柵格數據
用於測繪科學與技術領域的數據
柵(shan 一聲)格數據是按網格單元的行與列排列、具有不同灰度或顏色的陣列數據。一個優秀的壓縮數據編碼方案是:在最大限度減少計算機運算時間的基點上進行最大幅度的壓縮。
基本知識
柵格數據是按網格單元的行與列排列、具有不同灰度或顏色的陣列數據。柵格結構是大小相等分佈均勻、緊密相連的像元(網格單元)陣列來表示空間地物或現象分佈的數據組織。是最簡單、最直觀的空間數據結構,它將地球表面劃分為大小、均勻、緊密相鄰的網格陣列。每一個單元(象素)的位置由它的行列號定義,所表示的實體位置隱含在柵格行列位置中,數據組織中的每個數據表示地物或現象的非幾何屬性或指向其屬性的指針。對於柵格結構:
柵格數據
線實體由一定方向上連接成串的相鄰柵格像元表示;
面實體(區域)由具有相同屬性的相鄰柵格像元的塊集合來表示。
柵格結構的特點
數據直接記錄屬性的指針或屬性本身,而其所在位置則根據行列號轉換成相應的坐標給出。也就是說,定位是根據數據在數據集合中的位置得到的。
如圖3.1(a)所示,數據1表示屬性或編號位的一個點,其位置由所在的第3行、第5列得到。因為柵格結構是按一定的規則排列的,因此所表示的實體位置很容易隱含在網格文件的存儲結構中。在網格文件中每個代碼本身明確地代表了實體的屬性或屬性編碼,如果為屬性編碼,則該編碼可作為指向實體屬性表的指針。圖3.1 (a)中表示了代碼分別為1,3,6的實體,圖3.1 (b)表示了一條代碼為8的線實體,圖3.1 (c)表示了3個代碼分別為4,7,9的面實體。
(a) 點 (b) 線 (c) 區域
0 0 0 0 0 0 0 0 0 0 8 0 0 0 0 0 4 4 4 4 7 7 7 7
0 0 0 0 0 0 0 0 0 0 0 8 0 0 0 0 4 4 4 4 4 7 7 7
0 0 0 0 1 0 0 0 0 0 0 0 8 0 0 0 4 4 4 4 9 9 7 7
0 0 0 0 0 0 0 0 0 0 0 0 0 8 0 0 0 0 4 9 9 9 7 7
0 0 0 3 0 0 0 0 0 0 0 0 0 8 0 0 0 0 0 9 9 9 7 7
0 0 0 0 0 0 0 0 0 0 0 0 0 8 0 00 0 0 9 9 9 9 9
0 0 0 0 0 6 0 0 0 0 0 8 8 0 0 0 0 0 0 0 9 9 9 9
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 9 9 9
柵格結構是用有限的網格逼近某個圖形,因此用柵格數據表示的地表是不連續的,是近似離散的數據。柵格單元的大小決定了在一個象元所復蓋的面積範圍內地理數據的精度,網格單元越細柵格數據越精確,但如果太細則數據量太大。尤其按某種規則在象元內提取的值,如對長度、面積等的度量,主成分值、均值的求算等,其精度由象元的大小直接決定。由於柵格結構中每個代碼明確地代表了實體的屬性或屬性值,點實體在柵格結構中表示為一個象元,線實體表示為具有方向性的若干連續相鄰象元的集合,面實體由聚集在一起的相鄰象元表示,這就決定了網格行列陣列易為計算機存儲、操作、顯示與維護,因此,這種
結構易於實現,演演算法簡單,易於擴充、修改,直觀性強,特別是容易與遙感影像的聯合處理。
(一)柵格數據的獲取途徑
柵格數據的獲取主要由以下幾個途徑:
⑴ 柵格法:在待輸入的圖形上均勻劃分柵格單元,逐個柵格地決定其屬性代碼,最後形成柵格數字地圖文件。這是人工編碼,當數據量太大時,該法費工費時,工作量相當大。

柵格數據
由矢量數據向柵格數據轉換是理想的方法。
⑶掃描數字化:逐點掃描待輸入的專題地圖,對掃描數據重新採樣與再編碼,從而得到柵格數據文件。
⑷ 分類影像輸入:將經過分類解譯的遙感影像數據直接或重新採樣后輸入系統,這是高效獲取數據的方法。
(二)柵格像元代碼的確定原則
當依據一定的要求給定單位網格后,而網格中有多種地物類型(或說屬性)時,則根據需要採取如下方案之一決定柵格單元的代碼。
⑴ 中心點法:即用處於柵格中心處的地物類型(屬性或量值或屬性記錄指針)或現象特徵決定該柵格單元的代碼。對於具有連續分佈特徵的地理要素,如降水分佈、人口密度等問題,中心法是被首要選用的。
⑵ 面積佔優法:以占矩形面積最大的地物或現象特性的重要性決定柵格單元的代碼,此法常見於分類較細,地物類別斑塊較小的情況。
⑶ 長度佔優法:當復蓋的柵格過中心位置時,橫線佔據該格中的大部分長度的屬性值定為該柵格單元的代碼。
⑷ 重要性法:根據柵格內不同地物的重要性,選取最重要的地物類型決定相應的柵格單元代碼。此法常見於具有特殊意義而面積較小且不在柵格中心的地理要素。尤其是點、線狀地理要素,如城鎮、交通樞紐、交通線、河流水系等。
以上4點正確使用,則能較好地保持地表的真實性,儘可能地保持原圖或原始數據的精度問題。當然,縮小單個柵格單元面積,使每個柵格單元代表更為精細的地面矩形單元,減少混合單元、混合類型與混合面積,可大大提高量算精度,保持真實形態及更細小的地物類型。但增加柵格個數會使數據多,冗餘嚴重。為解決此問題,產生了一系列各具特色的柵格數據壓縮編碼方法。
編碼方法
在柵格文件中,每個柵格只能賦予一個唯一的屬性值,所以屬性個數的總數是柵格文件的行數乘以列數的積,而為了保證精度,柵格單元分得一般都很小,這樣需要存儲的數據量就相當大了。通常一個柵格文件的柵格單元數以萬計。但許多柵格單元與相鄰的柵格單元都具有相同的值,因此使用了各式各樣的數據編碼技術與壓縮編碼技術。主要的編碼技術簡介如下:
(一)直接柵格編碼
直接柵格編碼是將柵格數據看作一個數據短陣,逐行或逐列逐個記錄代碼。可每行從左到右逐個記錄,也可奇數行從左到右,偶數行從右到左記錄,為特定目的也可採用其它特殊順序。通常稱這種編碼的圖像文件為柵格文件,這種網格文件直觀性強,但無法採用任何種壓縮編碼方法。圖2.1 (c)的柵格編碼為:4,4,4,4,7,7,7,7;4,4,4,4,4,7,7,7;4,4,4,4,9,9,7,7;0,0,4,9,9,9,7,7;0,0,0,9,9,9,7,7;0,0,0,9,9,9,9,9;0,0,0,0,9,9,9,9;0,0,0,0,0,9,9,9。可用程序設計語言按順序文件或隨機文件記錄這些數據。
(二)鏈式編碼
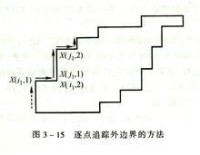
鏈式編碼又稱弗里曼鏈碼或世界鏈碼。它由某一原始點和一系列在基本方向上數字確定的單位矢量鏈。基本方向有東、東南、南、西南、西、西北、北、東北等8個,每個後繼點位於其前繼點可能的8個基本方位之一。8個基本方向的代碼可分別用0,1,2,3,4,5,6,7表示,既可按順時針也可按逆時針表示。柵格結構按逆時針編碼上圖(2)可記錄為:1,3,7,7,7,6,6,5,4。其中前兩個數字1與3表示線狀物起點的坐標,即在第一行第三列,從第三個數字起表示單位矢量的前進方向。
鏈式編碼有效地壓縮了柵格數據,尤其對多邊形的表示最為顯著,鏈式編碼還有一定的運算能力,對計算長度、面積或轉折方向的凸凹度更為方便。比較適於存儲圖形數據。但對邊界做合併和插入等修改編輯工作很難實施,而且對局部修改要改變整體結構,效率較低。
(三)遊程編碼
遊程編碼是柵格數據壓縮的重要且比較簡單的編碼方法。它的基本思路是:對於一幅柵格圖像,常有行或列方向相鄰的若干點具有相同的屬性代碼,因而可採用某種方法壓縮重複的記錄內容。方法之一是在柵格數據陣列的各行或列象元的特徵數據的代碼發生變化時,逐個記錄該代碼及相同代碼重複的個數,從而可在二維平面內實現數據的大量壓縮。另一種編碼方案是在逐行逐列記錄屬性代碼時,僅記錄下發生變化的位置和相應的代碼。圖2.1 (c)柵格結構按遊程編碼方法可記錄為:
第一行4,47,4
第二行4,57,3
第三行4,49,27,2
第四行0,24,19,37,2
第五行0,39,37,2
第六行0,39,5
第七行0,49,4
第八行0,59,3
在這個例子中,原本64個柵格數據,只用了40數值就完整地表示了出來,可見用遊程編碼方法壓縮數據是十分有效的。
遊程編碼的編碼和解碼的演演算法都比較簡單,佔用的計算機資源少,遊程編碼還易於檢索、疊加、合併等操作,在柵格單元分得更細時,數據的相關性越強,壓縮效率更高,數據量並沒有明顯增加。因此,該編碼適合微型計算機等中央處理器處理速度慢,存儲容量小的設備進行圖像處理。
(四)塊式編碼
塊式編碼是遊程編碼擴展到二維空間的情況,遊程編碼是在一維狀態記錄柵格單元的位置和屬性,如果採用正方形區域作為記錄單元,每個記錄單元包括相鄰的若干柵格,數據結構由記錄單元中左上角的柵格單元的行、列號(初始位置)和記錄單元的邊長(半徑)與記錄單元的屬性代碼三部分組成,這便是塊式編碼。因此可以說,遊程編碼是塊式編碼的特殊情況,塊式編碼是遊程編碼的一般形式。圖2.1 (c)表示的柵格結構按塊式編碼方法可記錄為:
(1,1,3,4),(1,4,1,4),(1,5,1,7),(1,6,2,7),(1,8,1,7);
(2,4,1,4),(2,5,1,4),(2,8,1,7);
(3,4,1,4),(3,5,2,9),(3,7,2,7);
(4,1,2,0),(4,3,1,4),(4,4,1,9);
(5,3,1,0),(5,4,2,9),(5,6,1,9),(5,7,1,7),(5,8,1,7);
(6,1,3,0),(6,6,3,9);
(7,4,1,0),(7,5,1,9),
(8,4,1,0),(8,5,1,0)。
從以上論述的塊式編碼的編碼原理可知,一個記錄單元所表示的地理數據相關性越強,也即記錄單元包含的正方形邊長越長,壓縮效率越高。而地理數據相關性差時,也即多邊形邊界碎雜時,塊式編碼的效果較差。
塊式編碼的運算能力弱,必要時其編碼的柵格數據須通過解碼轉換成柵格矩陣編碼的數據形式才能順利進行。塊式編碼在圖像合併、插入、面積計算等功能方面較強。
(五)四叉樹數據結構

柵格數據結構
這個倒向樹狀的圖中“○”表示可繼續分割的方形區域;“□”表示具有同類屬性的方形區域;“■”表示不能再分的單個(最小)象元柵格,即所謂的樹葉,樹葉表示的是具有單一類型的地物或是符合既定要求的少數幾種地物,可以在任意層上。
通過以上對四叉樹結構的分析,可發現它有以下特點:
⑴ 存儲空間小:因為記錄的基本單位是塊,不是象素點,因此大大地節省了存儲空間。
⑵ 運算速度快:因為四叉樹結構的圖形操作是在數上進行的,比直接在圖上運算要快得多。
⑶ 柵格陣列各部分的解析度可變:不需要表示許多細節的地方,分級較少,因而解析度低;邊界複雜的地方分級較多,解析度高,因而在減少數據量的基礎上滿足了數據精度。
⑷ 容易有效地計算多邊形的數量特徵。
⑸ 與柵格結構之間的轉換,比其它壓縮方法容易。
⑹ 四叉樹編碼表示多邊形中嵌套其它屬性的多邊形時比較方便:它允許多邊形嵌套多邊形的結構,是非常實用的、重要的特點,這點深深得到地理信息系統數據編碼設計者的青睞。
⑺ 四叉樹編碼的不足之處是:轉換具有不確定性,對大小相等形狀相同的多邊形,不同人可能分解為不同的四叉樹結構,因而不利於形狀分析和模式識別。四叉樹編碼處理結構單調的圖形區域比較適合,壓縮效果好,但對具有複雜結構的圖形區域,壓縮效率會受到很大影響。
(六)八叉樹與十六叉樹結構
前面的數據結構都是基於二維的,在相當多的情況下,如地下資源埋藏、地下溶洞的空間分佈,二維的坐標體系根本無法表達。因此需要有三維數據結構,如果考慮空間目標隨時間變化,那還需要4維數據結構。較好的表達三維與四維結構是在四叉樹基礎上發展起來的八叉樹(三維)和十六叉樹(四維)。
是將空間區域不斷地劃分為八個同樣大小的子區域,
(七)各種編碼的比較分析
比較以上各種編碼,可得出如下主要結論:
⑴ 直接柵格編碼直觀簡單,但數據出現大量冗餘;
⑵ 鏈式編碼對邊界的運算方便,壓縮效果好,但區域運算較困難;
⑷ 塊式編碼在圖像合併、插入、面積計算等功能方面較強,當所表示的地理數據相關性強時,壓縮效率相當高;但地理數據相關性差時,塊式編碼的效果較差,而且塊式編碼的運算能力較弱;
⑸ 四叉樹編碼運算速度快,存儲空間小,解析度可變,壓縮效率高,但其轉換具有不確定性,難以形成統一演演算法。
數據結構更加簡單,即由像元組成矩陣結構,其中的像元值表示坐標,有時與屬性表相關聯
格式更加強大,可進行高級的空間和統計分析
可以表示連續表面以及執行表面分析
點、線、面和表面都可同樣存儲
對複雜數據集也可執行快速疊置
要將數據存儲為柵格還需要考慮其他因素,有時選擇基於矢量的存儲方法反而會更合適。例如:
由於柵格數據集的像元尺寸具有局限性,所以可能會帶來空間誤差。
柵格數據集可能會非常大。雖然解析度會隨著柵格像元大小的減小而提高,但這會佔用更多的磁碟空間,而且會拖慢處理速度。對於給定區域,將柵格像元大小更改為現有大小的一半時,所需的存儲空間會增大為原來的四倍,具體情況取決於所使用的數據類型和存儲技術。
將數據重建到固定間距的柵格像元邊界時也會損失一定的精度。
柵格數據模型:格網、柵格地圖、表面復蓋或影像
格網由行、列和格網單元組成,行、列由格網左上角起始,行方向作為y坐標,列方向作為x坐標格網單元由其行列位置定義。柵格數據用單個格網單元代表點,用一系列相鄰格網單元代表線,鄰接格網的集合代表面,每個格網單元有一個值,整型(表示類別數據,如土地利用類型)或浮點型(表示連續數據,如降水量)。格網中的每一個單元值代表了由此行此列決定的該位置上空間現象的特徵,柵格數據模型不把空間數據與屬性數據明確分開,資料庫管理用處不大。格網單元大小決定了柵格數據模型的解析度;大尺寸網格單元無法表示空間要素的精確位置,較小的網格單元則增大數據量和數據處理時間。
衛星影像
遙感衛星影像是用柵格格式記錄,從1972年以來產生全球影像
美國陸地衛星1、2、3號:通過多光譜掃描儀(MSS)獲取影像,空間解析度約為79m
陸地衛星4號:發射與1982年,用專題製圖儀(TM)掃描儀,空間解析度為30m
1984年第二個TM式陸地衛星5在國外發射,1993年發射陸地衛星6未進入軌道
1999年發射陸地衛星7號(ETM1),設計用來季節性監控全球範圍內小尺度變化過程,空間解析度為30m
法國地球觀測衛星(SPOT)系列始於1986年,每個SPOT衛星帶有兩個感測器:全感應感測器獲取10m空間解析度的單波段影像,多光譜感測器獲取三個波段20m解析度影像,為GIS項目的良好空間數據源
印度、日本衛星計劃
1985年美國陸地衛星私有化,私人公司可收集與銷售遙感數據
SpaceImaging:Ikonos衛星用來獲取1m解析度的全色影像和4m解析度的多光譜影像
衛星影像像元值代表從地球表面反射或發射的光能,光能的測量基於來自連續波長的光譜波段,即電磁光譜
全色影像包含一個波段,而多光譜影像包含了一系列波段,例如TM影像有7個波段:藍、綠、紅、近紅外、中紅外I、熱紅外、中紅外II
數字高程模型(DEM)由等間隔海拔數據排列組成;DEM以點為基礎,但也容易通過將海拔高度點置於格網單元中心的方法轉換成柵格數據
(1)美國地質調查局(USGS)的DEM:7.5秒DEM(1:24000),
30秒DEM(1:100000)、1分DEM(1:250000)、阿拉斯加DEM
(2)非USGS數字高程模型
基本方法:採用立體測圖儀和具有重疊區的航片,產出比USGS精度更高的DEM數據,但費用太高。
其他方法:用衛星影像生成DEM模型,如SPOT數據
(3)全球數字高程模型
GTOPO30、ETOPO
數字正射影像
數字正射影像圖(DOQ)是一種由航片或其他遙感數據製備而得到的數字化影像,其中由照相機鏡頭傾斜和地形
起伏引起的位移已被消除;數字正射影像是地理坐標參考的,並可與地形圖和其他地圖配准
二進位掃描文件
含有數值1或數值0,用於跟蹤矢量化
數字柵格圖形
是USGS地形圖的掃描圖像
圖形文件
TIFF、GIF、JPEG
特定GIS軟體的柵格數據
總結
不論任何形式的壓縮數據編碼,都是以增加了運算時間換取了存儲空間,這就要考慮主要矛盾的主要方面,當我們想減少數據的冗餘,有效地利用空間資源時,就不得不進行數據壓縮編碼,而讓計算機多進行一些解碼和處理複雜圖形的運算。因此,一個優秀的壓縮數據編碼方案是:在最大限度減少計算機運算時間的基點上進行最大幅度的壓縮。