微機械陀螺儀
微機械陀螺儀
微機械MEMS是英文Micro Electro Mechanical systems的縮寫,即微電子機械系統。微電子機械系統(MEMS)技術是建立在微米/納米技術(micro/nanotechnology)基礎上的 21世紀前沿技術,是指對微米/納米材料進行設計、加工、製造、測量和控制的技術。它可將機械構件、光學系統、驅動部件、電控系統集成為一個整體單元的微型系統。這種微電子機械系統不僅能夠採集、處理與發送信息或指令,還能夠按照所獲取的信息自主地或根據外部的指令採取行動。它用微電子技術和微加工技術(包括硅體微加工、硅表面微加工、LIGA和晶片鍵合等技術)相結合的製造工藝,製造出各種性能優異、價格低廉、微型化的感測器、執行器、驅動器和微系統。微電子機械系統(MEMS)是近年來發展起來的一種新型多學科交叉的技術,該技術將對未來人類生活產生革命性的影響。它涉及機械、電子、化學、物理、光學、生物、材料等多學科。
微機械陀螺儀(MEMS gyroscope)的工作原理 傳統的陀螺儀主要是利用角動量守恆原理,因此它主要是一個不停轉動的物體,它的轉軸指向不隨承載它的支架的旋轉而變化。但是微機械陀螺儀的工作原理不是這樣的,因為要用微機械技術在矽片襯底上加工出一個可轉動的結構可不是一件容易的事。微機械陀螺儀利用科里奧利力——旋轉物體在有徑向運動時所受到的切向力。下面是導出科里奧利力的方法。有力學知識的讀者應該不難理解。
在空間設立動態坐標系(圖一)。用以下方程計算加速度可以得到三項,分別來自徑向加速、科里奧利加速度和切向加速度。
科里奧利力
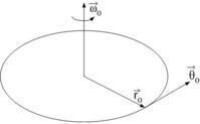
動態坐標系
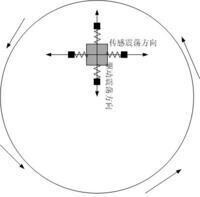
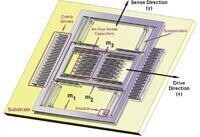
如果物體在圓盤上沒有徑向運動,科里奧利力就不會產生。因此,在MEMS陀螺儀的設計上,這個物體被驅動,不停地來回做徑向運動或者震蕩,與此對應的科里奧利力就是不停地在橫向來回變化,並有可能使物體在橫向作微小震蕩,相位正好與驅動力差90度。(圖二)MEMS陀螺儀通常有兩個方向的可移動電容板。徑向的電容板加震蕩電壓迫使物體作徑向運動(有點像加速度計中的自測試模式),橫向的電容板測量由於橫向科里奧利運動帶來的電容變化(就像加速度計測量加速度)。因為科里奧利力正比於角速度,所以由電容的變化可以計算出角速度。
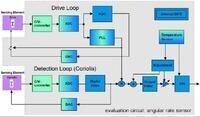
BOSCH SMG 070原理圖
微機械陀螺儀的設計和工作原理可能各種各樣,但是公開的微機械陀螺儀均採用振動物體感測角速度的概念。利用振動來誘導和探測科里奧利力而設計的微機械陀螺儀沒有旋轉部件、不需要軸承,已被證明可以用微機械加工技術大批量生產。
絕大多數微機械陀螺儀依賴於由相互正交的振動和轉動引起的交變科里奧利力。振動物體被柔軟的彈性結構懸掛在基底之上。整體動力學系統是二維彈性阻尼系統,在這個系統中振動和轉動誘導的科里奧利力把正比於角速度的能量轉移到感測模式。
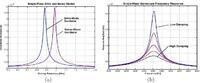
驅動和感應的頻寬
(圖五)
一般的微機械陀螺儀由梳子結構的驅動部分(圖六)和電容板形狀的感測部分組成(圖八)。有的設計還帶有去驅動和感測耦合的結構。(圖九)
感測耦合的結構
MEMS陀螺儀的重要參數包括:解析度(Resolution)、零角速度輸出(零位輸出)、靈敏度(Sensitivity)和測量範圍。這些參數是評判MEMS陀螺儀性能好壞的重要標誌,同時也決定陀螺儀的應用環境。
解析度是指陀螺儀能檢測的最小角速度,該參數與零角速度輸出其實是由陀螺儀的白雜訊決定。這三個參數主要說明了該陀螺儀的內部性能和抗干擾能力。對使用者而言,靈敏度更具有實際的選擇意義。測量範圍是指陀螺儀能夠測量的最大角速度。不同的應用場合對陀螺儀的各種性能指標有不同的要求。
單軸和雙軸MEMS角速度感測器(陀螺感測器)新產品群。該系列主要用於遊戲機、輸入設備、導航儀、PND(Portable Navigation Device)及數碼相機等。
單軸產品可檢測偏擺方向。雙軸產品備有可檢測俯仰方向及滾轉方向的品種,以及可檢測俯仰方向及偏擺方向的品種。可檢測的角速度因品種而異,最大為30~6000度/秒。輸出為模擬信號。各產品備有對各軸信號進行1倍(無放大)輸出和放大至4倍的兩個埠。降低了溫度誤差以及隨時間變化的誤差。零點溫度漂移為0.05度/秒/℃。雜訊方面,可檢測的角速度為最大30度/秒的品種控制在了0.014度/秒/。
電源電壓範圍為+2.7~3.6V。封裝採用5mm×5mm×1.5mm的16端子LGA。工作溫度範圍為-40~+85℃。
根據近幾年國內文獻,目前我國在慣性導航中應用研究中的陀螺儀按結構構成大致可以分為三類:機械陀螺儀,光學陀螺儀,微機械陀螺儀。機械陀螺儀指利用高速轉子的轉軸穩定性來測量載體正確方位的角感測器。自 1910 年首次用於船載指北陀螺羅經以來,人們探索過很多種機械陀螺儀,液浮陀螺、動力調諧陀螺和靜電陀螺是技術成熟的三種剛體轉子陀螺儀,精度在 10E-6 度/小時~10E-4 度/小時範圍內,達到了精密儀器領域內的高技術水平。在 1965 年,我國的清華大學首先開始研製靜電陀螺,應用背景是“高精度船用 INS”。 1967-1990,清華大學、常州航海儀器廠、上海交通大學等合作研製成功了靜電陀螺工程樣機,其零偏漂移誤差小於,隨機漂移誤差小於,中國和美國、俄羅斯並列成為世界上掌握靜電陀螺技術的國家。隨著光電技術的發展,激光陀螺,光纖陀螺應運而生。與激光陀螺儀相比較,光纖陀螺儀成本較低,比較適合批量生產。我國光纖陀螺的研究起步較晚,但已經 取得了很多可喜的成績。航天科工集團、航天科技集團、浙大、北方交大、北航等 單位相繼開展了光纖陀螺的研究。根據目前掌握的信息看,國內的光纖陀螺研製精 度已經達到了慣導系統的中低精度要求,有些技術甚至達到了國外同類產品的水平。從 20 世紀開始,由於電子技術和微機械加工技術的發展,使微機電陀螺成為現實。從 20 世紀 90年代以來,微機電陀螺已經在民用產品上得到了廣泛的應用,部分應用在低精度 的慣性導航產品中。我國微機電陀螺的研究開始於 1989 年,現在已經研製出數百 微米大小的靜電電機和3mm的壓電電機。清華大學的導航與控制教研組的陀螺技術十分成熟,並已經掌握微機械與光波導陀螺技術,現已經做出了微型陀螺儀樣機,並取得了一些數據。東南大學精密儀器與機械系科學研究中心也不斷進行關鍵部件、微機械陀螺儀和新型慣性裝置與GPS 組合導航系統的開發研究,滿足了軍民兩用市場的需要。總之,隨著科學技術的發展,相比於靜電陀螺的高成本,成本較低的光纖陀螺和微機械陀螺的精度越來越高,是未來陀螺技術的發展總趨勢。
微機械陀螺儀用於測量汽車的旋轉速度(轉彎或者打滾),它與低加速度計一起構成主動控制系統。所謂主動控制系統就是一旦發現汽車的狀態異常,系統在車禍尚未發生時及時糾正這個異常狀態或者正確應對個異常狀態以阻止車禍的發生。比如在轉彎時,系統通過陀螺儀測量角速度就知道方向盤打得過多還是不夠,主動在內側或者外側車輪上加上適當的剎車以防止汽車脫離車道。現在這種系統主要安裝於高端汽車上。
目前在汽車MEMS市場,壓力計和加速度計還是占較大份額,(圖十四)但是隨著對汽車安全性能要求越來越高,尤其是在北美和歐洲穩定性主控系統的安裝率節節攀升,陀螺儀的市場增長率明顯比前兩類要快,在2011年預期達到10%。

基本信息
- 中文名
- 微機械陀螺儀
- 外文名
- Micro Electro Mechanical systems
- 縮寫
- MEMS
- 類別
- 微電子機械系統