電傳操縱系統
電傳操縱系統
作為一種先進的電子飛行控制系統,工業上普遍將電傳操縱系統定義為一種利用反饋控制原理,將飛行器的運動作為受控參數的電子飛行控制系統。電傳操縱系統的可靠性比起傳統的機械式飛行控制系統要可靠很多系統的能力產生了質的飛躍。
隨著電子技術的發展和飛機性能的不斷提高,飛機的操縱系統也發生了巨大的變化,傳統的操縱桿系和鋼索已被電線所取代,既飛行員操縱飛機依靠裝在駕駛桿處的感測器將桿力或桿位移轉換成電信號,通過電線傳到舵機以驅動控制面偏轉,達到操縱飛機的目的,這就是電傳操縱系統。
傳統的操縱桿系的飛機配備的自動飛行控制系統具有的增穩、控制增穩功能,雖然解決了高空、高速飛機的穩定性問題,兼顧了飛行員對飛機穩定性和操縱性的要求,但仍然有一定限制:
1.控制增穩系統的舵面操縱許可權有限為了確保飛行安全,控制增穩系統的操縱許可權只有最大舵偏角的30%左右,很難滿足整個飛行包線內改善飛機飛行品質問題。
2.存在力反傳問題由於飛機的增穩、控制增穩系統通過複合搖臂來連接自動控制系統和不可逆助力操縱系統,舵機工作時,會因為力反傳而使駕駛桿產生非周期振蕩現象。
3.結構複雜、重量重、戰場生存能力低操縱桿系和鋼索再加上飛行控制系統的增穩、控制增穩系統,整個系統重量大、結構複雜,而且機械桿系存在間隙、摩擦等非線性和彈性變形等。在戰場上,由於機械桿系比較集中,一旦被炮火擊中,整個系統就可能失靈,因而戰場生存能力低。
我們知道產生以上缺點的根本原因在於控制增穩系統中存在機械桿系,由此產生一個由電線代替機械桿系設計,最終放棄了機械控制系統,構成了完全由電氣設備組成的電傳操縱系統。
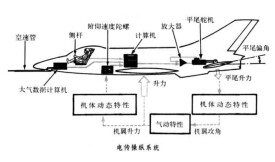
典型的電傳操縱系統是由感測器組(各種陀螺、加速度計等慣性測量器件和迎角感測器等大氣測量器件)、輸入設備、飛行控制計算機、舵機和電氣傳輸線路組成。電傳操縱系統一般按照部件的電器特性分類。採用了模擬感測器、模擬式計算機和輸入輸出設備的系統被稱之為模擬式電傳操縱系統;採用了數字式感測器、數字計算機和輸入輸出設備的被稱之為全數字式電傳操縱系統。實際上現在使用都是模擬式感測器、數字式計算機的半數字式電傳操縱系統。
由於系統沒有機械通道,結構簡單,體積小,重量輕,不存在機械傳動裝置的摩擦、間隙、滯后等非線性不良影響,能顯著提高飛機的操縱品質。由於沒有機械通道,對飛行控制系統可靠性要求很高。
目前一般電傳操縱系統提高可靠性的主要措施是採用余度備份系統。主要的感測器和飛行控制計算機都要留有幾組完全相同且同時工作的系統,通過專門的余度管理計算機進行最後的輸出。一般現代電傳操縱系統都是四餘度系統,也有少數三餘度。以四餘度系統為例,系統由四套完全相同的單通道電傳操縱系統組合而成,保證其可靠性不低於機械操縱系統。四個獨立的通道由四餘度桿力感測器接受駕駛員指令輸入信號,檢測飛機運動四餘度感測器提供的信號,飛行控制計算機對四條通道分別進行數據處理,使各通道分別輸出一個控制信號到舵迴路。四個舵迴路的輸出共同操縱一個助力器使舵面偏轉,操縱飛機做相應的運動。在這個過程中,四個通道的信號要通過監控器或計算機做到不間斷的比較、監控,故障信號被隔離,一個正確信號被輸出,以保證信號完全正確。
現代戰鬥機的速度範圍很廣,尤其飛機從亞音速到超音速飛行時飛機的焦點急劇向後移動。為了確保低速起飛與著陸有足夠的縱向靜穩定度,就必然使高速飛行時的縱向靜穩定度過大其結果是使飛機的機動能力大為降低,同時,飛機的配平阻力增加,持續盤旋過載能力降低。電傳飛控系統的發展,將飛機設計成在低速飛行時具有一定的縱向靜不穩定度,就可以使高速狀態的靜穩定度保持在比較小的量值,從而可以顯著改善飛機機動性,減小配平阻力以及飛機的敏捷性。
第二代飛機的主要操縱系統是由拉杆與搖臂等機械部件構成,所以飛機的飛行品質就主要取決於飛機的氣動布局。以往的設計主要是根據飛機的戰術性能來確定氣動外形,只能根據已選定的氣動外形與總體布局去確定飛機的飛行品質,所以說過去的飛機很少有能全面滿足規範要求的雖然增穩系統、控制增穩系統兼顧了飛機的穩定性和操縱性,但系統的舵面許可權比較小,因此它的作用是很有限的。電傳飛控系統是全許可權,飛行員的指令與反饋通道信號綜合形成主通道控制指令,綜合設計反饋通道與主通道可以很好的協調飛機操縱性與穩定性,此外,反饋通道與主通道的增益可以隨迎角、馬赫數和動壓而調參,這就能在全包線範圍內,不管什麼高度和速度,基本上滿足一級品質要求,這是以往的飛機所不能達到的。
對於非電傳飛機,當飛行在低速狀態時,飛行員要很謹慎地去操縱飛機,使之不超過危險的迎角,這往往使飛機的機動性能得不到最大限度的發揮。對於電傳飛機可以根據飛機的大迎角氣動力特性確定出最大使用迎角,然後設計迎角限制器,使得飛行員在即使接近最大迎角區域飛行並作最大組合操縱也不會超出最大使用迎角這樣,飛行員可以毫無憂慮地操縱飛機,從而可以最大限度地發揮飛機的機動能力。
此外系統還具有自動配平、自動協調滾轉角度、邊界控制、提高戰傷生存力等優點,電傳飛行控制系統由於沒有機械系統,重量輕、體積小,操縱中沒有因摩擦引起的滯后,可減少維修量,而且還可以通過陣風減載、機動載荷控制、機翼和機身結構振型的阻尼及顫振抑制等主動控制技術提高飛機的性能。
單通道電傳操縱系統的可靠性不夠高。由於單通道電傳操縱系統中的電子元件質量和設計因素關係,所以單通道電傳操縱系統的可靠性不夠高。為了提高電傳操縱系統的可靠性,現代軍用和民用飛機均採用三餘度或四餘度電傳操縱系統,並利用非相似余度技術設計備分系統,如四餘度電傳操縱加二餘度模擬熱備分系統。
電傳操縱系統的成本較高。如果就單通道電傳操縱系統而言,電傳操縱系統的成本低於機械操縱系統。但電傳操縱系統必須採用余度系統才能可靠工作,所以電傳操縱系統的總體成本還是比較高的,需要進一步簡化余度和降低各部件的成本。
電傳操縱系統容易受雷擊和電磁脈衝干擾影響,所以,電傳操縱系統需要解決雷擊和電磁脈衝干擾的危害。此外,由於現代飛機越來越多地採用複合材料,其使用率可達30%左右。這樣系統中的電子元件失去金屬蒙皮屏蔽的保護,故抗電磁干擾和抗核輻射的問題更為突出。
20世紀前半期,採用閉環反饋原理的自動控制技術作為機械操縱系統的輔助手段,其主要作用是針對己設計好的飛機剛體動力學特性的缺陷進行補償,實現精確的姿態和航跡控制,減輕駕駛員長期、緊張工作的負擔。到了20世紀60年代,飛機的發展遇到了一些重大難題。例如:大型飛機撓性機體氣動彈性模態問題,進一步提高戰鬥機機動性和戰鬥生存性問題等。這些問題僅靠氣動力、結構和動力裝置協調設計技術己經不能解決,或者要在性能、重量、複雜性和成本方面付出巨大代價才能得到某種折衷的解決方案。研製設計者將注意力轉向採用閉環反饋原理的自動控制技術,通過對一系列單項技術和組合技術的研究、開發和驗證,產生了兩個具有劃時代意義的新飛行控制概念:主動控制技術(ACT)和電傳飛行控制(FI3W)系統。這兩項新技術的出現對飛機的發展產生了巨大的影響。
採用主動控制技術的電傳操縱系統,可使飛機的飛行控制、推力控制和火力控制的主要控制功能綜合成為可能,從而極大地改善了飛機的性能。如採用主動控制技術的電傳操縱系統后,放寬靜穩定性(RSS)控制技術使B-52轟炸機平尾面積減少45%,結構總重量減少6.4%,航程增加了4.3%;使戰鬥機升阻比提高了8%-15%。機動載荷控制(NILC)技術使C -SA運輸機翼根彎曲力矩減少30%-50%;使F-4E戰鬥機盤旋角速度增加了33%。主動渦流控制(AVC)技術與方向舵協調使用時,使X-29在低速大攻角飛行時的偏航速率增加50%。採用任務適應性機翼(MAW)比採用常規機翼可使飛機航程增加30%,機翼承載能力提高50%。
數字式電傳操縱系統具有高度的靈活性,容易實現多種邏輯運算和電子綜合化,實施複雜控制律和修改控制律都很方便,尤其容易與自動駕駛儀、火力控制系統、導航和推力控制系統交連,從而使飛機的性能和攻擊精度均發生質的變化。為保證飛機安全可靠性,在系統中常有備分系統,凡其工作原理與主系統是不相似的,則均可成為備分系統,如機械操縱系統、電氣操縱系統和模擬式電傳操縱系統。對於數字式電傳操縱系統,目前不採用體大笨重的機械桿系作為備用系統,而常採用模擬式電傳備用系統。如果主系統的安全可靠性相當高,則可以不採用備用系統。此外,再通過四餘度或自監控的三餘度系統,使電傳操縱系統達到雙故障安全。
數字電傳操縱系統和主動控制技術己廣泛地應用於第三代軍機和先進的民機。綜合控制技術也成為第四代軍機的典型標誌之一,在F-22戰鬥機上,綜合飛行/推力控制功能由列為飛行關鍵系統第一位的飛行器管理系統提供,飛行器管理系統的支柱就是三餘度數字電傳操縱系統。
隨著電子技術的發展和飛機性能的不斷提高,目前,電傳操縱系統正在向自適應飛行控制系統的方向發展。美國早在20世紀60年代初就對自適應飛行控制系統作了試飛,此後還在不斷進行研究和試驗,但始終沒有在生產型飛機上使用過,究其原因可能是性能還不夠完善。但未來隨著馬赫數高達6-8的高超音速飛機的到來,以及為減小阻力和提高隱身特性的無尾飛機的出現,飛機的氣動特性變化範圍很大,用常規飛行控制方法很難勝任,必須採用自適應控制。新一代的自適應飛控系統由於計算工作量很大,將採用并行處理和神經網路技術,並將採用光纖來傳輸大量數據,而由電傳飛行控制系統發展成光傳飛行控制系統。
基本信息
- 中文名
- 電傳操縱系統
- 外文名
- Fly by wire flight control system
- 用於
- 電子飛行控制系統
- 別名
- 線傳操縱系統