諧波傳動
諧波傳動
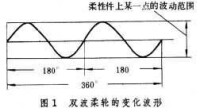
諧波傳動是利用一個構建的可控制的彈性變形來實現機械運動的傳遞。
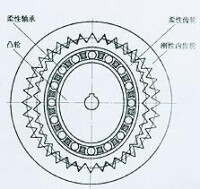
諧波傳動通常由三個基本構件組成,包括一個有內齒的剛輪,一個工作時可產生徑向彈性變形並帶有外齒的柔輪和一個裝在柔輪內部、呈橢圓形、外圈帶有柔性滾動軸承的波發生器。
諧波傳動
傳動比大,單級為50-300,雙極可達2×10^6。
傳動平穩,承載能力高,傳遞單位扭矩的體積和重量小。在相同條件下,體積可減少20-50%。
齒面磨損小而均勻,傳動效率高。當結構合理潤滑效果良好時,對i=100的傳動,效率可達0.85。
傳動精度高。在製造精度相同的情況下,諧波傳動的精度可比普通齒輪傳動高一級。若齒面經過很好的研磨,則諧波齒輪傳動的精度要比普通齒輪傳動高4倍。
回差小。精密諧波傳動的回差一般可小於3',甚至可以實現無回差傳動。
可以通過密封壁傳遞運動,這是其他傳動機構很難實現的。
諧波傳動原理
由波發生器、柔性件和剛性件 3個基本構件組成的機械傳動。這種傳動是在波發生器的作用下,
諧波傳動
圖2為一個外周有許多齒( 120個以上)的柔輪與一個內周有齒的剛輪相嚙合進行傳動,稱為諧波齒輪傳動。假設將齒數無限增多,齒高也無限減小,則成為柔輪外表面和剛輪內表面在波發生器長軸方向上進行接觸的諧波摩擦傳動。由於這種接觸點的摩擦力很小,傳遞的力矩不大,容易打滑,實際上應用很少。諧波傳動也可以設計成由轉動改為直線運動,成為諧波螺旋傳動。在3種傳動中以諧波齒輪傳動應用最廣。圖2中波發生器是機械式波發生器,此外還有電磁式、液力式和氣動式的波發生器,其中機械式波發生器應用最普遍。
諧波傳動是美國人C.W.馬瑟於1955年提出的專利,1959年得到批准,1960年在紐約展出實物。諧波傳動的發展是由軍事和尖端技術開始的,以後逐漸擴展到民用和一般機械上。一些國家如美國、日本、蘇聯已有了諧波齒輪減速器的系列化產品,在中國也制定了諧波齒輪的部頒標準。
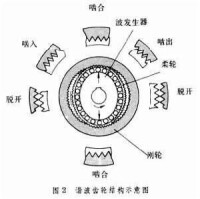
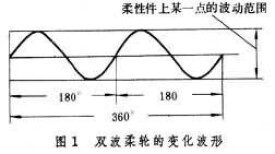
工作原理 以諧波齒輪傳動為例。它是利用柔輪、剛輪和波發生器的相對運動,特別是柔輪的可控彈性變形(形狀改變)來實現運動和動力傳遞的。在這 3個基本構件中可任意固定一個,其餘一個為主動件一個為從動件。如果3個都不固定,則成為差動輪系。如以剛輪固定不變,以波發生器為主動件,柔輪為從動件,波發生器內的橢圓形凸輪在柔輪內旋轉便使柔輪產生變形。在波發生器的橢圓形凸輪長軸兩端處的柔輪輪齒和剛輪輪齒進入嚙合時,短軸兩端處的柔輪輪齒與剛輪輪齒脫開。對於波發生器長軸和短軸之間的齒,沿柔輪和剛輪周長的不同區段內處於逐漸進入嚙合的半嚙合狀態,稱為嚙入;處於逐漸退出嚙合的半嚙合狀態,稱為嚙出。波發生器的連續轉動,使嚙入、嚙合、嚙出和脫開四種運動不斷改變各自原來的工作狀態,這種運動稱為錯齒運動。錯齒運動使輸入轉動變為輸出運動。若剛輪固定不動,柔輪則相對於波發生器作反方向的轉動。反之若柔輪固定不動,剛輪則相對於波發生器作同方向的轉動。對於雙波傳動的諧波齒輪傳動,它的轉動規律是:波發生器轉一周,柔輪相對於剛輪在周長方向轉過兩個齒距的弧長,其轉動比計算如下:
公式
公式
當剛輪固定時 當柔輪固定時 柔輪或剛輪的齒數都很多,它們之間的差數又很小,因此可獲得很大的傳動比。
結構 諧波齒輪傳動的結構有多種型式,圖3為單級雙波諧波齒輪減速器的結構。
諧波傳動

諧波減速器
② 柔輪:有薄壁杯形、薄壁圓筒形或平嵌式等多種。薄壁圓筒形柔輪的開口端部外面有齒圈,它隨波發生器的轉動而變形,筒底部分與輸出軸聯接。
③ 剛輪:它是一個剛性的內齒輪。雙波諧波傳動的剛輪通常比柔輪多二齒。諧波齒輪減速器多以剛輪固定,外部與箱體聯接。

諧波傳動
諧波傳動的特點是:
①傳動比大,選擇範圍廣。單級諧波齒輪的傳動比一般為60~320,其中以80~200為最常用。
②傳遞扭矩的同時嚙合的齒數多,一般雙波傳動嚙合齒數可佔總齒數的30%左右,三波傳動則更多。因此傳動輪之間的接觸為面接觸,而齒面上的比壓小,因而承載能力高。
③由諧波齒輪構成的減速器重量輕、體積小,傳動裝置含有的零件少。
④傳動平穩,雜訊小。
⑤傳動效率高。
⑥運動精度高,在起動或反轉時,輸出軸瞬時跟動,沒有空程,可實現零回差轉動。
⑦可構成密封傳動,因此可在高溫、高壓、高真空、有害氣體或原子能輻射的環境中傳遞運動。
⑧輸出軸和輸入軸位於同一軸心線上。
基本信息
- 雙極
- 可達2×10^6
- 相關
- 機械運動
- 單級為
- 50-300