迭代學習控制
迭代學習控制
迭代學習控制(iterative learning control,簡稱ILC)由Uchiyama於1978年首先提出。
1984年,Arimoto等人用英文介紹了該方法。它是指不斷重複一個同樣軌跡的控制嘗試,並以此修正控制律,以得到非常好的控制效果的控制方法。
迭代學習控制是學習控制的一個重要分支,是一種新型學習控制策略。它通過反覆應用先前試驗得到的信息來獲得能夠產生期望輸出軌跡的控制輸入,以改善控制質量。與傳統的控制方法不同的是,迭代學習控制能以非常簡單的方式處理不確定度相當高的動態系統,且僅需較少的先驗知識和計算量,同時適應性強,易於實現;更主要的是,它不依賴於動態系統的精確數學模型,是一種以迭代產生優化輸入信號,使系統輸出儘可能逼近理想值的演演算法。它的研究對那些有著非線性、複雜性、難以建模以及高精度軌跡控制問題有著非常重要的意義。
迭代學習控制
最初的學習控制-迭代學習控制(ILC),由日本學者首倡於1978年。不像其他的的控制方法從線性受控對象起步,迭代學習控制開門見山就把非線性系統作為研究對象,且要在有限區間[0,T]上實現輸出完全追蹤的控制任務。這裡完全追蹤(perfect tracking)指系統的輸出自始至終,無論是暫態還是穩態,都和目標軌道保持一致。顯然,迭代學習控制的起點要比其它控制方法高出一截可是,從二十年的發展歷程看,起點過高也有不利的一面:發展空間不足以及難以和主流控制方法相融合。
而事實上,只要任務是可重複的,或系統干擾是周期性的,都可用ILC來解決實際問題。從迭代學習控制方法的產生至今已有二十多年的歷史它已經發展成為智能控制領域的一個新的發展方向,它的研究對那些有著非線性、強耦合、難以建模以及高精度軌跡控制的問題有非常重要的意義。
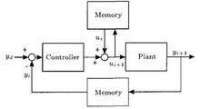
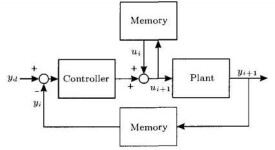
迭代學習控制適用於具有重複運動性質的被控系統,它的目標是實現有限區間上的完全跟蹤任務。它通過對被控系統進行控制嘗試,以輸出信號與給定目標的偏差修正不理想的控制信號,使得系統的跟蹤性能得以提高。迭代學習控制的研究對具有較強的非線性耦合、較高的位置重複精度、難以建模和高精度軌跡跟蹤控制要求的動力學系統有著非常重要的意義。
基本信息
- 中文名
- 迭代學習控制
- 外文名
- iterative learning control
- 性質
- 學習控制的一個重要分支