行星輪系
只具有一個自由度的周轉輪系
行星輪系是指只具有一個自由度的周轉輪系。行星輪系是一種共軸式(即輸出軸線與輸入軸線重合)的傳動裝置,並且又採用了幾個完全相同的行星輪均布在中心輪的四周。
採用一系列互相嚙合的齒輪將主動軸和從動軸連接起來,這種多齒輪的傳動裝置稱為輪系。
根據輪系運動時其各輪軸線的位置是否固定,可以將輪系分為下列兩大類:
(1)定軸輪系 當輪系運動時,其各輪軸線的位置固定不動的稱為定軸輪系或普通輪系。
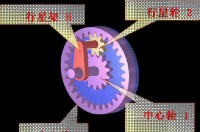
行星輪系主要由行星輪g、中心輪k及行星架H組成。其中行星輪的個數通常為2~6個。但在計算傳動比時,只考慮1個行星輪的轉速,其餘的行星輪計算時不用考慮,稱為虛約束。它們的作用是均勻地分佈在中心輪的四周,既可使幾個行星輪共同承擔載荷,以減小齒輪尺寸;同時又可使各嚙合處的徑向分力和行星輪公轉所產生的離心力得以平衡,以減小主軸承內的作用力,增加運轉平穩性。行星架是用於支承行星輪並使其得到公轉的構件。中心輪中,將外齒中心輪稱為太陽輪,用符號a表示,將內齒中心輪稱為內齒圈,用符號b表示。二、行星輪系的分類根據行星輪系基本構件的組成情況,可分為三種類型:2K-H型、3K型、K-H-V型。2K-H型具有構件數量少,傳動功率和傳動比變化範圍大,設計容易等優點,因此應用最廣泛。3K型具有三個中心輪,其行星架不傳遞轉矩,只起支承行星輪的作用。行星輪系按嚙合方式命名有NGW、NW、NN型等。N表示內嚙合,W表示外嚙合,G表示公用的行星輪g。
行星輪系與定軸輪系的根本區別在於行星輪系中具有轉動的行星架,從而使得行星輪系既有自轉,又有公轉。因此,行星輪系的傳動比的計算不能用定軸輪系的計算方法來計算。按照相對運動原理(反轉法),假設行星架H不動,即繞行星架轉動中心給系統加一個(-ωH)角速度,則可將行星輪系轉化為假想的定軸輪系,這個假想的定軸輪系稱為行星輪系的轉化輪系。轉化后的定軸輪系和原周轉輪系中各齒輪的轉速關係為:則轉化輪系傳動比的計算公式為:因此,對於行星輪系中任意兩軸線平行的齒輪j和齒輪k,它們在轉化輪系中的傳動比為:在各輪齒數已知的情況下,只要給定nj、nk、nH中任意兩項,即可求得第三項,從而可求出原行星輪系中任意兩構件之間的傳動比。
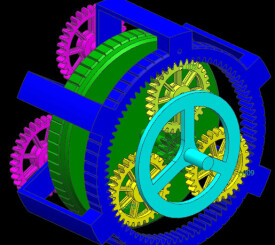
行星輪系部件圖
行星輪系是一種先進的齒輪傳動機構,具有結構緊湊、體積小、質量小、承載能力大、傳遞功率範圍及傳動範圍大、運行雜訊小、效率高及壽命長等優點。
行星輪系在國防、冶金、起重運輸、礦山、化工、輕紡、建築工業等部門的機械設備中,得到越來越廣泛的應用。將它們的主要功能歸納如下:
(1)實現大的傳動比。行星輪系可以用來減速,僅用幾個齒輪就能夠實現很大的傳動比。
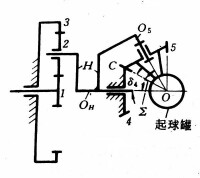
羊毛起球機機構示意圖
(3)實現結構緊湊的大功率傳動。周轉輪系通常採用多個行星輪的結構,這些行星輪對稱均勻地分佈在中心輪的周圍,這樣的結構可以用幾個行星輪共同承擔載荷,同時這些行星輪因公轉產生的慣性離心力和齒廓間的徑向分力又互相得以平衡,減少了主軸承受的力,相對地提高了承載能力及傳動的平穩性。
“浮動”是指某基本構件(如太陽輪、內齒輪或行星架)不加徑向支承,允許作徑向及偏轉位移,當受載不均衡時即可自動尋找平衡位置(自動定心),直至各行星輪之間載荷均勻分配為止。實質上也就是通過基本構件浮動來增加機構的自由度消除或減少虛約束,從而達到均載目的。
基本構件浮動最常用的方法是採用雙齒(或單齒)式聯軸器。三個基本構件中有一個浮動即可起到均載作用,兩個基本構件同時浮動時,效果更好。
均載機構的形式很多,且各有特點,設計與選擇時應針對具體情況,參考下述原則進行分析比較:
(1)均裁機構應使能最大限度地補償誤差和變形,使行星輪間的載荷分配不均衡係數和沿齒寬方向的裁荷分佈係數最小。
(2)均載機構的離心力要小,因為離心力量降低均載效果和傳動的工作平穩性.其大小與均載構件的旋轉速度、自重和偏心距離有關。
(3)均載機構的摩擦損失要小,效率要高。
(4)均載構件上受的力要大,受力大則補償動作靈敏效果好。
(5)均載構件在均載過程中的位移量應較小。也就是均載機構補償的等效誤差數值要小。行星輪和行星架的等效誤差比太陽輪和內齒輪的小。
(6)應有一定的緩衝和減振性能。
(7)要有利於傳動裝置整體結構的布置,使結構簡化便於製造、安裝和使用維修。