EC風機
有高智能等優點的離心風機
( )源流源、置流交流(六逆模塊)、采轉置反饋、交流、永磁、同步電機。(直流無刷只是電源品質和電機的表象,而不是電機的實質,EC電機實質上是三相交流永磁同步電機)
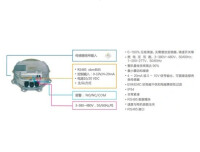
置智控制模塊流刷式免維護型,輸、-傳器輸、-調速開關輸出介面、報警裝置輸出介面及主從信號輸出介面。該產品具有高智能、高節能、高效率、壽命長、振動小、雜訊低以及可連續不間斷工作等特點。
同時氣隙磁密可大大提高,電機指標可實現最佳設計,其直接效果就是電機體積縮小,重量減輕。不僅如此,較其它電機而言,還具有非常優異的控制性能。這是因為:其一,由於永磁材料的高性能而使電機的力矩常數、轉矩慣量比、功率密度等大大提高。通過合理設計又能使轉動慣量、電氣及機械時間常數等指標大大降低,作為伺服控制性能的主要指標有了很大改善。其二,現代永磁磁路的設計已較完善,加上永磁材料的矯頑力高,因而永磁電機的抗電樞反應及其抗去磁的能力大大加強,電機的控制參量隨外部擾動影響大大減小。其三,由於用永磁體取代了電勵磁,減少了勵磁繞組及勵磁磁場的設計,因而減少了勵磁磁通、勵磁繞組電感、勵磁電流等諸多參數,從而直接減少了可控變數或參量。綜合以上各因素可以說永磁電機具有優異的可控性。
目前大容量風機調節風量已有很多採用變頻調速方式,這一類變頻器主要依賴進口,價格昂貴。目前1kw以下功率等級的風機,特別是家用空調等的風機已有永磁無刷直流電機驅動,並採用調速調風量方式。1~10kw功率範圍的風機用量巨大,基本採用感應電機驅動,並採用調節風口開度方式調節風量。對於這一功率範圍內的風機,採用永磁無刷直流電機驅動替代原先的感應電機驅動具有巨大的優越性。
(1)損耗小、效率高
因為採用了永磁體勵磁,消除了感應電機勵磁電流產生的損耗;同時永磁無刷直流電動機工作於同步運行方式,消除了感應電機轉子鐵心的轉頻損耗。這兩方面使永磁無刷直流電機的運行效率遠高於感應電機,小容量電機的效率提高更明顯。
(2)功率因數高
由於無刷直流電機的勵磁磁場不需要電網的無功電流,因此其功率因數遠高於感應電機,無刷直流電機可以運行於1功率因數,這對小功率電機極為有利。無刷電機與感應電機相比不但額定負載時具有更高的效率和功率因數,而且在輕載時更具有優勢。
(3)調速性能好、控制簡單
與感應電機的變頻調速相比,無刷直流電機的調速控制不但簡單,而且具有更好的調速性能。
(4)逆變器容量低,因此逆變器成本低
無刷直流電動機需要矩形波電流,逆變器持續運行時的電流額定值指的就是這個矩形波的峰值。感應電機需要正弦波電流,逆變器持續運行時的電流額定值一般指的是這個正弦波的有效值。為保持逆變器對電動機電流的控制能力,逆變器直流電壓與電動機感應電動勢間應有足夠的差值。因此無刷直流電動機梯形波感應電動勢和感應電動機正弦波感應電動勢可以達到的峰值都受到逆變器直流電壓的限制。在這種情況下,若假定無刷直流電動機和感應電動機電流的峰值相等,則前者功率輸出要比後者高出33%,也就是說,同一台整流器/逆變器可以驅動比感應電機輸出功率高出33%的無刷直流電動機。
無刷直流電動機是採用半導體開關器件來實現電子換向的,即用電子開關器件代替傳統的接觸式換向器和電刷。它具有可靠性高、無換向火花、機械雜訊低等優點,廣泛應用於高檔錄音座、錄像機、電子儀器及自動化辦公設備中。
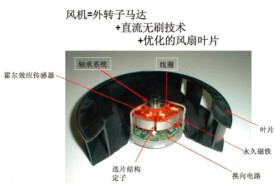
無刷直流電動機由永磁體轉子、多極繞組定子、位置感測器等組成。位置感測按轉子位置的變化,沿著一定次序對定子繞組的電流進行換流(即檢測轉子磁極相對定子繞組的位置,並在確定的位置處產生位置感測信號,經信號轉換電路處理後去控制功率開關電路,按一定的邏輯關係進行繞組電流切換)。定子繞組的工作電壓由位置感測器輸出控制的電子開關電路提供。
位置感測器有磁敏式、光電式和電磁式三種類型。
採用磁敏式位置感測器的無刷直流電動機,其磁敏感測器件(例如霍爾元件、磁敏二極體、磁敏詁極管、磁敏電阻器或專用集成電路等)裝在定子組件上,用來檢測永磁體、轉子旋轉時產生的磁場變化。
採用光電式位置感測器的無刷直流電動機,在定子組件上按一定位置配置了光電感測器件,轉子上裝有遮光板,光源為發光二極體或小燈泡。轉子旋轉時,由於遮光板的作用,定子上的光敏元器件將會按一定頻率間歇間生脈衝信號。
採用電磁式位置感測器的無刷直流電動機,是在定子組件上安裝有電磁感測器部件(例如耦合變壓器、接近開關、LC諧振電路等),當永磁體轉子位置發生變化時,電磁效應將使電磁感測器產生高頻調製信號(其幅值隨轉子位置而變化)。
直流電機具有響應快速、較大的起動轉矩、從零轉速至額定轉速具備可提供額定轉矩的性能,但直流電機的優點也正是它的缺點,因為直流電機要產生額定負載下恆定轉矩的性能,則電樞磁場與轉子磁場須恆維持90°,這就要藉由碳刷及整流子。碳刷及整流子在電機轉動時會產生火花、碳粉因此除了會造成組件損壞之外,使用場合也受到限制。交流電機沒有碳刷及整流子,免維護、堅固、應用廣,但特性上若要達到相當於直流電機的性能須用複雜控制技術才能達到。現今半導體發展迅速功率組件切換頻率加快許多,提升驅動電機的性能。微處理機速度亦越來越快,可實現將交流電機控制置於一旋轉的兩軸直交坐標系統中,適當控制交流電機在兩軸電流分量,達到類似直流電機控制並有與直流電機相當的性能。
此外已有很多微處理機將控制電機必需的功能做在晶元中,而且體積越來越小;像模擬/數字轉換器(analog-to-digital converter,adc)、脈衝寬度調製(pulse wide modulator,pwm)…等。直流無刷電機即是以電子方式控制交流電機換相,得到類似直流電機特性又沒有直流電機機構上缺失的一種應用。
直流無刷電機是同步電機的一種,也就是說電機轉子的轉速受電機定子旋轉磁場的速度及轉子極數(p)影響。在轉子極數固定情況下,改變定子旋轉磁場的頻率就可以改變轉子的轉速。直流無刷電機即是將同步電機加上電子式控制(驅動器),控制定子旋轉磁場的頻率並將電機轉子的轉速回授至控制中心反覆校正,以期達到接近直流電機特性的方式。也就是說直流無刷電機能夠在額定負載範圍內當負載變化時仍可以控制電機轉子維持一定的轉速。
電源部可以直接以直流電輸入(一般為24V)或以交流電輸入(110v/220v),如果輸入是交流電就得先經轉換器(converter)轉成直流。不論是直流電輸入或交流電輸入要轉入電機線圈前須先將直流電壓由換流器(inverter)轉成3相電壓來驅動電機。換流器(inverter)一般由6個功率晶體管(q1~q6)分為上臂(q1、q3、q5)/下臂(q2、q4、q6)連接電機作為控制流經電機線圈的開關。控制部則提供pwm(脈衝寬度調製)決定功率晶體管開關頻度及換流器(inverter)換相的時機。直流無刷電機一般希望使用在當負載變動時速度可以穩定於設定值而不會變動太大的速度控制,所以電機內部裝有能感應磁場的霍爾感測器(hall-sensor),作為速度之閉迴路控制,同時也做為相序控制的依據。但這只是用來做為速度控制並不能拿來做為定位控制。
EC風機
當電機轉動起來,控制部會再根據驅動器設定的速度及加/減速率所組成的命令(command)與hall-sensor信號變化的速度加以比對(或由軟體運算)再來決定由下一組(ah、bl或ah、cl或bh、cl或……)開關導通,以及導通時間長短。速度不夠則開長,速度過頭則減短,此部份工作就由pwm來完成。pwm是決定電機轉速快或慢的方式,如何產生這樣的pwm才是要達到較精準速度控制的核心。高轉速的速度控制必須考慮到系統的clock解析度是否足以掌握處理軟體指令的時間,另外對於hall-sensor信號變化的資料存取方式也影響到處理器效能與判定正確性、實時性。至於低轉速的速度控制尤其是低速起動則因為回傳的hall-sensor信號變化變得更慢,怎樣擷取信號方式、處理時機以及根據電機特性適當配置控制參數值就顯得非常重要。或者速度回傳改變以encoder變化為參考,使信號解析度增加以期得到更佳的控制。電機能夠運轉順暢而且響應良好,p.i.d.控制的恰當與否也無法忽視。之前提到直流無刷電機是閉迴路控制,因此回授信號就等於是告訴控制部現在電機轉速距離目標速度還差多少,這就是誤差(error)。知道了誤差自然就要補償,方式有傳統的工程式控制制如p.i.d.控制。但控制的狀態及環境其實是複雜多變的,若要控制的堅固耐用則要考慮的因素恐怕不是傳統的工程式控制制能完全掌握,所以模糊控制、專家系統及神經網路也將被納入成為智能型p.i.d.控制的重要理論。
基本信息
- 中文名
- EC風機
- 外文名
- EC
- 全稱
- Electrical Commutation
- 電機電源
- 直流電源、內置直流變交流等
- 優點
- 高智能、高節能、高效率、壽命長