無線電導航
無線電導航
利用無線電引導飛行器沿規定航線、在規定時間達到目的地的航行技術。利用無線電波的傳播特性可測定飛行器的導航參量(方位、距離和速度),算出與規定航線的偏差,由駕駛員或自動駕駛儀操縱飛行器消除偏差以保持正確航線。
目錄
無線電導航所使用的設備或系統有無線電羅盤、伏爾導航系統、塔康導航系統、羅蘭C導航系統、奧米加導航系統、多普勒導航系統、衛星導航系統以及發展中的“導航星”全球定位系統等。
無線電信號中包含4個電氣參數:振幅、頻率、時間和相位。無線電波在傳播過程中,某一參數可能發生與某導航參量有關的變化。通過測量這一電氣參數就可得到相應的導航參量。根據所測電氣參數的不同,無線電導航系統可分為振幅式、頻率式、時間式(脈衝式)和相位式 4種。也可根據要測定的導航參量將無線電導航系統分為測角(方位角或高低角)、測距、測距差和測速 4種。現代還根據無線電導航設備的主要安裝基地分為地基(設備主要安裝在地面或海面)、空基(設備主要安裝在飛行的飛機上)和衛星基(設備主要裝在導航衛星上) 3種。根據作用距離分為近程、遠程、超遠程和全球定位4種。
無線電導航測角系統 利用無線電波直線傳播的特性,將飛機上的環形方向性天線轉到使接收的信號幅值為最小的位置,從而測出電台航向(見無線電羅盤),這屬於振幅式導航系統。同樣,也可利用地面導航台發射迅速旋轉的方向圖,根據飛機不同位置接收到的無線電信號的不同相位來判定地面導航台相對飛機的方位角(見伏爾導航系統),這屬於相位式導航系統。測角系統可用於飛機返航(保持某導航參量不變,例如保持電台航向為零,引導飛機飛嚮導航台)。幾何參數(角度、距離等)相等點的軌跡稱為位置線。測角系統的位置線是直線(角度參量保持恆值的飛機所在錐面與地平面的交線)。測出兩個電台的航向就可得到兩條直線位置線的交點,這交點就是飛機的位置(圖1)。無線電導航測距系統 利用無線電波恆速直線傳播的特性。在飛機和地面導航台上各安裝一套接收、發射機。飛機向地面導航台發射詢問信號,地面導航台接收並向飛機轉發回答信號。飛機接收機收到的回答信號比詢問信號滯后一定時間。測出滯后時間就可算出飛機與導航台的距離。利用電波的反射特性,測定由地面導航台或飛機的反射信號的滯后時間也可求出距離。無線電導航測距系統的位置線是一個圓周,它由地面導航台等距的圓球位置面與飛機所在高度的地心球面相交而成。利用測距系統可引導飛機在航空港作等待飛行,或由兩條圓位置線的交點確定飛機的位置(圖2)。定位的雙值性(有兩個交點)可用第三條圓位置線來消除。測距系統可以是脈衝式的、相位式的或頻率式的。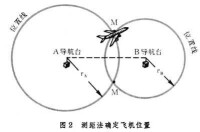 無線電導航測距差系統 在飛機上安裝一台接收機,地面設置2~4個導航台。各導航台同步地(時間同步或相位同步)發射無線電信號,各信號到達飛機接收機的時間滯后與導航台到飛機的距離成比例。測出它們到達的時間差就可求得距離差。與兩個定點保持等距離差的點的軌跡是球面雙曲面,因此這種系統的位置線是球面雙曲面與飛機所在高度的地心球面相交而成的雙曲線。利用3或4個地面導航台可求得兩條雙曲線。根據兩條雙曲線的交點即可定出飛機的位置(圖3)。定位的雙值可用第三條雙曲線來消除。現代使用的測距差系統大多是脈衝式或相位式的。
無線電導航測距差系統 在飛機上安裝一台接收機,地面設置2~4個導航台。各導航台同步地(時間同步或相位同步)發射無線電信號,各信號到達飛機接收機的時間滯后與導航台到飛機的距離成比例。測出它們到達的時間差就可求得距離差。與兩個定點保持等距離差的點的軌跡是球面雙曲面,因此這種系統的位置線是球面雙曲面與飛機所在高度的地心球面相交而成的雙曲線。利用3或4個地面導航台可求得兩條雙曲線。根據兩條雙曲線的交點即可定出飛機的位置(圖3)。定位的雙值可用第三條雙曲線來消除。現代使用的測距差系統大多是脈衝式或相位式的。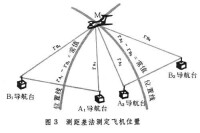 無線電導航測速系統 這種系統大多是利用多普勒效應工作的。安裝在飛機上的多普勒導航雷達以窄波束向地面發射厘米波段的無線電信號。由於存在多普勒效應,飛機接收到由地面反射回來的信號頻率與發射信號頻率不同,存在一個多普勒頻移,測出多普勒頻移就可求出飛行器相對於地面的速度(見多普勒導航系統)。再利用飛機上垂直基準和航向基準給出的俯仰角和航向角,將徑向速度分解出東向速度和北向速度,分別對時間求積分即可得出飛機當時的位置。多普勒測速系統的位置線也是雙曲線,它是由等多普勒頻移的錐面與飛機所在高度的地心球面相交而成的。多普勒導航測速系統屬於頻率式(見飛機導航系統)。
無線電導航測速系統 這種系統大多是利用多普勒效應工作的。安裝在飛機上的多普勒導航雷達以窄波束向地面發射厘米波段的無線電信號。由於存在多普勒效應,飛機接收到由地面反射回來的信號頻率與發射信號頻率不同,存在一個多普勒頻移,測出多普勒頻移就可求出飛行器相對於地面的速度(見多普勒導航系統)。再利用飛機上垂直基準和航向基準給出的俯仰角和航向角,將徑向速度分解出東向速度和北向速度,分別對時間求積分即可得出飛機當時的位置。多普勒測速系統的位置線也是雙曲線,它是由等多普勒頻移的錐面與飛機所在高度的地心球面相交而成的。多普勒導航測速系統屬於頻率式(見飛機導航系統)。
無線電導航
無線電導航