無刷馬達
無刷馬達
無刷馬達是一種在現代來說很典型的電一體化產品,相對於傳統的刷式馬達,無刷馬達具有低噪音、高能量效率和耐用性等優點。
無刷馬達一般是以自控式運行的,所以一般情況下它不需要像變頻調速下重載啟動的同步電機那樣在轉子上面重新把繞組啟徠動,這也就意味著它也不可能會在該負載突變時產生震蕩以及失步,這也就是它的出色之處,同時也是被廣大人民群眾使用的重要原因。
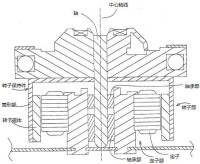
無刷馬達結構
無刷馬達在構造上是用永久磁鐵作為轉子,並且用霍爾效應感應電動機轉子的位置,當轉子之相位為時令定子激磁,如此可以達到最高的運轉效,用這樣的原理也可以使用在四程機車引擎點火正時上。
無刷直流伺服馬達
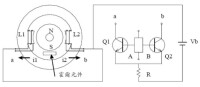
當控制要求高時,可以增加場繞組線圈數目與霍爾元件數目,因此工業上常使用的四相、五相無刷馬達,即是指此類運用霍爾元件製成的無刷直流伺服馬達。
無刷徠馬達控制器包含:
1.適於連接至外部無刷馬達的一個或多個轉子位置檢測器的微控制器;以及
2.適於連接至外部無刷馬達的多個繞組的多個馬達驅動電路。上述微控制器連接至多個馬達驅動電路。
電動機構造中環由於是採用接觸式通電的方式,所以也稱作電刷。在直流馬達中常以石墨作為電刷的材質,電刷長期與電動機的轉子摩擦會造成相當程度的噪音,同時也會因磨耗而需要考慮維修的問題。在交流電動機中電刷則採用屬材製作,在長期磨耗下會造成間隙( Gap) ,容在運轉時發出火花,此類的問題對電動機的可靠與安全性有相當程的影響。無刷馬達就是在這樣的需求下產生。
1.有刷馬達工作時,線圈和換向器旋轉,磁鋼和碳刷不轉,線圈電流方向的交替變化是隨馬達轉動的換相器和電刷來完成的。從名字上可以看出有刷馬達有碳刷,無刷馬達沒有碳刷。
2.無刷直流馬達由電動機主體和驅動器組成,是一種典型的機電一體化產品。由於無刷直流馬達是以自控式運行的,所以不會象變頻調速下重載啟動的同步馬達那樣在轉子上另加啟動繞組,也不會在負載突變時產生振蕩和失步。
3.在實際生產過程中,由於有刷有齒直流馬達是高速馬達,齒輪的齒很小,易磨損,但力量大,爬坡能力強。而無刷直流馬達,在使用過程中省去了二、三年換碳刷的麻煩。但由於在控制無刷馬達的過程,要求精度極高。相比之下有刷無齒的直流馬達,雖然要更換碳刷,但更換碳刷是十分容易的,而且馬達的控制較為簡單,馬達運轉平穩,安全係數高。

基本信息
- 中文名
- 無刷馬達
- 運用領域
- 機械
- 原理
- 沿著中心軸線旋轉的軸
- 優點
- 低噪音、高能量效率和耐用性等。