重力對高速旋轉中的陀螺產生的對支撐點的力矩不會使其發生傾倒,而發生小角度的進動。此即陀螺效應。一言以蔽之,就是物體轉動時的離心力會使自身保持平衡。陀螺效應的結果可以這樣說,任何繞垂直軸的偏航導致俯仰運動,任何繞橫軸的俯仰導致偏航運動。陀螺效應一直伴隨著直升機的飛行。
所謂陀螺效應,就是旋轉著的物體具有像陀螺一樣的效應。陀螺有兩個特點:進動性和定軸性。當高速旋轉的陀螺遇到外力時,它的軸的方向是不會隨著外力的方向發生改變的,而是軸圍繞著一個定點進動。大家如果玩過陀螺就會知道,陀螺在地上旋轉時軸會不斷地扭動,這就是進動。
簡單來說,陀螺效應就是旋轉的物體有保持其旋轉方向(旋轉軸的方向)的慣性。
賴柴定理
陀螺效應
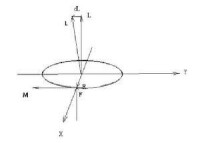
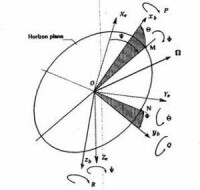
質點系對某定點的動量矩矢端的速度,等於外力對於同一點的主矩。也就是說動量矩矢端點的速度大小與外力主矩的大小相等,方向與外力主矩的方向相同。對於繞自身轉軸Z'轉動的陀螺,若在Z'上施加一個力矩Mo,則進動角速度矢量為 ωe=Mo/Jz'ω sinθ Mo 是施加在陀螺軸線上的外力矩。 Jz' 是陀螺關於軸Z'的轉動慣量 ω 是陀螺自轉速度 θ 是Z'軸與進度軸之間的夾角
賴柴基表達式
由於陀螺的自轉角速度為常量,動量矩矢量在賴柴基下對時間的相對導數,上式可表為
上式也可表為
主矩是陀螺定點運動的約束物施加於陀螺的,故在約束物上將受到一力偶,稱為陀螺力矩,其力偶矩為
表明對於一高速轉動的物體,在迫使它改變空間方向的物體上將受到一陀螺力矩。這種效應稱為陀螺效應。
例子

陀螺效應
一個轉動的物體,當在某一點施力,施力的效果會出現在沿轉動方向 90 度的地方出現,而且轉動的物體會有保持原來狀態,抗拒外來力量的傾向,也就是轉動中物體的軸心會極力保持在原來所指的方向。像槍管中的膛線使子彈高速旋轉以保持直進性就是運用陀螺效應,直升機高速旋轉的主旋翼同樣的也會有陀螺效應產生,控制方式也必須考慮這種力效應延後 90 度出現的陀螺效應。

陀螺效應
陀螺效應一直伴隨著直升機的飛行。例如:要使直升機仰俯,就必須要使直升機左右的升力不平衡而不是使其前後不平衡。基於這種原理下面就來解釋遙控直升機的所謂貝爾-希拉操縱方式。
直升機中,主旋翼就是一個大陀螺,它本身具有陀螺效應。當我們改變主旋翼傾角時,直升機的運動狀態就會發生改變。但同時,如果用
舵機直接改變主旋翼的傾角來控制飛機,問題是很多的。首先,主旋翼傾角的改變需要較大的力矩。如果用十字盤直接控制的話,強大的、交變的力矩將會直接作用到舵機上。這樣舵機將會受到很大負荷,操縱精度會嚴重下降。第二,當直升機受到輕微擾動后,由於陀螺的進動性,直升機將不會恢復原來狀態,而是繞著垂線方向進動。
陀螺效應
由於重力不通過旋翼頭中心,所以造成力矩的產生,從而導致主旋翼發生進動。這個問題是嚴重的,會直接導致遙控直升機懸停及飛行時無法穩定。基於以上問題,貝爾-希拉操縱方式產生了。
操縱過程:
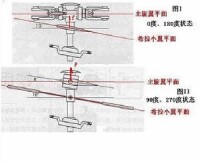
一、初始狀態

陀螺效應
希拉小翼由於空氣和離心力作用,和主旋翼平面平行。此時兩片主旋翼升力相等,飛行狀態不發生變化
二、外界氣流對飛機進行干擾。
當遇到氣流時,由於主旋翼的旋轉,會導致左、右主旋翼相對於空氣的速度不同,從而產生力矩,使飛機偏離平衡位置。
陀螺效應
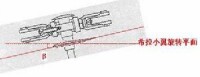
飛機機身及主旋翼平面由於干擾而失去平衡位置。但由於希拉小翼採用對稱翼型,不會受到外界干擾。由於陀螺效應的定軸性,希拉小翼平面保持不變。所以此時主旋翼平面由於與希拉小翼平面有夾角而產生恢復力矩,抵抗外界干擾。這就是貝爾-希拉控制方式的自穩定過程。也正是這個過程,使得遙控直升飛機避免了被干擾后就陷於進動的問題。同時,當直升飛機高速前進時,由於左、右主旋翼相對空氣的速度不同,會導致力矩的產生,使飛機抬頭的現象也被這種貝爾-希拉控制方式有效抑制,從而有效地提高了遙控直升飛機的可操縱性。值得注意的是,貝爾-希拉自穩定過程不能抑制過強的干擾。原因是希拉小翼旋轉平面保持原來運動狀態的同時,由於機身的傾斜,小翼與空氣平面會產生夾角,從而破壞小翼原來的運動狀態。
陀螺效應
由於β角的存在,希拉小翼旋轉平面會向主旋翼旋轉平面方向旋轉,最後趨於平行。所以貝爾-希拉的自穩定過程是有限的。還需要其他手段(比如使希拉小翼不太靈敏)來增加穩定性。

陀螺效應
直升機飛行的基本原理是利用主旋翼可變角度產生反向推力而上升,但對機身會產生扭力作用,於是需要加設一個尾旋翼來抵消扭力,平衡機身,但怎樣使尾旋翼利用合適的角度,來平衡機身呢?這就用到
陀螺儀了,它可以根據機身的擺動多少,自動作出補償訊號給
伺服器,去改變尾旋翼角度,產生推力平衡機身。以前,模型直升機是沒有陀螺儀的,油門、主旋翼角度和尾旋翼角度很難配合,起動后便儘快往上空飛(因為飛行時較易控制),如要懸停就要控制桿快速靈敏的動作,所以很容易撞毀,現在已有多中直升機模型使用的陀螺儀,分別有機械式、電子式、電子自動鎖定式。
在理解螺旋槳的陀螺效應之前,理解基本的陀螺運動原理是必要的。陀螺儀的所有實際應用都基於陀螺效應的兩個基本屬性:在空間和進動上的剛度。這裡要討論的就是進動。
進動是一個自旋轉子受到作用於輪緣的擾動力的合成作用,或者擾動。作用一個力之後,合成力在旋轉方向前面90度位置生效。

陀螺效應
飛機旋轉的螺旋槳是一個很好的陀螺裝置,這樣它也有類似屬性。任何時刻施加一個擾動螺旋槳旋轉面的力,合成力位於旋轉方向的前面90度位置,方向和施加的力是一樣的,將導致一個俯仰運動或者偏航運動,或者兩種運動的合成,具體依賴於力的作用點。
扭矩效應的這個因素總是和后三點式飛機有關係,也更明顯,在尾輪抬起后的飛機起飛搖擺過程中最常發生。
俯仰角的變化和在螺旋槳飛機的旋轉頂部施加一個力有相同的效應。合成力在垂直軸的90度位置發生作用,導致飛機向左的偏航運動。這個運動的程度取決於很多變數,其中之一是尾輪抬升后的急轉。然而,當一個力作用到轉動的螺旋槳的邊緣的任何一點,進動或者陀螺效應總會發生;合成力將仍然是在旋轉方向上偏離作用點90度的位置。根據力的作用位置,會導致飛機左偏航或者右偏航,上仰或者俯衝,或者是俯仰和偏航的結合。
陀螺效應的結果可以這樣說,任何繞垂直軸的偏航導致俯仰運動,任何繞橫軸的俯仰導致偏航運動。
為糾正陀螺效應的影響,飛行員有必要適當的使用升降舵和方向舵來防止不必要的俯仰和偏航運動。
陀螺效應的一個很重要而廣泛的應用就是陀螺儀。
簡介
陀螺效應
現代陀螺儀包括干涉式陀螺儀和諧振式陀螺儀兩種,它們都是根據塞格尼克的理論發展起來的。塞格尼克理論的要點是這樣的:當光束在一個環形的通道中前進時,如果環形通道本身具有一個轉動速度,那麼光線沿著通道轉動的方向前進所需要的時間要比沿著這個通道轉動相反的方向前進所需要的時間要多。也就是說當光學環路轉動時,在不同的前進方向上,光學環路的光程相對於環路在靜止時的光程都會產生變化。利用這種光程的變化,如果使不同方向上前進的光之間產生干涉來測量環路的轉動速度,就可以製造出干涉式
光纖陀螺儀,如果利用這種環路光程的變化來實現在環路中不斷循環的光之間的干涉,也就是通過調整光纖環路的光的諧振頻率進而測量環路的轉動速度,就可以製造出諧振式的光纖陀螺儀。從這個簡單的介紹可以看出,干涉式陀螺儀在實現干涉時的光程差小,所以它所要求的光源可以有較大的頻譜寬度,而諧振式的陀螺儀在實現干涉時,它的光程差較大,所以它所要求的光源必須有很好的單色性。
應用
陀螺效應
陀螺儀器最早是用於航海導航,但隨著科學技術的發展,它在航空和航天事業中也得到廣泛的應用。陀螺儀器不僅可以作為指示儀錶,而更重要的是它可以作為自動控制系統中的一個敏感元件,即可作為信號感測器。根據需要,陀螺儀器能提供準確的方位、水平、位置、速度和加速度等信號,以便駕駛員或用自動導航儀來控制飛機、艦船或太空梭等航行體按一定的航線飛行,而在導彈、衛星運載器或空間探測火箭等航行體的制導中,則直接利用這些信號完成航行體的姿態控制和軌道控制。作為穩定器,陀螺儀器能使列車在單軌上行駛,能減小船舶在風浪中的搖擺,能使安裝在飛機或衛星上的照相機相對地面穩定等等。作為精密測試儀器,陀螺儀器能夠為地面設施、礦山隧道、地下鐵路、石油鑽探以及導彈發射井等提供準確的方位基準。由此可見,陀螺儀器的應用範圍是相當廣泛的,它在現代化的國防建設和國民經濟建設中均占重要的地位。
