以數字顯示並傳送給火控計算機;激光的光束窄,因而角解析度高,不易受地物雜波的影響和對方的干擾;激光測距儀的體積小、重量輕;操作和訓練簡便。這些獨特的優點極好地滿足了現代坦克火控系統對距離感測器的要求,成為組成現代坦克火控系統必不可少的部件。多次的實際射擊試驗也證明,坦克火控系統配用激光測距儀后,首發命中率可提高到80%以上。特別是遠距離射擊時,首發命中率的提高更顯著。
坦克激光測距儀從問世到現在已經發展了兩代。目前正在發展第三代——CO2激光測距儀。現代坦克火控系統除少數還裝備第一代——紅寶石激光測距儀,如美國M60A3坦克和日本74式坦克,其他絕大多數都裝備了第二代——釹激光測距儀,其中多數用Nd:YAG激光器,少數用釹玻璃激光器。與紅寶石激光測距儀相比,釹激光測距儀的優點是發射1.06μm的近紅外光,隱蔽性好,其他優點還有耗電少、效率高、輕小等。激光測距儀的測程約為200~10000m,測距精度約為±5m或±10m,束散為0.5~1mrad,脈衝重複頻率為每分種幾次到幾十次。
激光測距儀除極少數因改裝老式坦克需要而採取測瞄分離的結構之外,絕大多數都與炮長主瞄準鏡或車長主瞄準鏡組合成一體,構成測瞄合一的結構。
抑制假目標回波是激光測距儀中一項重要的技術問題,關係到測距數據是否可靠,從而直接關係到首發命中率的問題。現採用以下方法抑制假目標回波:
用距離選通法抑制最小選通距離以內的假目標,最小選通距離由操作手裝定;
存儲並顯示多個目標距離數據,供炮長或車長進行判斷選擇;
用首末脈衝距離邏輯電路抑制假目標回波;
偏振分辨法,即利用目標反射光與微粒(如煙、霧)散射光偏振性能不同來抑制假目標回波,這種方法要求激光器輸出平面偏振光,並且在接收器前要加檢偏器。
除上述方法外,有的坦克激光測距儀還採用一些輔助方法來驗證激光測距儀所測距離是否正確,如英國ICS火控系統中所用的激光測距瞄準鏡用大小與距離成反比的橢圓瞄準光環來驗證所測距離是否是目標的距離。
現代坦克火控系統常用的目標角速度測量裝置主要有速度陀螺、測速電機和光電編碼器3種,只要測出瞄準鏡或火炮跟蹤目標的角速度就測出了目標的角速度。瞄準鏡上安裝的速度陀螺是瞄準鏡穩定系統的一個部件,此外還兼作目標角速度感測器。
常用的炮耳軸傾斜感測器有擺式和垂直陀螺等。垂直陀螺適用於行進間測量炮耳軸傾斜,比較先進的坦克火控系統(如豹2和比利時的通用坦克火控系統)一般採用這種裝置。
橫風感測器有被電流加熱的熱敏電阻式、螺旋槳式和球式幾種。
炮膛磨損修正量採用數字邏輯電路,其原理是將每種彈等效的磨損係數與已發射過的每種彈的數量的乘積累加起來,就形成了炮膛的等效總磨損量。炮膛磨損也可人工裝定。
瞄準線穩定與伺服系統
現代戰爭要求坦克具有行進間射擊或行進間短停射擊目標的能力,這就必須配備火炮穩定和瞄準線穩定系統。穩定系統的發展大體上經歷了3代。前兩代穩定系統主穩定火炮,瞄準線隨動於火炮。
第一代穩定系統叫做雙陀螺穩定系統,在高低和方位穩定系統中每套只有1個速度陀螺,用來感測火炮和炮塔的角速度,此信號經放大後來控制火炮伺服系統,起到穩定火炮的作用。這種穩定系統可以在行進間粗略穩定火炮,但不能行進間射擊,要求射擊前短停精確控制火炮。
第二代穩定系統又稱為4陀螺穩定系統。即在火炮高低和方位伺服控制迴路中各包括兩個陀螺。一般來說,一個是位置陀螺(3自由度陀螺),一個是速度陀螺(2自由度陀螺)。速度陀螺在有的系統中提供擾動變數前饋控制信號(如豹1A3),有的起速度反饋作用(如T-62坦克)。第二代系統比第一代系統反應迅速、穩定精度高,火炮能在行進間瞄準,射擊前短停的時間比第一代可縮短一些,但仍不能行進間射擊。
第三代穩定系統是獨立穩定瞄準線的指揮儀式系統。這種系統與瞄準控制方式中的指揮儀式坦克火控系統系同一種系統。
穩定系統也伺服控制系統是緊密結合在一起的,兩者的大部分部件都是共用的。目前穩定和伺服控制系統有電液式和電動式兩種類型。美國、聯邦德國和法國裝備的坦克基本上都是電液式的,而英國的是電動式的,蘇聯坦克穩定器在高低向是電液式的,方位向是電動式的。美國卡迪拉克·蓋奇(Cadillac Gage)公司生產的電液式穩定系統為美國M47、M48、M60坦克以及聯邦德國和比利時裝備的豹1坦克所採用。英國的炮控穩定系統都是全電動式的,而且都由馬可尼雷達(Marconi Radar)公司生產,包括用於奇伏坦坦克的GCENo.7雙向穩定系統,用於改裝遜邱倫的GCE576或GCE581系統以及用於維克斯MK3坦克的GCE620炮控穩定系統,這些系統的末級功率放大裝置都是電機放大機。馬可尼雷達公司又為蠍式、狐式等輕型坦克研製成功了PD700型炮塔和火炮電力驅動系統,採用可控硅功率放大器作為末級功率放大器,優點是快速迴轉和慢速平滑跟蹤性能優良、效率高、耗電少、工作時雜訊小。
近年來,採用全電動系統的坦克越來越多,如法國的AMX勒克萊爾、日本的90式、以色列的梅卡瓦3、巴西的EE-T1等,聯邦德國的下一代主戰坦克KPz2000也打算採用。全電動系統的主要優點是安全性好(無液壓油,不易著火)。
瞄準線穩定和控制系統採用的是小功率電氣伺服控制系統。
坦克火控系統大體採用擾動式、非擾動式和指揮儀式3種瞄準控制方式。採用擾動式的主要有英國的IFCS、SFCS600火控系統和美國的M60A3、日本的74式坦克火控系統等。採用非擾動式火控系統的如瑞典的IKV-91坦克火控系統、E型坦克火控系統、比利時的薩布卡火控系統、聯邦德國的綜合坦克火控系統等。指揮儀式火控系統在美國的M1、聯邦德國的豹2、日本的90式、法國的勒克萊爾、義大利的C1、以色列的梅卡瓦3型等坦克上得到廣泛應用。
擾動式
在擾動式火控系統中,瞄準鏡與火炮用平行四邊形(也稱四聯桿)機構連接,瞄準線和炮軸線是平行的。當炮長用手控裝置調轉火炮時瞄準鏡就隨動於火炮,因此炮長可以通過瞄準鏡捕獲和跟蹤目標,並且在跟蹤過程中測定目標距離和角速度。火控計算機根據輸入的目標距離、角速度、傾斜角和各種彈道修正量,計算出射擊提前角,然後將信號傳輸給瞄準線偏移裝置,使瞄準線產生偏移。其偏移量相應於射擊提前角,偏移方向和火炮運動方向相反。當炮長發現瞄準線偏離目標后,就用手控裝置調轉火炮使偏離的瞄準線重新對準目標。這時火炮就調轉到提前位置上,可以進行射擊。這個從“偏移”到“重新對準”的過程,叫做擾動過程。這種瞄準控制方式稱為擾動式。
擾動式火控系統又分為擾動式手動調炮和擾動式自動調炮兩種。在擾動式手動調炮的火控系統中,火控計算機算出的射擊提前角只傳輸給瞄準鏡,不傳輸給火炮。炮長需要用手控制裝置調轉火炮,使彈道瞄準標記重新壓住目標。在擾動式自動調炮的火控系統中,火控計算機算出的射擊提前角不但傳輸給瞄準鏡,而且通過按壓自動瞄準開關同時傳輸給火炮。擾動手動調炮的典型例子是英國的SFCS600火控系統,擾動式自動調炮的典型例子是英國的IFCS火控系統。
擾動式火控系統的主要優點是結構簡單,成本低,比較適合於改裝老式坦克;缺點是系統反應時間較長、容易產生滯后,操作難度與大一些。但是這些缺點在擾動式自動調炮火控系統中都得到不同程度的克服。
非擾動式
在非擾動式火控系統中,火控計算機算出的射擊提前角同時傳輸給瞄準鏡和火炮傳動裝置,使火炮自動調轉到提前位置上,而瞄準鏡傳動裝置則控制瞄準鏡朝相反方向轉動同樣的角度。由於瞄準線和炮軸線同時受射擊提前角信號控制,朝相反方向移動,所以瞄準線和目標之間的相對運動速度等於零,這樣瞄準線就能始終保持對準目標,看不出擾動的過程。非擾動式火控系統的主要優點是結構不太複雜、系統反應速度快和跟蹤平穩性好。
擾動式和非擾動式火控系統的共同缺點是由於瞄準線沒有獨立穩定,即使火炮穩定了,但由於火炮質量大,難於達到很高的穩定精度;由於火炮和瞄準鏡機械連接,火炮的不穩定因素容易影響瞄準線的瞄準精度,使火控系統的動態精度受影響,因而使這兩種火控系統不能完全滿足進行間射擊的要求,僅適於短停射擊。
指揮儀式
為了提高行進間射擊精度,近年來研製的新型主戰坦克多數採用指揮儀式火控系統。它的基本特點是瞄準鏡與火炮分開安裝,火炮和瞄準鏡都是獨立穩定的。炮長用手控裝置驅動瞄準鏡,使瞄準線始終保持對準目標。火炮不是由炮長驅,而是通過自同步機(或旋轉變壓器)及火炮伺服系統隨動於瞄準線。火控計算機所算出的射擊提前角不傳輸給瞄準鏡傳動裝置,只傳輸給火炮和炮塔伺服系統。這樣火炮就可調轉到提前位置上,而瞄準鏡仍然保持跟蹤目標。指揮儀式坦克火控系統通常配有火炮允許射擊電路,當火炮調轉到提前位置上時該電路向炮長顯示火炮已經到位,可以實施射擊。
指揮儀式坦克火控系統大體上有以下3種類型:(1)炮長和車長瞄準鏡都配有獨立的雙向穩定裝置;火炮也配有雙向穩定裝置,既可隨動於炮長瞄準鏡又可隨動於車長瞄準鏡,如豹2坦克火控系統。(2)炮長瞄準鏡獨立穩定,車長瞄準鏡不配穩定裝置,火炮只能隨動於炮長瞄準鏡而不能隨動於車長瞄準鏡,如美國M1坦克火控系統。(3)僅獨立穩定車長主瞄準鏡,炮長主瞄準鏡不穩定。火炮只能隨動於車長瞄準鏡,不能隨動於炮長瞄準鏡,如英國的AFCS火控系統和法國柯斯達克坦克火控系統。
指揮儀式火控系統的優點是系統反應時間短、行進間射擊精度高和操作比較容易。缺點是結構複雜、成本高。
聯邦德國的豹2坦克火控系統是目前已裝備的最完善的火控系統,現將各國已裝備、即將裝備或已研製成功的比較先進的坦克火控系統與豹2坦克火控系統進行比較(見下頁表)。
從該表可以看出,法國勒克萊爾坦克火控系統、義大利OG14L3坦克火控系統(裝備於C1坦克)和豹2坦克火控系統所採用的主要技術是很近似的,都採用了已成熟的目前所能達到的最先進的技術。勒克萊爾還採用了上表所列以外的一些新技術,例如火控系統由共用1條數據匯流排的多微處理機系統來控制並進行檢測。另外,還準備在首批200輛坦克生產之後採用一些改進措施,如全天候目標自動跟蹤器、激光報警器、激光風速儀、話間操作控制器等。
為了降低成本,美國的M1坦克炮長瞄準鏡只在高低向獨立穩定,方位向不穩定,而且車長不單獨配用瞄準鏡,車長瞄準鏡是炮長主瞄準鏡的光學延伸,由於採取了這些措施和其他一些降低成本的措施,使M1坦克火控系統的成本實際降低到坦克總成本的20%,比原來規定的23%還要少。但性能上也受到一些影響,實驗表明:M1坦克的射擊精度比豹2坦克的稍差。
所列的其他坦克火控系統也主要從降低成本考慮,車長瞄準鏡不進行雙向獨立穩定。
比較坦克火控系統所配用的夜視儀器可以看出,有些國家如中國、蘇聯、瑞典等國的火控系統配有微光夜視儀,未配備熱像儀。如上所述,熱像儀比微光夜視儀具有較多的優點,所以用熱像儀來取代微光夜視儀將是這些火控系統有待改進的一個方面。英國的挑戰者坦克炮長瞄準鏡不獨立穩定,因此它採用的瞄準控制方式是擾動式(自動調炮)的。其反應時間比指揮儀式的要長一些。
坦克火控系統的發展趨勢如下:
測距儀
現在大多數國家的坦克火控系統都採用了Nd:YAG激光測距儀。今後的發展方向是發射10.6μm波長激光的CO2激光測距儀。這種測距儀具有對人眼的安全性好、穿透戰場煙霧能力強、與工作在8~14μm波段的熱像儀具有很好的兼容性等優點。因此,目前很多國家都很重視對它的研究,估計90年代將有可能將CO2激光測距儀裝備到坦克上。
現在坦克火控系統中還出現了一種新的激光測距儀,這就是在聯邦德國的MOLF坦克火控系統中已採用的喇曼(Raman)頻移Nd:YAG激光測距儀。它是豹2坦克現用的CE628型激光測距儀的進一步發展,在原來的Nd:YAG激光器中加了1個喇曼頻移盒,利用喇曼效應,激光器的波長由1.06μm頻移到1.5μm,這種波長的激光不會損傷人的眼睛。
光電觀瞄設備
在好天候條件下,將繼續使用光學瞄準鏡搜索和跟蹤目標。夜間觀瞄裝置採用熱像儀的越來越多。熱像儀在性能上比像增強技術好,有些原裝備微光夜視儀的火控系統也紛紛用熱像儀進行改裝。目前有些國家已著手研製第二代凝視焦平面陣列熱像儀。
還有一種獨特的夜視設備就是帶熱點探測器的微光電視,熱點探測器將探測到的目標位置以紅色閃爍光點準確地指示出來,并迭加到微光圖像上。由於有熱點探測器,因此不論環境照明條件如何,可以發現遠距離的目標和低對比度及偽裝的目標。而且由於使用了微光電視,因此在識別目標時有較高的解析度。
為了提高坦克在夜間、雨、雪、濃霧和深煙條件下的全天候作戰能力,發現目標並向火控計算機提供可靠的目標位置數據,並便於實現自動跟蹤,未來有些坦克火控系統將可能採用毫米波雷達。美國已研製了斯塔特爾(ATSRTLE)坦克火控系統,採用了頻率為94GHz的毫米波雷達,並裝在M60A3坦克上進行了試驗。
火控計算機
80年代新裝備的坦克火控系統幾乎一致地都採用數式火控計算機,而且絕大多數是微處理機。隨著計算機軟、硬體技術的不斷發展,微處理機系統的成本不斷降低,在坦克內採用共用匯流排的多微處理機系統是一種發展趨勢。在這種系統中,通過數據匯流排,坦克乘員能獲得坦克所有子系統的數據。例如,車長可象駕駛員一樣方便地知道燃料箱里還剩下多少燃料,他還能立刻知道自動裝彈機中所剩下的彈數和目前坦克在什麼地方等等。車輛系統中各部件的工作和測試也都由多微處理機系統控制和管理。這種系統結構的另一個優點是可以提高系統的可靠性,當一台微處理機發生故障時,系統可以重新編排結構,工作正常的微處理機可以代替有故障的微處理機的工作。
彈道修正感測器
近年來除了如目標角速度、炮耳軸傾斜、氣溫、氣壓等傳統的彈道感測器仍在繼續發展外,還出現了一些新的彈道修正感測器。
國外近斯發現坦克炮射擊的重要誤差來源是炮口的運動,炮口運動是由火炮的快速連續射擊及環境條件的改變所引起的。根據美國所作的實驗表明,安裝炮口校正裝置,可將炮口偏移誤差從幾mrad,降至0.1mrad,從而大大提高火炮的射擊精度。美國已研製成精度為±0.03~0.1mrad,頻率響應為5kHz的炮口校正系統。法國第三代坦克勒克萊爾也將採用炮口校正裝置。
美國陸軍目前正在進行激光測量風速的研究工作,已研製出了小型化的實驗裝置。激光器發射單頻激光,激光遇到風載微粒向後散射,產生多普勒頻移信號,利用外差探測法進行檢測,從而測出風速。法國的勒克萊爾坦克也將採用激光風速儀。
為了充分發揮採用微處理機的數字式火控系統的優點,正在發展一些新的數字式彈道自動修正感測器,這樣可以省掉一些模數轉換裝置,從而降低火控系統的複雜性和成本。
瞄準控制方式
由於指揮儀式火控系統具有行進間射擊精度高,反應時間短,操作比較容易等優點,各國比較先進的新型坦克多數採用這種瞄準控制方式。預計在今後相當一段時間內,指揮儀式火控系統仍然是各國發展新坦克火控系統的主流。與此相適應,則發展高精度的穩定系統,如法國勒克萊爾的炮長主瞄準鏡的穩定精度達到0.05mrad。
自動跟蹤技術
自動跟蹤技術可以減輕炮長的工作負擔,縮短系統的反應時間,消除車體不穩定和人工跟蹤不穩定所帶來的誤差,提高跟蹤精度。因此也是今後坦克火控系統發展的熱門課題之一,實現自動跟蹤可藉助於毫米波雷達、激光雷達、電視自動跟蹤和熱成像自動跟蹤等技術。
火控系統從問世到現在,大體上可以分為四代。
第二次世界大戰末期裝備的第一代坦克火控系統只配有簡單的光學瞄準鏡。這種光學瞄準鏡用視距法測距,即如果目標的高度或寬度已知,那麼就可通過它在瞄準鏡視場中所佔的分划數估算出或直接讀出目標的距離。這種火控系統在900米內,原地對固定目標的首發命中率為50%。
由於用視距法測距,當距離超過900米時坦克的命中率會顯著下降,因此,20世紀50年代裝備的第二代坦克火控系統在原光學瞄準鏡的基礎上增配了體視式或合像式測距機和以凸輪等為函數部件的機械式彈道計算機,性能比第一代有了明顯提高,在1300米距離內射擊標準目標的首發命中率為50%。
20世紀60年代初期裝備的第三代坦克火控系統由光學瞄準鏡、光學測距機和機電模擬式彈道計算機組成,並開始配用了一些彈道修正感測器。這種火控系統在1400米的距離內原地對固定目標的首發命中率為50%。美國在M60A1坦克上率先使用了這種火控系統。
進入20世紀70年代后,世界各國都相當重視坦克火控系統的現代化。20世紀90年代出現的主戰坦克,其火控系統不僅採用了數字式彈道計算機、敵我識別系統、目標自動瞄準和跟蹤系統,而且還採用了戰場戰鬥管理系統等。這樣,敵方的狀況、射擊的數據、我方的情報等,不僅是一輛坦克內的所有乘員,而且同一部隊的坦克之間都能共享。因此,不光是一輛坦克,而且整個部隊的情報能力都有一個劃時代的飛躍。這些火控系統已具備了第五代的特徵。
下面以研祥的嵌入式智能平台為基礎講述嵌入式智能平台在火控系統中的應用
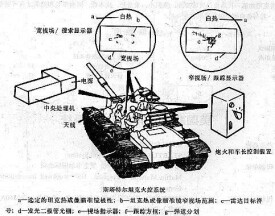
該火控系統是為國產某式主戰坦克研製的新型火控系統。該系統與車長的晝/夜潛望鏡有一個介面,使得車長能超越炮長進行控制或迴轉炮塔以對付不同的目標。
觀瞄設備
觀瞄設備包括晝、夜、測距三合一的穩定視場的瞄準鏡,包括主瞄準鏡、激光發射腔、激光電源和計數器、1×潛望進鏡和微光瞄準鏡。它的功能是觀察戰場、瞄準和跟蹤目標;確定目標距離;確定目標高低和方位角速度。
它的特點有:
1.通過直接穩定視場的方法使炮長能清楚地觀察戰場,容易瞄準,跟蹤平穩並能可靠地測量距離。
2.微光瞄準鏡、1×潛望鏡、激光發射腔等通過積木式設計方法與主瞄準鏡連接,這樣互換性好而且維修方便。
3.激光測距儀使用首/末脈衝邏輯技術,以便抑制假目標。
彈道計算機
彈道計算機包括研祥產ESM-5510CLD計算機主體、控制面板和步進電機驅動器。
它的功能是:根據所選擇的彈咱、目標距離、所有自動感測器的輸出和手動裝定的參數,計算武器的射角和方位提前角;顯示所有的輸入信號、中間結果和輸出的射擊諸元;自檢;當火控系統處於分划自動裝定工作方式時,瞄準鏡分划由步進電機驅動器通過步進電機自動裝定。
它的技術特點有:武器射擊諸元用循環計算方式計算,以便提高首發命中率;由於採用大規模集成電路,彈道計算機的結構簡單、性能穩定而且工作可靠;用一個射擊中斷開關來快速檢查彈丸脫靶的原因。
修正量感測器
目標高低和方位角速度感測器包含在瞄準鏡中。傾斜感測器(垂直陀螺)用來測量炮耳軸的靜態和動態傾斜角。葉片式的橫風感測器(可任選)用來測量炮塔所處位置的橫風。炮塔角速度感測器(測速發電機式)用來測量在自動裝定分划工作方式時的目標方位角速度。
火炮雙向穩定器
火炮雙向穩定器包括執行電機、陀螺儀組、轉換器、角度限制器、電磁離合器、自動鎖定裝置、控制台、測速發電機、電機放大機、放大器、配電箱、車體陀螺、炮塔陀螺、輔助油箱、液力增壓器和液壓動力缸。
火炮雙向穩定器的功能是:當坦克運動時穩定火炮,並提供火炮射擊的機會;炮長或車長可用它來驅動火炮,並在射擊前使火炮自動瞄準。
火炮雙向穩定器的技術特點是:通過使用複合控制和穩定的原理,使火炮雙向穩定器呈現出良好的火炮跟蹤性能和高的穩定精度;由於使用了先進的部件和控制方法,該火炮雙向穩定器有良好的低速性能,並具有在傾斜的坦克上迴轉火炮的能力。
控制設備
控制設備的功能是:對視場穩定的測距瞄準鏡、彈道計算機和火炮雙向穩定器之間進行電連接,綜合併處理所有的控制信號;形成火炮允許射擊信號;強迫火炮進入允許射擊門;顯示火控系統工作方式並輔助進行火炮與瞄準線准直調整。
該火控系統的方塊圖如圖所示。
該火控系統有穩像式工作方式和自動裝定分划工作方式兩種。
(一)穩像式工作方式
炮長控制工作台以便驅動瞄準線。瞄準鏡的位置信號輸入給火炮雙向穩定器,火炮的位置信號反饋回來與瞄準鏡的位置信號比較形成一個閉環,於是火炮跟隨瞄準線運動。
當目標已被瞄準並已測量了它的距離后,彈道計算機根據下列數據循環計算武器的射擊諸元,這些數據是來自自動感測器的距離、目標相對角速度、炮耳軸傾斜、橫風數據以及人工裝定的彈種、葯溫、氣溫、初速數據。計算好的射擊諸元與火炮位置信號進行綜合。綜合后的信號輸入到火炮雙向穩定器,通過控制火炮來自動控制火炮的射角和方位提前角。當火炮到達預定位置時,控制設備產生允許火炮射擊信號並將其傳送到火炮射擊電路。如果此時炮長按下發射按鈕,則火炮就可立即射擊。
(二)自動裝定分划方式
此時,鎖定穩像陀螺,於是視場不再穩定。炮塔角速度感測器產生目標的方位角速度信號。當瞄準目標並測定距離后,計算機只計算一次併產生射擊諸元信號,這些信號通過步進電機驅動器自動裝定瞄準鏡中的環形分划。當用環形分划再次瞄準目標后,炮長就可開火。
該火控系統的特點有:瞄準鏡獨立穩定,具有較高的穩定精度,以便在坦克行進中由炮長觀察、瞄準、跟蹤目標並測定目標的距離及目標相對運動角速度;配有允許射擊門(即符合門)使系統能自動找準確的開火時機;在戰鬥環境中,由於射擊條件隨時都可改變,彈道計算機能循環計算併產生新的射擊諸元,不斷提供給火炮,可以提高首發命中率;自動裝定射角和方位提前角而不擾動瞄準線,火控系統操作簡單,反應時間短,從發現目標到開火大約只需6s;炮長1×潛望鏡與微光瞄準鏡可互換;系統配有目標方位角速度、目標高低角速度、炮耳軸傾斜、橫風4種自動感測器和葯溫、氣溫、初速、手動裝定橫風、手動裝定距離以及在方位向和高低向的綜合修正6種手動裝定參數,還可選擇多種彈種;火控系統可與原坦克的車長晝/夜潛望式瞄準鏡介面,此時車長可以超越控制調轉火炮到作戰方向;火控系統是指揮儀式的,使得坦克能在行進中快速、準確地射擊運動目標。
基本信息
- 中文名
- 坦克火控系統
- 外文名
- Tank Fire Control System
- 用途
- 縮短射擊反應時間
- 定義
- 控制坦克武器瞄準和發射的系統
- 分類
- 擾動式、非擾動式和指揮儀式