串級控制系統
一個調節器的輸出作為另一個調節器的給定值的系統
串級控制系統主要應用於:對象的滯后和時間常數很大、干擾作用強而頻繁、負荷變化大、對控制質量要求較高的場合。
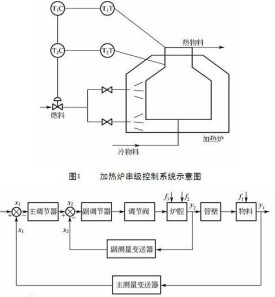
例:加熱爐出口溫度與爐膛溫度串級控制系統
1. 基本概念及組成結構
前一個調節器稱為主調節器,它所檢測和控制的變數稱主變數(主被控參數),即工藝控制指標;后一個調節器稱為副調節器,它所檢測和控制的變數稱副變數(副被控參數),是為了穩定主變數而引入的輔助變數。
整個系統包括兩個控制迴路,主迴路和副迴路。副迴路由副變數檢測變送、副調節器、調節閥和副過程構成;主迴路由主變數檢測變送、主調節器、副調節器、調節閥、副過程和主過程構成。
一次擾動:作用在主被控過程上的,而不包括在副迴路範圍內的擾動。二次擾動:作用在副被控過程上的,即包括在副迴路範圍內的擾動。
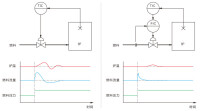
當擾動發生時,破壞了穩定狀態,調節器進行工作。根據擾動施加點的位置不同,分種情況進行分析:
* 1)擾動作用於副迴路
* 2)擾動作用於主過程
* 3)擾動同時作用於副迴路和主過程
分析可以看到:在串級控制系統中,由於引入了一個副迴路,不僅能及早克服進入副迴路的擾動,而且又能改善過程特性。副調節器具有“粗調”的作用,主調節器具有“細調”的作用,從而使其控制品質得到進一步提高。
* 改善了過程的動態特性,提高了系統控制質量。
* 能迅速克服進入副迴路的二次擾動。
* 提高了系統的工作頻率。
* 對負荷變化的適應性較強
* 應用於容量滯后較大的過程
* 應用於純時延較大的過程
* 應用於擾動變化激烈而且幅度大的過程
* 應用於參數互相關聯的過程
* 應用於非線性過程
* 主參數的選擇和主迴路的設計
* 副參數的選擇和副迴路的設計
* 控制系統控制參數的選擇
* 串級控制系統主、副調節器控制規律的選擇
* 串級控制系統主、副調節器正、反作用方式的確定
1. 主迴路的設計
串級控制系統的主迴路是定值控制,其設計單迴路控制系統的設計類似,設計過程可以按照簡單控制系統設計原則進行。這裡主要解決串級控制系統中兩個迴路的協調工作問題。主要包括如何選取副被控參數、確定主、副迴路的原則等問題。
2. 副迴路的設計
由於副迴路是隨動系統,對包含在其中的二次擾動具有很強的抑制能力和自適應能力,二次擾動通過主、副迴路的調節對主被控量的影響很小,因此在選擇副迴路時應儘可能把被控過程中變化劇烈、頻繁、幅度大的主要擾動包括在副迴路中,此外要儘可能包含較多的擾動。
歸納如下。
(1) 在設計中要將主要擾動包括在副迴路中。
(2) 將更多的擾動包括在副迴路中。
(3) 副被控過程的滯后不能太大,以保持副迴路的快速相應特性。
(5) 在需要以流量實現精確跟蹤時,可選流量為副被控量。
在這裡要注意(2)和(3)存在明顯的矛盾,將更多的擾動包括在副迴路中有可能導致副迴路的滯後過大,這就會影響到副迴路的快速控制作用的發揮,因此,在實際系統的設計中要兼顧(2)和(3)的綜合。
例如,圖1所示的以物料出口溫度為主被控參數、爐膛溫度為副被控參數,燃料流量為控制參數的串級控制系統,假定燃料流量和氣熱值變化是主要擾動,系統把該擾動設計在副迴路內是合理的。
3. 主、副迴路的匹配
1) 主、副迴路中包含的擾動數量、時間常數的匹配
設計中考慮使二次迴路中應儘可能包含較多的擾動,同時也要注意主、副迴路擾動數量的匹配問題。副迴路中如果包括的擾動越多,其通道就越長,時間常數就越大,副迴路控制作用就不明顯了,其快速控制的效果就會降低。如果所有的擾動都包括在副迴路中,主調節器也就失去了控制作用。原則上,在設計中要保證主、副迴路擾動數量、時間常數之比值在3~10之間。比值過高,即副迴路的時間常數較主迴路的時間常數小得太多,副迴路反應靈敏,控制作用快,但副迴路中包含的擾動數量過少,對於改善系統的控制性能不利;比值過低,副迴路的時間常數接近主迴路的時間常數,甚至大於主迴路的時間常數,副迴路雖然對改善被控過程的動態特性有益,但是副迴路的控制作用缺乏快速性,不能及時有效地克服擾動對被控量的影響。嚴重時會出現主、副迴路“共振”現象,系統不能正常工作。
2) 主、副調節器的控制規律的匹配、選擇
在串級控制系統中,主、副調節器的作用是不同的。主調節器是定值控制,副調節器是隨動控制。系統對二個迴路的要求有所不同。主迴路一般要求無差,主調節器的控制規律應選取PI或PID控制規律;副迴路要求起控制的快速性,可以有餘差,一般情況選取P控制規律而不引入 I 或 D 控制。如果引入 I 控制,會延長控制過程,減弱副迴路的快速控制作用;也沒有必要引入 D控制,因為副迴路採用 P控制已經起到了快速控制作用,引入D控制會使調節閥的動作過大,不利於整個系統的控制。
3) 主、副調節器正反作用方式的確定
一個過程式控制制系統正常工作必須保證採用的反饋是負反饋。串級控制系統有兩個迴路,主、副調節器作用方式的確定原則是要保證兩個迴路均為負反饋。確定過程是首先判定為保證內環是負反饋副調節器應選用那種作用方式,然後再確定主調節器的作用方式。以圖1所示物料出口溫度與爐膛溫度串級控制系統為例,說明主、副調節器正反作用方式的確定。
副調節器作用方式的確定:
首先確定調節閥,出於生產工藝安全考慮,燃料調節閥應選用氣開式,這樣保證當系統出現故障使調節閥損壞而處於全關狀態,防止燃料進入加熱爐,確保設備安全,調節閥的 Kv >0 。然後確定副被控過程的KO2,當調節閥開度增大,燃料量增大,爐膛溫度上升,所以 Ko2 >0 。最後確定副調節器,為保證副迴路是負反饋,各環節放大係數(即增益)乘積必須為正,所以副調節器 K 2>0 ,副調節器作用方式為反作用方式。
主調節器作用方式的確定:
爐膛溫度升高,物料出口溫度也升高,主被控過程 Ko1 > 0。為保證主迴路為負反饋,各環節放大係數乘積必須為正,所以副調節器的放大係數 K 1> 0,主調節器作用方式為反作用方式。
例如圖1所示串級控制系統示意圖,從加熱爐安全形度考慮,調節閥應選氣開閥,即如果調節閥的控制信號中斷,閥門應處於關閉狀態,控制信號上升,閥門開度增大,流量增加,是正作用方式。反之,為負作用方式。副對象的輸入信號是燃料流量,輸出信號是閥后燃料壓力,流量上升,壓力亦增加是正作用方式。測量變送單元作用方式均為正。
在圖2的串級控制系統框圖中可以看到,由於副迴路可以簡化成一個正作用方式環節,主對象作用方式為正,主測量變送環節為正。根據單迴路控制系統設計中介紹的閉合系統必須為負反饋控制系統設計原則,即閉環各環節比例度乘積必須為正,故主調節器均選用反作用調節器,副調節器均選用反作用調節器。
1. 用於克服被控過程較大的容量滯后
在過程式控制制系統中,被控過程的容量滯后較大,特別是一些被控量是溫度等參數時,控制要求較高,如果採用單迴路控制系統往往不能滿足生產工藝的要求。利用串級控制系統存在二次迴路而改善過程動態特性,提高系統工作頻率,合理構造二次迴路,減小容量滯后對過程的影響,加快響應速度。在構造二次迴路時,應該選擇一個滯后較小的副迴路,保證快速動作的副迴路。
2. 用於克服被控過程的純滯后
被控過程中存在純滯後會嚴重影響控制系統的動態特性,使控制系統不能滿足生產工藝的要求。使用串級控制系統,在距離調節閥較近、純滯后較小的位置構成副迴路,把主要擾動包含在副迴路中,提高副迴路對系統的控制能力,可以減小純滯后對主被控量的影響。改善控制系統的控制質量。
3. 用於抑制變化劇烈幅度較大的擾動
串級控制系統的副迴路對於迴路內的擾動具有很強的抑制能力。只要在設計時把變化劇烈幅度大的擾動包含在副迴路中,即可以大大削弱其對主被控量的影響。
4. 用於克服被控過程的非線性
在過程式控制制中,一般的被控過程都存在著一定的非線性。這會導致當負載變化時整個系統的特性發生變化,影響控制系統的動態特性。單迴路系統往往不能滿足生產工藝的要求,由於串級控制系統的副迴路是隨動控制系統,具有一定的自適應性,在一定程度上可以補償非線性對系統動態特性的影響。
應用於容量滯后較大的對象
當對象的容量滯后較大時,若採用單迴路控制,則系統的控制時間長、超調量大,控制質量往往不能滿足生產要求。若採用串級控制,則根據對其特點的分析表明,可以選擇一個滯后較小的副參數,構成一個副迴路,使等效對象的時間常數減小,以提高系統的工作效率,加快反應速度,可以得到較好的控制質量。因此,對於很多以溫度或質量參數為被調參數的對象,其容量滯后往往比較大,而生產上對這些參數的控制質量要求又比較高,此時宜採用串級控制系統。
應用於純滯后較大的對象
當對象純滯后較大,單迴路反饋控制系統不能滿足工藝要求時,有時可以用串級控制系統來改善系統的控制質量。因為採用串級控制系統后,就可以在離調節閥較近、純滯后較小的地方,選擇一個輔助參量作為副參數,構成一個純滯后較小的副迴路。當擾動作用於副迴路時,在它通過純滯后較大的主對象去影響主參數之前,由副迴路實現對主要擾動的控制,從而克服純滯后的影響。副迴路純滯后小,控制及時,可以大大減小擾動對主參數的影響。
應用於擾動變化激烈而且幅度大的對象
串級控制系統的副迴路對於進入其中的擾動具有較強的校正能力。所以,在系統設計時,只要將變化激烈而且幅度大的擾動包括在副迴路中,就可以大大減小這種變化激烈而幅度大的擾動對主參數的影響。
應用於參數互相關聯的對象
在有些生產過程中,有時兩個互相關聯的參數需要利用同一個介質進行控制。在這種情況下,若採用單迴路回饋控制系統,則需要裝兩套裝置。如前所述,在同一條管道上要安裝兩個調節閥,不僅不經濟,而且也是無法工作的。對於這樣的對象可以採用串級控制系統。分清互相關聯參數的主次,組成串級控制,以滿足工藝上的要求。
基本信息
- 條件
- 擾動發生,破壞了穩定狀態
- 應用場合
- 容量滯后較大,純時延較大的過程
- 中文名
- 串級控制系統
- 釋義
- 兩隻調節器串聯起來工作