棘輪機構
單向間歇運動機構
棘輪機構(ratchet and pawl),由棘輪和棘爪組成的一種單向間歇運動機構。棘輪機構常用在各種機床和自動機中間歇進給或迴轉工作台的轉位上,也常用在千斤頂上。在自行車中棘輪機構用於單向驅動,在手動絞車中棘輪機構常用以防止逆轉。棘輪機構工作時常伴有雜訊和振動,因此它的工作頻率不能過高。
棘輪機構將連續轉動或往複運動轉換成單向步進運動。
棘輪輪齒通常用單向齒,棘爪鉸接於搖桿上,當搖桿逆時針方向擺動時,驅動棘爪便插入棘輪齒以推動棘輪同向轉動;當搖桿順時針方向擺動時,棘爪在棘輪上滑過,棘輪停止轉動。為了確保棘輪不反轉,常在固定構件上加裝止逆棘爪。搖桿的往複擺動可由曲柄搖桿機構、齒輪機構和擺動油缸等實現,在傳遞很小動力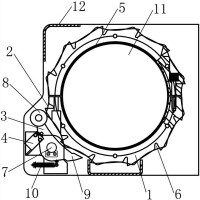 時,也有用電磁鐵直接驅動棘爪的。棘輪每次轉過的角度稱為動程。動程的大小可利用改變驅動機構的結構參數或遮齒罩的位置等方法調節,也可以在運轉過程中加以調節。如果希望調節的精度高於一個棘齒所對應的角度,可應用多棘爪棘輪機構。
時,也有用電磁鐵直接驅動棘爪的。棘輪每次轉過的角度稱為動程。動程的大小可利用改變驅動機構的結構參數或遮齒罩的位置等方法調節,也可以在運轉過程中加以調節。如果希望調節的精度高於一個棘齒所對應的角度,可應用多棘爪棘輪機構。
棘輪機構
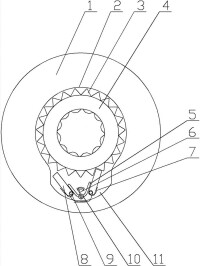
圖示為機械中常用的外嚙合式棘輪機構,它由主動擺桿,棘爪,棘輪、止回棘爪和機架組成。主動件空 套在與棘輪固連的從動軸上,並與驅動棘爪用轉動副相聯。當主動件逆時針方向擺動時,驅動棘爪便插入棘輪的齒槽中,使棘輪跟著轉過一定角度,此時,止回棘爪在棘輪的齒背上滑動。當主動件順時針方向轉動時,止回棘爪阻止棘輪發生順時針方向轉動,而驅動棘爪卻能夠在棘輪齒背上滑過,所以,這時棘輪靜止不動。因此,當主動件作連續的往複擺動時,棘輪作單向的間歇運動。
套在與棘輪固連的從動軸上,並與驅動棘爪用轉動副相聯。當主動件逆時針方向擺動時,驅動棘爪便插入棘輪的齒槽中,使棘輪跟著轉過一定角度,此時,止回棘爪在棘輪的齒背上滑動。當主動件順時針方向轉動時,止回棘爪阻止棘輪發生順時針方向轉動,而驅動棘爪卻能夠在棘輪齒背上滑過,所以,這時棘輪靜止不動。因此,當主動件作連續的往複擺動時,棘輪作單向的間歇運動。
棘輪機構
棘輪機構的分類方式有以下幾種: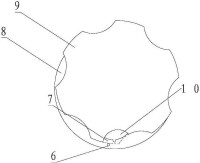
棘輪機構
按結構形式
棘輪機構按結構形式分類可分為齒式棘輪機構和摩擦式棘輪機構。
齒式棘輪機構結構簡單,製造方便;動與停的時間比可通過選擇合適的驅動機構實現。該機構的缺點是動程只能作有級調節;噪音、衝擊和磨損較大,故不宜用於高速。
棘輪機構
按嚙合方式
棘輪機構按嚙合方式分類可分為外嚙合棘輪機構和內嚙合棘輪機構。
外嚙合式棘輪機構的棘爪或楔塊均安裝在棘輪的外部,而內嚙合棘輪機構的棘爪或楔塊均在棘輪內部。
外嚙合式棘輪機構由於加工、安裝和維修方便,應用較廣。內嚙合棘輪機構的特點是結構緊湊,外形尺寸小。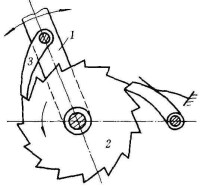
棘輪機構
按從動件運動形式
棘輪機構按從動件運動形式分類可分單動式棘輪機構、雙動式棘輪機構和雙向式棘輪機構。
單動式式棘輪機構當主動件按某一個方向擺動時,才能推動棘輪轉動。
雙動式棘輪機構,在主動搖桿向兩個方向往復擺動的過程中,分別帶動兩個棘爪,兩次推動棘輪轉動。
雙動式棘輪機構常用於載荷較大,棘輪尺寸受限,齒數較少,而主動擺桿的擺角小於棘輪齒距的場合。
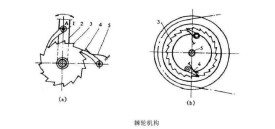
以上介紹的棘輪機構,都只能按一個方向作單向間歇運動。雙向式棘輪機構可通過改變棘爪的擺動方向,實現棘輪兩個方向的轉動。圖示為兩種雙向式棘輪機構的形式,雙向式棘輪機構必須採用對稱齒形。
 棘輪機構 |  棘輪機構 |
 棘輪機構 | 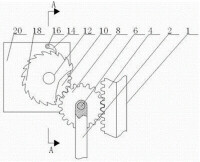 棘輪機構 |
棘輪機構的設計主要應考慮:棘輪齒形的選擇、模數齒數的確定、齒面傾斜角的確定、行程和動停比的調節方法
現以齒式棘輪機構為例,說明其設計方法齒形的選擇
圖示為常用齒形,不對稱梯形用於承受載荷較大的場合;當棘輪機構承受的載荷較小時,可採用三角形或圓弧形齒形;矩形和對稱梯形用於雙向式棘輪機構。
模數、齒數的確定
與齒輪相同,棘輪輪齒的有關尺寸也用模數m作為計算的基本參數,但棘輪的標準模數要按棘輪的頂圓直徑da來計算。
m = da/z
棘輪齒數z一般由棘輪機構的使用條件和運動要求選定。對於一般進給和分度所用的棘輪機構,可根據所要求的棘輪最小轉角來確定棘輪的齒數(z ≤250,一般取z = 8~30),然後選定模數。
齒面傾斜角的確定
棘輪齒面與徑向線所夾α稱為齒面傾斜角。棘爪軸心O1與輪齒頂點A的連線O1A與過A點的齒面法線nn的夾角β稱為棘爪軸心位置角。
為使棘爪在推動棘輪的過程中始終緊壓齒面滑向齒根部,應滿足棘齒對棘爪的法向反作用力N對O1軸的力矩大於摩擦力Ff沿齒面)對O1軸的力矩,即N·O1Asinβ > Ff·O1Acosβ
則 Ff/N < tanβ
因為 f = tanψ = Ff/N
所以 tanβ > tanψ
即 β >ψ
式中f和分別為棘爪與棘輪齒面間的摩擦係數和摩擦角,一般f取0.13 ~0.2。
行程和動停比調節
1)採用棘輪罩
通過改變棘輪罩的位置,使部分行程棘爪沿棘輪罩表面滑過,從而實現棘輪轉角大小的調整。
2)改變擺桿擺角
通過調節曲柄搖桿機構中曲柄的長度,改變搖桿擺角的大小,從而實現棘輪機構轉角大小的調整。
3)採用多爪棘輪機構
要使棘輪每次轉動的角度小於一個輪齒所對應的中心角γ時,可採用棘爪數為m的多爪棘輪機構。
如n=3的棘輪機構,三棘爪位置依次錯開γ/3 ,當擺桿轉角Ф1在γ≥Ф1≥γ/3 範圍內變化時,三棘爪依次落入齒槽,推動棘輪轉動相應角度Ф2為 γ≥Ф2≥γ/3 範圍內γ/3 整數倍。
棘輪機構的主要用途有:間歇送進、制動和超越等,以下是應用實例。
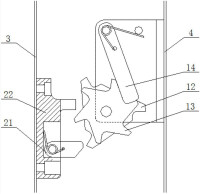
圖示為牛頭刨床,為了切削工件,刨刀需作連續往複直線運動,工作台作間歇移動。當曲柄1轉動時,經連桿2帶動搖桿5作往複擺動;搖桿5上裝有雙向棘輪機構的棘爪3,棘輪4與絲杠6固連,棘爪帶動棘輪作單方向間歇轉動,從而使螺母(即工作台)作間歇進給運動。若改變驅動棘爪的擺角,可以調節進給量;改變驅動棘爪的位置(繞自身軸線轉過180°后固定),可改變進給運動的方向。
圖示為槓桿控制的帶式制動器,制動輪與外棘輪2固結,棘爪3鉸接於制動輪4上A點,制動輪上圍繞著由槓桿5控制的鋼帶6。制動輪4按逆時針方向自由轉動,棘爪3在棘輪齒背上滑動,若該輪向相反方向轉動,則4輪被被制動。
圖示的棘輪機構可以用來實現快速超越運動。運動由蝸桿傳到蝸輪,通過安裝在蝸輪上的棘爪3驅動棘輪 固連的輸出軸5按圖示方向慢速轉動。當需要軸快速轉動時,可按輸出軸的方向快速轉動輸出軸上的手柄,這時由於手動轉速大於蝸輪轉速,所以棘爪在棘輪齒背滑過,從而在蝸輪繼續轉動時,可用快速手動來實現輸出軸超越蝸輪的運動。
固連的輸出軸5按圖示方向慢速轉動。當需要軸快速轉動時,可按輸出軸的方向快速轉動輸出軸上的手柄,這時由於手動轉速大於蝸輪轉速,所以棘爪在棘輪齒背滑過,從而在蝸輪繼續轉動時,可用快速手動來實現輸出軸超越蝸輪的運動。
棘輪機構
基本信息
- 中文名
- 棘輪機構
- 外文名
- ratchet and pawl
- 類型
- 單向間歇運動機構
- 組成
- 搖桿、棘爪和外棘輪