共找到34條詞條名為ACE的結果 展開
ACE
區域控制偏差
區域控制誤差即常規區域控制誤差(ACE),只考慮頻率變化和交換功率變化,修正後的ACE還考慮了能量誤差和時間誤差,它們是因裝置和調度存在偏差而導致的。利用MATLAB分別對雙區域和三區域聯合系統中的每個區域中的頻率變化和功率變化進行模擬,結果表明,採用修正後的區域控制誤差控制下的頻率變化和功率變化要比未修正的控制性能好。其計算公式為:ACE=聯絡線功率交換誤差+頻率偏差乘以偏差係數。衡量某區域內發電和負荷的標準。
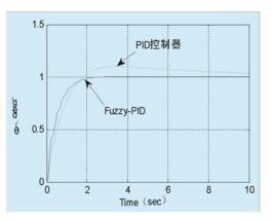
區域控制誤差是指對擾動負荷及聯絡線控制中的區域控制誤差進行深入研究。研究對象分為兩部分,一是擾動負荷下的區域控制誤差性能研究,另一是聯絡線控制中的區域控制誤差性能研究。針對聯合系統中各個區域調節裝置存在誤差,導致頻率和交換功率波動,從而引起時間誤差與能量誤差,研究對區域控制誤差的演演算法作了改進。考慮到出力調節速率約束或系統參數改變對控制效果的影響,進一步採用模糊神經網路對系統加以控制。為了減少模糊神經網路的模糊標記數,研究通過自組織神經網路對模糊神經網路的模糊標記數進行競爭訓練,從而獲得簡化網路。
常規的區域控制偏差(ACE)控制方法為,自動發電控制(AGC)系統根據ACE大小對可控機組發出控制命令,使本地控制區域ACE的考核指標CPS1、CPS2滿足控制性能標準(CPS)標準。從時間上看,這是一個滯后校正的過程。將大量的功率用於滯后校正不利於安全和經濟運行,並且參與校正的大都是有秒級調節能力的優質水電AGC機組,對大多數省網來說,這種機組是比較稀缺的。為此,有學者提出以數分鐘為周期,基於超短期負荷預報,超前調節ACE以提高CPS指標。常用的方法有2種:一種是默認水電AGC機組滯后校正ACE,火電AGC機組基於負荷預報超前控制ACE;另一種是以全部AGC機組超前控制ACE,或指定某些AGC機組參與超前控制ACE。這2種方法有利於ACE控制,但依然存在以下值得探討的問題。
1)控制目標。常規超前控制ACE的控制目標是總發電量等於超短期負荷預報值,但超短期負荷預報沒有考慮負荷功頻特性的作用。例如在預測考慮的時間段T內,系統頻率f=49Hz,顯然此時實測負荷P小於在50 Hz下的理想負荷值,若以此值作為負荷數據進行預測來指導發電,則系統頻率差不能被正確彌補。並且,常規的超短期負荷預測一般不考慮網損。
2)與非AGC機組協調。在實際系統中,非AGC機組制定機組計劃和機組響應指令的周期都較長,往往不能完全執行發電計劃,統計表明其實際出力和計劃之間一般會存在5%左右的偏差。產生偏差的原因可能包括負荷預測誤差、人工干預計劃、電廠的投機行為等。而在現有文獻中,制定超前控制AGC策略時,一般默認其非AGC機組的發電計劃被完全執行。
針對上述問題,從在線有功調度的整體流程出發,沿時間維度系統地看待問題,針對調度過程中長、短周期機組特性的不同,提出利用協調AGC機組合理分配發電功率,超前控制ACE的方法。
計劃機組的出力根據日前計劃或滾動計劃進行調整,對機組性能沒有特殊要求;AGC機組按傳統方式對ACE進行滯后校正,要求機組有秒級響應能力,一般由水電AGC機組組成;CAGC機組一方面負責在較短的周期內超前控制ACE,另一方面基於計劃機組的出力為AGC機組提供容量支持。CAGC機組的性能要求為具備分鐘級的響應周期和用於傳輸調度指令的信息通道,主要包括火電AGC機組和一些不參與實時校正控制的水電機組。
通過CAGC機組協調,在不干涉計劃機組運行的條件下,將目標時刻的發電需求在AGC機組與CAGC機組之間合理分配,達到既超前控制ACE又在容量上支持AGC機組的目的,因此,問題的關鍵是確定目標時刻的發電需求和計劃機組的出力偏差,進而確定協調AGC機組的超前控制量。首先給出目標時刻本地控制區的理想總發電模型;然後考慮計劃機組可能產生的計劃與出力的偏差,預測計劃機組目標時刻的可能出力;進而綜合考慮總發電、計劃機組發電和AGC機組的希望運行點,計算出目標時刻協調AGC機組的總出力;最後通過一個優化模型把協調AGC機組的總出力分配到各協調AGC機組上。
計劃機組按照預定的發電計劃調整發電,但其實際出力與發電計劃之間會有一定的偏差,主要原因是:1)調度員的臨時調節。某些特殊運行狀態下,如即將發生考核時、斷面臨近越限時等,調度員會臨時改變機組計劃。2)機組不跟蹤計劃。由於機組自身性能、通道問題及電廠的投機行為等原因,機組運行往往會偏離計劃。這些因素都是持續性的,因為臨時調度決策和電廠投機行為必須持續一段時間才有效,機組性能和通道等問題也很少是瞬時事件,因此,可使用線性外推法進行計劃機組的發電預估。
多時間尺度協調的ACE超前控制方法以滿足目標時刻控制區理想總發電為控制目標,在機組分類、負荷分解和計劃機組出力偏差預估的基礎上,通過CAGC機組的協調控制,使各時間尺度上的機組協調優化運行,既可以保證系統的安全經濟運行,又可以保證AGC機組有合理的備用容量,提高系統的CPS指標,利於節能減排。針對該方法開發的控制程序已經過現場實際測試並得到認可。
2009年11月10日巴西電網大停電事故再次為互聯電網頻率控制敲響了警鐘。隨著華東電網外受電電力的不斷增加,大受端電網特徵越發明顯,仍然採用手動修改調度計劃的方法顯然不能滿足外來大功率缺失情況下華東電網頻率的快速恢復。為了提高華東電網抵禦大功率失卻后的恢復能力,更有效地發揮全網備用共享的潛能,在採用引進北美電力可靠性委員會(NERC)的頻率考核辦法后,華東電網根據自身特點和需求,提出了動態區域控制誤差(ACE)。
華東電網動態ACE實施的目的是:當華東電網大功率區外來電失去或大功率機組跳閘時,以備用共享為原則,使各省市能合理地分擔備用義務,有依據地調集備用支援電網的頻率恢復。
華東電網於2001年10月推行控制性能標準(CPS,包括CPS1和CPS2)考核指標對省市聯絡線進行考核。隨著電力供需矛盾趨緩,於2009年1月推行擾動控制標準(DCS)考核指標,客觀評價和考核華東電網各省市運行備用的預留、調用和恢復情況,確保功率缺失擾動的快速準確處理。自2009年8月1日起實施動態ACE,進一步完善了頻率控制考核體系。
但是,雖然動態ACE可以較好地解決全網備用共享、頻率快速恢復等問題,但仍然存在需要改進之處。本文闡述了動態ACE的內容及特點,並基於動態ACE分析了其有待進一步研究和完善的問題。
1997年起,為更加客觀地評價各控制區的控制行為對互聯電網的作用,NERC提出了控制性能標準CPS1和CPS2來替代A1和A2標準,以DCS替代B1和B2標準。1998年後,NERC提出各控制區要滿足CPS1大於100%和CPS2大於90%的要求。NERC頒布的DCS主要是確保控制區能利用事故備用來平衡區域的電源損失,使互聯區域的頻率控制在規定的範圍內。
CPS和DCS考核都是基於ACE的互聯電網控制考核標準,實行這些標準的目的是為完善電網頻率控制考核機制,促進各控制區域提高頻率控制水平,提高互聯電網的頻率質量和抵禦頻率事故的能力。但是,隨著500 kV龍政直流(3000 MW)、宜華直流(3000 MW)的相繼投產,高峰時段華東互聯電網從外區受入的電力高達7200 MW,達到華東電網2009年夏季高峰負荷的5%,任一外區直流故障或相繼故障必將引發華東電網頻率的大幅下降。當互聯電網發生大的頻率擾動初期(2 min內),系統頻率的恢復完全依靠系統頻率一、二次調節,互聯電網內所有機組的自動發電控制(AGC)均根據本控制區域的ACE情況動作。
綜上所述,依靠手動修改計劃對互聯電網的頻率恢復將會造成以下幾方面的不利影響:①電網頻率恢復緩慢,沒有發揮全網備用共享的作用;②電網承受連續頻率擾動能力下降,頻率越限可能性上升;③在臟數據時段CPS和DCS無法合理考核各控制區域頻率調節能力;④CPS和DCS考核促進各控制區提高頻率調節能力的效用被削弱。
動態ACE優化了備用共享,緩解了P修改前ACE臟數據問題。但是,因為動態ACE是按照各控制區承擔的旋轉備用比例分攤,而修改後的P按照外受電分配比例分攤,儘管對於互聯電網來說總量是相等的,對於單個控制區卻是不等的,除非其旋轉備用承擔比例正好等於外受電分配比例。
動態ACE動作條件不但檢測外受直流電力,還檢測華東網調直接調整調度計劃機組。因這些機組單台容量較大且都為跨省市輸電機組,每個控制區都有一定的分配比例,機組跳閘后也必須依靠調度員手動修改各控制區的P,所以當這些機組發生事故跳閘時,同樣存在頻率大幅下降和ACE臟數據問題。
這些機組的容量相比單極直流容量有一定差距(直流單極1500 MW,機組單機最大756 MW),所以單機跳閘時對頻率的擾動小於外受電直流跳閘,跳閘后缺失的功率小於省市規定的旋轉備用容量,故可分以下3種情況:
1)未達到頻率閾值,無論頻率變化率是否滿足給定條件。這種方式下為了完全消除ACE臟數據問題,機組跳閘后的功率缺額分配比例按照日計劃分配比例實行。
2)達到頻率閾值,無論頻率變化率是否滿足給定條件。這種情況下往往發生了多重故障,為了快速恢復頻率,宜最大限度地發揮全網備用共享的作用,所以執行旋轉備用分配比例。
3)大機組甩負荷試驗:機組進行計劃甩負荷試驗前,網調必定已經留出響應的旋轉備用,填補機組甩負荷后的功率缺額,所以正常情況下動態ACE不應觸發,在全網分攤機組功率缺額。但為了防止在機組甩負荷的同時發生其他機組或外受電失卻引發的頻率事故,此時不宜將動態ACE退出。所以,在這種情況下,應適當降低頻率閾值fint(正常情況為49.95 Hz),將頻率閾值調整至正常情況下單機甩負荷試驗不會越過的頻率49.90 Hz。這樣既可以使正常情況下動態ACE不觸發,也可以保障同時發生其他故障時動態ACE可靠觸發。
以上所有討論都基於一個假設:實行動態ACE前後各控制區間的聯絡線均在穩定限額內,但實際情況往往並非如此。在正常運行狀態下,某些聯絡線的安全穩定裕量很小,僅能滿足一定額度的功率增加。所以,動態ACE觸發可能會造成某條(些)聯絡線功率超過其安全穩定極限而跳閘,而這會加劇該控制區域的功率缺額,從而引發連鎖跳閘,造成系統崩潰。動態ACE的目的是保證事故情況下頻率的快速恢復,但頻率恢復還必須考慮聯絡線的安全約束,使動態ACE具有聯絡線安全約束能力。
在上述過程中,各控制區的AGC機組根據所在區域的ACE自動進行調整,無法考慮聯絡線的安全約束問題。所以,區域調度中心在確定本區域應調節的功率量后,還須根據當前聯絡線負載狀態計算出AGC機組的功率調整能否造成聯絡線功率越限。如有越限情況發生,則要立即算出保證不越限時每台在線AGC機組所做功率調整的最大額度,指示AGC機組調節。上述問題可利用最近一次系統安全校核所得到的發電機—聯絡線功率靈敏度係數實時進行。因華東電網內各省市之間的聯絡線主要為熱穩定問題,故基於技術條件,採用最近一次的靈敏度係數,手動調整動態ACE,可以有效控制聯絡線越限情況。
當檢測到任一聯絡線輸送功率超穩定限額40%且持續時間達到5 min,或聯絡線輸送功率超穩定限額20%且持續時間達到10 min,區域調度中心調度員在保持總調整功率不變的前提下在動態ACE值上疊加手動調整量,手動調整各控制區目標功率值,減輕聯絡線功率越限程度。
基本信息
- 中文名
- 區域控制誤差
- 外文名
- Area Control Error
- 應有
- 聯絡線控制
- 簡稱
- ACE