定天鏡
將太陽光反射到恆定方向的裝置
定天鏡
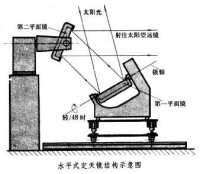
觀測時,由電機驅動,鏡面以48小時一轉的均勻速度與太陽視運動同方向轉動,便可將太陽光反射到某一固定方向,由第二平面鏡截獲,再將光線反射到水平(或垂直向下)的方向,然後進入水平式(或塔式)太陽望遠鏡中。
第二平面鏡通常採用地平式裝置,分別繞兩根互相垂直的軸作微調轉動,以改正跟蹤過程中太陽像的偏離。為了適應太陽赤緯的周年變化,避免在一天中出現定天鏡上太陽光入射角過大(一般不超過45°),以及出現第二平面鏡裝置擋住射向定天鏡的光的情況,定天鏡和第二平面鏡之間應當能作相對運動。

定天鏡
此外,結構分散,不能安置在真空系統中,也就不能避免自身產生的熱空氣湍流對成像的不良影響。

定天鏡
一、定天鏡的定位根據干涉的要求,兩面或多面定天鏡要同時指向並跟蹤同一天體,其誤差不超過±5(星光方向,定天鏡的法線方向為它的一半)。以步進電機作為驅動部件,用級的感應同步器和1級的數顯表作為位置閉環檢測器件。這個方案比採用光碼盤的方案要節省80-"90的經費。為了滿足光干涉要求振動小,驅動定天鏡的步距要儘可能地小,比如小於0.05,以便在跟蹤天體時,波前方向的改變小於0.1/對普通國產步進電機步距為1.5。的實際情況來說,要將其步距減小至0.05,傳輸比要高達108。這麼大的倍數僅靠機械減速是不可能的,因此要求對步進馬達的步距進行電細分。如果能電細分到64倍,再加上2000倍的機械傳輸比,就可以滿足上述要求。
如果能電細分到128倍,則步距可小到0.02,這是最理想的情況(將來電細分能達到256倍時,機械傳輸比只要求1000就夠了)。件,在指定時刻之前,將定天鏡法線對向天空某個方向,以使待測天體的光線反射到某個固定方向,定天鏡法線方向和待測天體方向之間的關係,可由天文三角形求得,假定在某個時刻天體的方位角和高度分別為和,其所對應的定天鏡法線方向的方位和高度分假定儀器法線的當前位置為則差值(一)和(一。)的符號給出了儀器轉動方向,絕對值大小將決定轉動的最大速度。為了使儀器運轉平穩,定位精確,決定採用分級升速,降速的辦法。比如△,△大於10。時,升到最高速(如2。/)運轉,△,△小於0。時,用次高速(如。/)運轉。為了及時地減速,儀器開始加速之後,控制機每50查詢一次儀器的當前位置,並和目的位置,進行比較得△,△。為了使儀器能準確而叉平穩地停在預期位置而不發生振蕩,可根據△,△的大小設置幾級速度,比如,△小於2。時,改為0。5。/的低速,當△,△小於0.5。時,改為0/盼慢速,△,△小於,改為20/的跟蹤速度,直到△,△為零時停轉。
實踐證明用這種逐級升降速的辦法,能有效地避免儀器衝過頭,可一次定位成功。以上所有的控制軟體都 存放在一個控制單片機之內。 二,觀測時的跟蹤定天鏡的定位,是用上述的驅動和檢測部上一節介紹了如何使儀器在開始觀測之前收稿日期:1991—03—1265第4卷天文文獻情報對向預定的位置。而在觀測開始時,儀器應跟隨恆星而動。由於採用地平式的定天鏡,定天鏡的法線位置和速度已經完全不同於待測天體的位置和速度,前者可由後者計算出來。根據計算結果,在被測天體的天頂距≤45。的正常第2--3期觀測條件下。如果每秒鐘刷新一次位置和速度,方位上的累積誤差小於0.005,高度上的累積誤差小於。0.01。因而只要每秒鐘刷新一次定天鏡法線的位置和速度即可。跟蹤的計算分以下幾步:在最後一步的計算中,還要加上大氣折射改正,根據觀測時的氣溫,氣匱等參數隨時計算。在驅動時,根據--5達的實際步距,將,一1-_+一,轉換成頻率輸出給步進馬達,為防止可能的丟失,位置讀數的反饋可用於檢查並及時補償(增加或減少送給馬達的詠沖數)可能出現的情況。
二,觀測時的跟蹤定天鏡的定位,是用上述的驅動和檢測部上一節介紹了如何使儀器在開始觀測之前收稿日期:1991—03—1265第4卷天文文獻情報對向預定的位置。而在觀測開始時,儀器應跟隨恆星而動。由於採用地平式的定天鏡,定天鏡的法線位置和速度已經完全不同於待測天體的位置和速度,前者可由後者計算出來。根據計算結果,在被測天體的天頂距≤45。的正常第2--3期觀測條件下。如果每秒鐘刷新一次位置和速度,方位上的累積誤差小於0.005,高度上的累積誤差小於。0.01。因而只要每秒鐘刷新一次定天鏡法線的位置和速度即可。跟蹤的計算分以下幾步:在最後一步的計算中,還要加上大氣折射改正,根據觀測時的氣溫,氣匱等參數隨時計算。在驅動時,根據--5達的實際步距,將,一1-_+一,轉換成頻率輸出給步進馬達,為防止可能的丟失,位置讀數的反饋可用於檢查並及時補償(增加或減少送給馬達的詠沖數)可能出現的情況。
定天鏡
三,與組成閉環系統為了彌補跟蹤時可能出現的丟步,以及更主要的是為了改正大氣湍流對波前傾斜的影響,每一臂光路中都有一面由驅動的傾斜鏡,其調節範圍約為±25(每個方向)。定天鏡除了按上述計算飢給定的位置和速度運動外,它的另一個功能是保持傾斜鏡在它工作範圍的中央,即如果在一個或兩個方向超出了它的中央範圍±5,就將此信息送給定天鏡的控制機,使定天鏡在一個或兩個坐標上做相應的轉動,從而傾斜鏡又回到了它的中央範圍之內。這裡可以看出,定天鏡迴路中有兩個閉合系統:位置盤和的閉合。為了防止兩個系統之間可能出現的。推挽現象,這兩個閉環系統之一應享有優先權,再附加上一些判斷條件之後,兩者便能協調地工作。

定天鏡
通過太陽塔的觀測,已獲得大量太陽活動(耀斑、日珥、黑子等)的光譜資料。利用這些資料已取得了一系列重要成果:項目“太陽活動22周觀測和研究”獲教育部科技進步一等獎(1995)和國家自然科學三等獎(1997),“太陽耀斑光譜診斷和日冕物質拋射物理機制的研究”獲教育部自然科學一等獎(2004)。

方成院士

基本信息
- 外文名
- coelostat