理想約束
理想約束
如果作用在一力學體繫上諸約束反力在任意虛位移δr中所作的虛功之和為零,那麼這種約束叫做理想約束。理想約束的概念是從實際約束中抽象得來,它反映了相當廣泛的一些實際約束的主要性質。
作用在質點上的力(包括約束反力)在任意虛位移δ r中所作的功,叫做虛功,如果作用在一力學體繫上諸約束反力在任意虛位移中所作的虛功之和為零,即時(其中Ri是理想約束力)那麼這種約束叫做理想約束。
根據約束力作實功等於零,常見的光滑固定面約束、光滑鉸鏈、無重剛桿、不可伸長的柔索、固定鉸鏈支座、滾動支座、固定端等約束均為理想約束,現從虛功角度看,這些約束仍然為理想約束。另外,由於固定粗糙平面約束力對純滾動剛體所做的實功與虛功均為零,也可認為粗糙平面對純滾動的約束為理想約束。
光滑接觸面約束的約束反力總兩接觸面上通過接觸點的公法線方向,而質點的虛位移在接觸面過接觸點的切面上(如圖1所示)。因此,約束反力在任何虛位移中的虛功恆等於零。
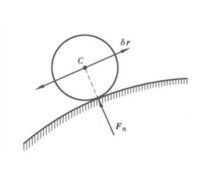
圖1 光滑接觸面約束
圖2所示為一無重剛性桿連接兩質點,A、B兩質點的約束反力沿桿軸線,大小相等,方向相反。設A、B兩質點的虛位移分別為。由於質點系的虛位移應該滿足相容條件,剛性桿不能變形,A、B兩點的虛位移在AB連線上的投影必然相等,即有: 。因此,約束反力二力在相應的虛位移上的虛功之和為零。
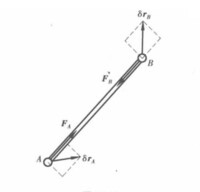
圖2 無重剛桿約束
圖3所示,剛體A、B由光滑鉸鏈連接在一起。作用在銷釘O上的約束反力大小相等,方向相反,即。顯然,此二力在銷釘O的任何虛位移上的虛功之和為零。
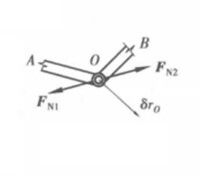
圖3 連接兩剛體的光滑鉸鏈約束
圖4所示為一單擺,單擺由一端固定,另一端系住一質點M的不可伸長的繩索組成。設繩索不可伸長,小球在繩索的約束下,可在平面內擺動。將小球視為一個質點,如果在運動中,始終滿足約束條件,繩索既不鬆弛也不蜷曲,小球在鉛垂位置時,繩子給小球的約束力(拉力),質點的虛位移必垂直於繩索拉力,為水平方向,拉力在該質點的虛位移的虛功等於零;當球擺到繩與鉛錘線成任意θ角時,繩子給小球的約束力,質點的虛位移沿小球軌跡的切線方向,仍然垂直於繩索拉力,即不可伸長的繩索拉力在質點的任何虛位移上的虛功等於零。
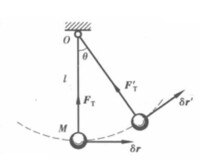
圖4 不可伸長的繩索
如圖5所示,圓輪在固定約束面上作無滑動的滾動,如果接觸面足夠剛性,可以略去滾動摩阻力偶,則當輪子作無滑動的滾動時,輪子與約束面的接觸點是輪子作平面運動的瞬心C,可以將輪子的運動看做是繞瞬心C作瞬時轉動,C點處的虛位移為零,約束輪子運動的法向力和摩擦力都通過C點,因此有: 。

圖5 無滑動的滾動
力學研究中,理想約束具有重要的意義,實例也非常多,如質點強制地沿固定光滑面的運動,質點強制地沿運動的或變形的光滑面的運動,圓球或圓盤沿完全粗糙的水平面作純滾動,兩剛體間理想光滑接觸,兩剛體間光滑鉸接,等等。經典力學和現代力學的大多數理論研究都是基於該假設的.因此具有非常重要的意義。
同時該假設的工程實際應用也是完全可能的,且實際效果也非常成功。這是因為,第一,為描述自然現象和大多數技術過程,必然要做各種各樣的假設,而理想約束這樣的假設有足夠的精確度。如複雜的機構系統可看成是剛體系統,其中剛體兩兩之間或剛性連接后鉸鏈聯結或以其表面相接觸。第二,即便系統所受約束不是理想約束.我們也可以將其作為主動力來考慮,如摩擦力作虛功,可將其歸為主動力範疇來考慮,由於未知量摩擦力的出現而缺少的方程由摩擦定律來補充。分析力學在處理約束問題上這一創造性的特點,具有重要的理論及實際意義。

基本信息
- 中文名
- 理想約束
- 外文名
- ideal constraint
- 定義
- 所有約束力所做的虛功之和為0
- 應用學科
- 理論力學
- 相關定義
- 虛功、虛位移
- 常見情況
- 光滑接觸面約束、光滑鉸鏈