升力體
用於航空航天的飛行器
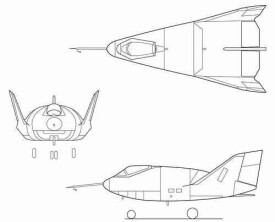
相對於傳統飛行器,升力體是一種完全不同的概念。它沒有常規飛行器的主要升力部件-機翼,而是用三維設計的翼身融合體來產生升力。這種設計可消除機身等部件所產生的附加阻力和機翼與機身間的干擾,從而有可能在較低的速度下獲得較高的升阻比,達到提高全機性能的目的。

升力體
美國初期的航天器回收方式是濺落。這種方式雖十分昂貴,但當時美蘇正捲入空前的軍備和太空競賽之中,所以也只好選擇這種可以更快、更容易地實現的回收方式了。
後來。美國科學界及軍界迫切地希望開發出一種更省錢、省時而且可以在太空和大氣層中反覆使用的飛行方式——這種飛行器必須耐得住重返大氣層時的高溫,還要像常規飛機一樣安全著陸。當然,這一切都處於絕密研究狀態。當時研究的各種方案都圍繞著一半像航天器、一半像飛機的所謂升力體式飛行器。
升力體式設計的思想是由艾格爾斯和阿倫兩位科學家於1957年在美國航空航天局(NASA)艾姆斯研究中心從事彈道導彈再入問題研究時偶然發現的。試驗中,艾格爾斯注意到鈍頭錐形體耗散再入能量的速度要比尖頭錐體快。更重要的是,他觀察到錐形體上表面的平坦部分在穿過地球大氣時可以產生升力,並增加氣動穩定性。這一發現意味著,至少從理論上講,可以造出一種無翼飛行器——它可以飛到太空,能承受再入時的氣動加熱,也能像普通飛機一樣在空氣中滑翔並有控著陸——升力體式飛行器方案由此誕生了。
最初,NASA對利用艾格爾斯的發現並不熱心。儘管濺落回收存在這樣那樣的弊端,但卻是最容易實現的,只需讓飛船直接落向地面即可。不過,隨著科學家們開始規劃研製更先進的可復用航天器,以取代“水星”號、“雙手星座”號和“阿波羅”號等彈道式和半彈道式回收飛船,他們認識到了艾格爾斯的發現的價值。
最先對升力體式設計進行認真研究的是NASA設在加州愛德華茲空軍基地的飛行研究中心(即後來的德菜頓飛行研究中心)。當時這項研究沒有得到官方的支持,因為NASA的高級官員們打開始就認為採用這種方案的飛行器難以穩定飛行。然而。1962年2月,NASA工程師里德還是針對升力體式設計開展了一項非正式的研究計劃。
里德不單單是工程師,更是一名航模愛好者,而且很有水平。首批試驗是利用幾架蒙著牛皮紙的、精巧的滑翔機模型進行的。這些小模型拖在採用無線電控制的飛機模型後面,以採集與設計有關的數據。里德用8毫米家用攝像機拍下了飛行過程,以供隨後研究。儘管只是個人行為,但這一項目還是驗證了升力體設計的可行性。有了這些飛行試驗數據,里德便準備著手下一步的研究。
里德深知該項目要得到NASA的正式批准,必須得到該局試飛員的支持。為此,它特意向X-15火箭飛機的老資格試飛員湯姆遜介紹了項目情況。湯姆遜在對里德的工作進行一番研究后,同意對將製造出來的這種飛機進行試飛。隨後,兩人找到飛行試驗中心主任比克爾。經勸說,比克爾批准根據里德的設計製造一架原型滑翔機。4個月後,代號M2-F1的滑翔機誕生了。
M2-FI比里德用紙和輕質木材製造的模型機強不了多少。它由鋼管架外包木殼構成,13度角錐形機體的上表面被設計成平面。後部的兩個垂直操縱舵和方向舵控制偏航,兩個后緣襟翼和升降副翼——組合起來的副翼和升降舵——控制俯仰和滾轉。這樣一種很特別的飛行器在製造上需要很高的技巧,NASA僱員中一些“航空愛好者’在其中發揮了他們的才幹,也付出了不少辛苦。M2-F1樣子並不漂亮,外號“大胖子”。到了這一步,該項目還是有些私下裡“瞎搗鼓”的色彩。NASA總部沒有給它預算,也沒正式認可,比克爾甚至沒通知總部要進行飛行試驗。原型機的製造和試飛都是在經費很少的條件下完成的。
艾姆斯研究中心(艾格爾斯最初進行升力體研究的地方)很希望該項目能實施下去,為其提供了技術支持和風洞試驗條件。首批風洞試驗的結果令人鼓舞,為進行低空試飛奠定了基礎。最初的試飛在羅傑斯干湖床進行,由加大了馬力的一輛“龐蒂亞克”敞篷車把M2-F1拖到高速,結果效果還不錯,試驗機在拖繩鬆開前有時可升到30米的高度,使駕駛員可拉平飛行並駕機正常著陸。這些試驗為研製操縱系統和開展更大膽的試飛鋪平了道路,並使多名飛行員熟悉了這種怪形怪狀的飛機的飛行特性。
比克爾把低空拖曳試飛的結果呈送給了NASA總部,並獲准進行高空試飛。1962年日月16日,由湯姆遜駕駛的M2-Fl由R4D飛機(C-47軍用運輸機的海軍型號,亦即DC-3民用客機)拖至3000米高空並釋放。兩分鐘后,滑翔機在干湖床上著陸。同後來的升力體飛行器一樣,M2-F1的橫側操縱性能很差,所以很難駕駛。用湯姆遜的話說,就便是在駕駛一塊“流線型磚頭”。
儘管如此,飛行試驗還是繼續進行,而且試飛員們不久也適應了這種飛機怪僻的飛行特性;到1964年8月,M2 F1分別由7人駕駛成功進行了百餘次飛行,其結果使人們對升力體方案的可行性不再懷疑。根據試驗情況,比克爾、里德和湯姆遜向NASA總部提出了建造重一些的升力體原型機並進行試驗的計劃。
當時,飛行研究中心並不是美國研究升力體方案的唯一機構,位於弗吉尼亞州的NASA蘭利研究中心也開展了這項研究,而且空軍也在利用一架原型機進行試驗。為便於協調,NASA和空軍設立了一項正式的聯合研究計劃,以建造升力體飛行器並進行試驗。為了避免重複並能對儘可能參的設計進行研究,飛行研究中心還決定對其它眾多原型機設計公開其項目情況,以供借鑒。
NASA向新設立的聯合研究計劃提供了兩種設計M2-F2以M2—Fl為基礎,採用鈍頭半錐形設計,由艾姆斯研究中心研製;HL-10呈“切平”的三角形,是由蘭利中心根據其研究成果設計的。為節省費用,兩個型號同時由諾斯羅普公司建造。
美國空軍到60年代中期開始著手分三個階段實施其自己的“航天器技術與預研試驗”計劃,旨在開發更先進的再入航天器。該計劃初期的重點是研製和試驗稱為SV-5的無人升力體原型機。SV-5最初的試飛是由充氫氣球把1.5米長的模型試驗機帶到製造廠的上空進行的,不久改用“宇宙神”SLV-3型火箭在范登堡空軍基地把原型機發射到上空,沿西部導彈試驗靶場飛行,並在海上回收。這些無人飛行試驗對升力體研究工作做出了重大貢獻,其中的SV-5D原型機成了唯一一種能從軌道速度完成完整的再入過程的升力體,驗證了再入防熱系統的有效性。
在上述研究的基礎上,空軍最終研製出於自己的載人升力體原型機。即SV-5P。該機隨後改稱X-24A,並被列入NASA和空軍的升力體聯合研究計劃。X-24A充分利用了空軍已有的研究成果,採用錫奧科爾公司出產的、曾成功用於X-l和X-15計劃的XLR-11火箭發動機,而且所用的載機就是NASA那架曾攜帶著名的X-15高超音速研究火箭飛機進行試飛的B-52飛機。
NASA和空軍的聯合計劃並沒有完全延續升力體方案研究初期的做法。例如,空軍在開展SV-5飛行試驗時,沒有讓試驗機進行常規的水平著陸,而是在海面上空由帶有專門設備的飛機在半空中回收乘降落傘下降的試驗機。在聯合研究項目下,空軍放棄了這種“空中抓捕”方式。改用水平著陸方式。
三種新型升力體原型機中最先試飛的是M2-F2。這種圓底、平頂、圓頭的半錐形飛機長6.8米,寬2.9米,由尾部的兩個垂直方向舵操縱,干1965年6月1 5日交付給NASA。儘管個頭和形狀與M2-F1大同小異,但它全部由金屬製成,重近2.3噸,約為M2-F1的6倍。另外,它的各個分系統更為複雜,所用的XLR-11發動機(與X-24A相同)推力為35.6千牛,可把試驗機加速到兩倍於音速的速度。
1966年7月12日,M2-F2由湯姆遜駕駛進行了首次飛行,與隨後進行的升力體飛行一樣,這次飛行是嚴格按照程序進行的。由於要先摸清飛行特性,所以初期的飛行都是無動力的。首次試飛時,試驗機掛在B-52載機右機翼的掛架上被攜帶到13.7公里的高空,投放后滑翔返回地面。在3.5分鐘的下降過程中,涵姆遜讓試驗機進行了多次機動。剛離開載機,他就做了一次90度轉彎。在7.6公里的高度上,他演練了一次著陸拉平動作,而後再次轉彎90度,以進行最終的進場著陸。儘管動作都做成了,但過程卻並不順利。離開載機不久,試驗機就因操作問題而發生了嚴重的滾動,好在湯姆遜能很快適應。恢復了對飛機的控制,最終準確地以315公里的時速在羅傑斯干湖床上著陸。
在隨後的飛行試驗中,飛行員們基本上都能掌握M2-F2的操縱特性,但M2-F2也並沒百依百順。1967年5月10日。在第16次飛行中,由NASA試飛員彼特森駕駛的這架試驗機在進入進場著陸階段時,發生嚴重擺動。彼特森經過努力完成了拉平動作,試驗機以350公里的速度輕輕接地,但起落架卻未能完全展開。試驗機因此而失控。翻滾了6個跟頭后才停了下來。事故使機體受損嚴重,彼特森也受了重傷。M2-F2最終進行了重造,因變動很大而改稱M2-F3,並繼續完成了總共27次滑翔飛行。
事實上,在被特森出事前幾個月,HL-10就也開始了首批試飛。首次滑翔飛行原定於1966年12月21日進行,但因電氣故障而中止。次日上午,由彼特森駕駛的HL-10在羅傑斯干湖床上空13.7公里由B-52飛機投放。試驗機幾乎完全無法控制。在3分9秒的飛行中,它總是在做機動動作時俯仰過度。不過彼特森還是使它安全著陸了。為改進操縱特性,HL-10停飛了一段時間,技術人員在此期間擴展了外傾垂直尾翼的前緣並使其上翹。改進后的試驗機於1968年3月15日再次飛行,證明了改進措施的有效性。試驗機在平穩著陸前達到了354公里的最高時速,試驗取得圓滿成功。在有動力試飛前,HL-10共成功進行了11次滑翔飛行。
此後,HL-10又開始使用XLR-11發動機進行有動力飛行。最初的飛行試驗了升力體的穩定性及使用火箭動力的控制性能,速度僅比無動力飛行稍快。同以往一樣,試驗機也是由載機攜至高空投放。1968年10月23日的首次有動力飛行在空軍少校金特里的駕駛下進行,但發射后不久火箭發動機出了故障。不過試驗機在拋掉推進劑后還是安全地著陸了。同年11月13日。試驗機在NASA試飛員曼克的駕駛下再次飛行,並取得成功。
隨著越來越頻繁的有動力試飛的順利進行,NASA開始瞄準更高的目標。1969年5月19日,第17次飛行的HL-10速度達到了1.3倍音速,高度達到16.2公里,成了第一架突破音障的升力體飛行器。1970年2月18日,HL-10在空軍上尉霍格的駕駛下,速度達到1.86倍音速。成為飛得最快的升力體。9天後,NASA飛行員達納又創造了27524米的升力體飛行高度紀錄。至此,HL-10短暫的生涯也接近了終點。
與NASA的兩種試驗機一樣,由空軍提供的X-24A升力體原型機最初飛行時也是無動力的。在金特里和曼克的駕駛下,這種滑翔飛行共進行了10次。儘管有其它升力體飛行的經驗可惜鑒,但X-24A的滑翔飛行並未做到萬無一失。第3次飛行中,由金特里駕駛的試驗機在離預定投放時間還差近1分鐘時,意外地從載機上掉下。事後證明這是一次人為失誤,而不是機械故障。B-52載機上的副駕駛伸手撥動釋放機構的保險開關時不小心觸動了發射開關,造成了X-24A提早45秒發射。
面對突發情況,金特里和地面控制人員表現得很冷靜。負責地面控制的曼克迅速跑到雷達導航圖前,用鉛筆估算了一下X-24A距預定發射點的距離。隨即他又來到干湖床地圖前,發現試驗機距北頭18號跑道的原定著陸點太遠,立即決定改在湖床中部11公里挺的l7號跑道著陸。他的快速反應節省了時間。X-24A不僅安然著陸了,而且還按預定要求完成了全部旨在獲取數據的機動動作。
開始有動力飛行后,X-24A暴露了它的最大弱點。作為滑翔再入
飛行器,它的操縱品質還是不錯的;但在啟用XLR-11火箭發動機作動力時,它的操縱性和穩定性就差了。儘管如此,試飛工作並沒有停止。1970年10月14日,X-24A進行了首次超音速飛行,速度達到1.15倍音速。最終該機達到了1.6倍於音速的速度。
70年代初,NASA和空軍繼續進行其升力體計劃,利用試飛對美國太空梭的各種設計方案進行研究。但當時別的航天計劃正搞得轟轟烈烈,所以這些試飛工作沒有受到公眾的關注。不過,對於實現升力體研究計劃的最終目標——建造可重複使用的航天器,這些飛行還是起到了應有的作用。
X-24A在1971年沒有進行飛行,整個試驗機進行了徹底改造。改造后的該試驗機完全是一副新面孔,改稱X-24B。它充分利用了已取得的研究成果、與“帶翅膀的土豆”的老樣子相比,它“出落”成了圓滑的三角翼式高機動性再入飛行器。
1975年8月5日,升力體研究計劃迎來丁它最輝煌的一天。這一天,曼克駕駛的X-24B掛在B-52飛機的機翼下升空。離開載機后,它使用自身的火箭發動機像為它護航的飛機一樣靈活自如地爬升到了18.3公里的高度,然後又返回地面,並在愛德華茲空軍基地的混疑土跑道上無動力地完成了著陸動作。這次6分鐘的飛行證明,可以研製出這樣一種飛行器,它不僅能夠再入大氣層,而且隨後也可以穿越大氣飛行,並可像普通飛機一樣在跑道上的自如而準確地進行無動力著陸。
NASA和美國空軍進行的升力體飛行試驗儘管是默默進行的,沒有引起什麼轟動,但仍然在航空和航天史上豎起了一塊豐碑。那些試驗機可謂是可重複使用航天器及太空梭研製工作的開路先鋒,為當今乃至未來的太空旅行鋪平了道路。通過正們的飛行,有關部門制訂出了無動力著陸的規程,美國太空梭的設計人員也據此取消了太空梭的著陸發動機,大大增強了太空梭的性能,簡化了設計,提高了運載能力。
不過,升力體試飛工作的成效現在很可能還尚未得到最大的體現。眼下的太空梭並不是純升力體設計,而是一個因載貨空間的載貨能力要求所限而採取的折衷方案。就像改進后的X-24B一樣,它採用的是所謂的“混合機體”設計,機體形狀和小型三角翼的組合使其既能承受再入氣動加熱,又能提供水平著陸所需的足夠的升力。
目前美國正在研製新一代的可復用航天器,其中令人矚目、有可能取代現役太空梭的X-33試驗機再次嘗試使用升力體型機體。這些神奇的無翼飛行器在書寫了一段歷史之後,很可能也代表著美國太空開發的未來。
基本信息
- 中文名
- 升力體
- 外文名
- lifting body
- 國家
- 美、俄兩國
- 優勢
- 消除附加阻力和干擾
- 不同點
- 沒有機翼
- 特點
- 用三維設計的翼身融合體產生升力