多普勒導航雷達
多普勒導航雷達
目錄
利用多普勒效應測量飛機飛行速度的機載導航雷達,與機上航向設備、導航計算機等組成自主式航位推算多普勒導航系統。多普勒效應用於飛機導航的研究開始於1945年末。隨後,美國研製出第一個多普勒導航系統AN/APN-66 。後來很多國家也相繼開展多普勒雷達的研製工作。50年代,研製和生產出多種類型和用途的多普勒導航雷達。60年代,多普勒導航雷達在理論、技術和應用上趨於成熟。此後,主要工作是使設備減輕重量、小型化和多功能,提高可靠性和同其他設備組合使用。
多普勒導航雷達
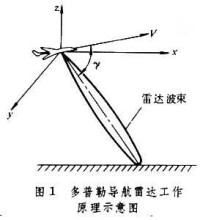
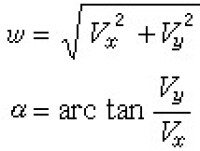
已知飛機的俯仰角θ、側滾角ζ時,在圖1的地平坐標系中可把V分解成沿坐標軸x、y、z的三個速度分量Vx、Vy、Vz。僅由上式不能解算出這三個速度分量。至少須有三個波束,測出三個獨立的多普勒頻率fd1、fd2、fd3,才能解算出Vx、Vy、Vz。這樣,可分別求出飛機的地速w和偏流角α
多普勒導航雷達
類型 多普勒導航雷達的載波調製方式可分為簡單連續波方式、窄脈衝調製方式、間斷連續波方式、正弦調頻連續波方式和偽隨機碼移頻鍵控方式。調製方式對多普勒導航雷達的性能有很大影響,如能否測量零速度、負速度、垂直速度,能否測高,以及雷達的最低工作高度和最高工作高度,適應機動飛機的能力,雷達的體積和重量等。不同調製方式的多普勒導航雷達各有優缺點。
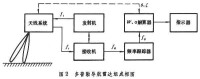
多普勒導航雷達天線有兩種安裝方式。一種是將天線安裝在平台上,平台伺服系統使天線平面與地面保持平行。偏流角伺服系統使天線在平台平面內轉動,對偏流角進行跟蹤,天線縱軸與平台縱軸間的夾角即為偏流角。把來自天線前左(右)、后右(左)兩波束接收的回波相互差拍,得到多普勒頻率,它正比於地速。這種安裝方式用於窄脈衝調製多普勒導航雷達。另一種是將天線固聯在飛機機體上。這時發射機向接收機提供穩定的相干本地振蕩,與天線接收的回波進行差拍,得到多普勒頻率。根據測出的多個多普勒頻率,結合飛機的俯仰、側滾數據,解算出地速和偏流角。這種安裝方式通常用於除窄脈衝調製方式以外的其他調製方式的多普勒導航雷達。這種雷達能測量零速、負速和垂直速度。為了求解飛機的三個速度分量,雷達天線至少產生三個波束,但當已知飛機的攻角時,也可使用雙波束天線。雙波束採用V形配置。三個或三個以上的波束通常採用Y形或X形配置。窄脈衝調製雷達採用X形波束配置。

基本信息
- 應用
- 機上航向設備
- 類型
- 機載導航雷達