Maxicode
Maxicode
1980年代晚期,美國知名的UPS(United Parcel Service)快遞公司認知到利用機器辨讀資訊可有效改善作業效率、提高服務品質而研發的條碼。
1980年代後期,美國知名的UPS(United Parcel Service)快遞公司認知到利用機器辨讀資訊可有效改善作業效率、提高服務品質,故從1987年開始著手於機器可讀表單(Machine Readable Form)的研究,發覺到條碼是相對成本最低的可行方案。為了能達到高速掃瞄的目的,UPS捨棄了堆疊式二維條碼的做法,重新研發一種新的條碼,在1992年時推出UPS code,並研發出相關設備,此即Maxicode的前身。1996年時,美國自動辨識協會(AIMUSA)制定統一的符號規格,稱為Maxicode,也有人稱USS-Maxicode(Uniform Symbology Specification- Maxicode)。本文所指的Maxicode,都是遵循AIMUSA所制訂的標準。
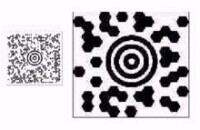
Maxicode是一種中等容量、尺寸固定的矩陣式二維條碼,它由緊密相連的六邊形模組和位於符號中央位置的定點陣圖形所組成。Maxicode是特別為高速掃瞄而設計,主要應用於包裹搜尋和追蹤上。UPS除了將Maxicode應用到包裹的分類、追蹤作業上,並打算推廣到其他應用上。1992年與1996年所推出的Maxicode符號規格略有不同,就外觀上來看,圖9.1的左邊是1992年剛推出的樣子,右邊則是現在Maxicode 應有的樣子。

Maxicode的外觀
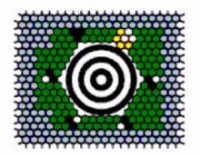
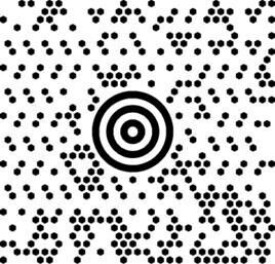
1、外形近乎正方形,由位於符號中央的同心圓(或稱公牛眼)定點陣圖形 (Finder Pattern),及其周圍六邊形蜂巢式結構的資料位元所組成,這種排列方式使得Maxicode可從任意方向快速掃瞄。其外觀與中心放大圖如圖所示。
Maxicode外觀與中心放大圖
3、定點陣圖形:Maxicode具有一個大小固定且唯一的中央定點陣圖形,為叄個黑色的同心圓,用於掃瞄定位。此定點陣圖形位在資料模組所圍成的虛擬六邊形的正中央,在此虛擬六邊形的六個頂點上各有3個黑白色不同組合式所構成的模組,稱為「方位叢」(Orientation Cluster),其提供掃瞄器重要的方位資訊,見圖
Maxicode的符號排列方式
主要訊息有兩個特殊作用,其中最重要的是包含4個模式位元(Mode Bits),圍在定點陣圖形右上方全白的方位叢左邊,以淡灰色所標識的四個位元即是,其直接指示出其餘的資料編碼模式。另一個用途是,剩餘的56個資料位元則依包裹分類追蹤需要的所有資訊編碼成結構化收件人訊息(Structured Carrier Messages),因此大部份在高速掃瞄的狀況下,只需要將主要訊息解碼就夠了。
在主要訊息外圍的淡灰色部份(未表示完全),用來儲存次要訊息(Secondary Messages),其提供額外的訊息,如來源地、目的地等人工分類時所需的重要資訊。
5、模式:是一種允許符號有不同結構的機制,Maxicode共有7種模式(模式0~模式6),但其中有2個模式(模式0、模式1)已作廢。
Maxicode允許對256個國際字元編碼,包括值0~127的ASCII字元和128~255的擴展ASCII字元。在數字組合模式下,可用6個字碼表示9位數字。用於代碼切換和其他控制字元也包括在其字元集中。
1、每個字元由6個六邊形的模組組成。
2、每個模組表示一個二進位位,深色模組表示“1” ,淺色模組表示“0”。
3、通常六個模組排成3層,順序為右上至左下,見圖所示。
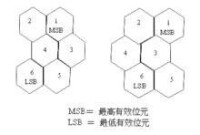
Maxicode的位元組成排列方式
1、抓取一個包含Maxicode標籤的影像。
2、定位到公牛眼(同心圓定點陣圖形)。
3、調整抓取到的Maxicode影像大小。
4、蓋掉公牛眼(公牛眼部份轉成空白)。
5、加強每一個六邊形的邊緣。
6、執行一個向前掃瞄的動作。
7、定位至掃瞄到的叄個亮點(虛擬六邊形的左上角)。
8、執行一個反向的掃瞄動作。
9、計算出標籤的方向後,決定使用該方向的方位叢。
10、使用反向的掃瞄影像,定位到每一個六邊形的中央,再與原先的影像進行比對。
11、重建二進位順序。
12、執行錯誤偵測與糾正,獲得原始訊息。
基本信息
- 外文名
- Maxicode
- 所屬國家
- 美國