機器人系統
具備智能能力的自動化機器系統
機器人系統是由機器人和作業對象及環境共同構成的整體,其中包括機械系統、驅動系統、控制系統和感知系統四大部分。機器人是一種自動化的機器,這種機器具備一些與人或生物相似的智能能力,如感知能力、規劃能力、動作能力和協同能力,是一種具有高度靈活性的自動化機器。
至今還沒有機器人的統一定義。要給機器人下一個合適的並為人們普遍接受的定義是困難的。專家們採用不同的方法來定義這個術語。它的定義還因公眾對機器人的想象以及科學幻想小說、電影和電視中對機器人形狀的描繪而變得更為困難。為了規定技術、開發機器人新的工作能力和比較不同國家和公司的成果,就需要對機器人這一術語有某些共同的理解。現在,世界上對機器人還沒有統一的定義,各國有自己的定義。這些定義之間差別較大。這種差別的部分原因是很難區別簡單的機器人與其密切相關的運送材料的“剛性自動化”技術裝置。
美國機器人協會(RIA)把機器人定義為“一種用於移動各種材料、零件、工具或專用裝置的,通過可編程序動作來執行種種任務的,並具有編程能力的多功能機械手”。顯然,這裡指的是工業機器人。
日本工業機器人協會(JIRA)定義工業機器人為“一種裝備有記憶裝置和末端執行器的,能夠轉動並通過自動完成各種移動來代替人類勞動的通用機器”。
機器人系統是由機器人和作業對象及環境共同構成的,其中包括機械系統、驅動系統、控制系統和感知系統四大部分。
工業機器人的機械系統包括機身、臂部、手腕、末端操作器和行走機構等部分,每一部分都有若干自由度,從而構成一個多自由度的機械系統。此外,有的機器人還具備行走機構。若機器人具備行走機構,則構成行走機器人;若機器人不具備行走及腰轉機構,則構成單機器人臂。末端操作器是直接裝在手腕上的一個重要部件,它可以是兩手指或多手指的手爪,也可以是噴漆槍、焊槍等作業工具。工業機器人機械系統的作用相當於人的身體(如骨髓、手、臂和腿等)。
驅動系統主要是指驅動機械系統動作的驅動裝置。根據驅動源的不同,驅動系統可分為電氣、液壓和氣壓三種以及把它們結合起來應用的綜合系統。該部分的作用相當於人的肌肉。
電氣驅動系統在工業機器人中應用得較普遍,可分為步進電動機、直流伺服電動機和交流伺服電動機三種驅動形式、早期多採用步進電動機驅動,後來發展了直流伺服電動機,現在交流伺服電動機驅動也逐漸得到應用。上述驅動單元有的用於直接驅動機構運動,有的通過諧波減速器減速后驅動機構運動,其結構簡單緊湊。
液壓驅動系統運動平穩,且負載能力大,對於重載搬運和零件加工的機器人,採用液壓驅動比較合理。但液壓驅動存在管道複雜、清潔困難等缺點,因此限制了它在裝配作業中的應用。
無論電氣還是液壓驅動的機器人,其手爪的開合都採用氣動形式。氣壓驅動機器人結構簡單、動作迅速、價格低廉,但由於空氣具有可壓縮性,其工作速度的穩定性較差。但是,空氣的可壓縮性可使手爪在抓取或卡緊物體時的順應性提高,防止受力過大而造成被抓物體或手爪本身的破壞。氣壓系統的壓力一般為0.7 MPa,因而抓取力小,只有幾十牛到幾百牛大小。
控制系統的任務是根據機器人的作業指令程序及從感測器反饋回來的信號控制機器人的執行機構,使其完成規定的運動和功能。
如果機器人不具備信息反饋特徵,則該控制系統稱為開環控制系統;如果機器人具備信息反饋特徵,則該控制系統稱為閉環控制系統。該部分主要由計算機硬體和控制軟體組成。軟體主要由人與機器人進行聯繫的人機交互系統和控制演演算法等組成。該部分的作用相當於人的大腦。
感知系統由內部感測器和外部感測器組成,其作用是獲取機器人內部和外部環境信息,並把這些信息反饋給控制系統。內部狀態感測器用於檢測各關節的位置、速度等變數,為閉環伺服控制系統提供反饋信息。外部狀態感測器用於檢測機器人與周圍環境之間的一些狀態變數,如距離、接近程度和接觸情況等,用於引導機器人,便於其識別物體並做出相應處理。外部感測器可使機器人以靈活的方式對它所處的環境做出反應,賦予機器人一定的智能。該部分的作用相當於人的五官。
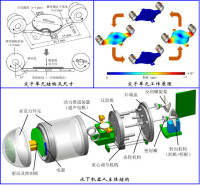
圖1 機器人系統的組成
機器人的分類方法很多。這裡首先介紹i種分類法,即按機械手的幾何結構、機器人的控制方式以及機器人的信息輸入方式。
(1)按機械手的幾何結構分類
機器人機械手的機械配置形式多種多樣。最常見的結構形式是用其坐標特性來描述的。這些坐標結構包括笛卡兒坐標結構、柱面坐標結構、極坐標結構、球面坐標結構和關節式球面坐標結構等。這裡簡單介紹柱面、球面和關節式球面坐標結構三種最常見的機器人。
(2)按機器人的控制方式分類
按照控制方式可將機器人分為非伺服機器人和伺服控制機器人兩種。
1)非伺服機器人。非伺服機器人工作能力比較有限,它們往往涉及那些叫做“終點”、“抓放”或“開關”式機器人,尤其是“有限順序”機器人。
2)伺服控制機器人。伺服控制機器人比非伺服機器人有更強的工作能力,因而價格較貴,而且在某些情況下不如簡單的機器人可靠。伺服控制機器人又可分為點位伺服控制和連續路徑(軌跡)伺服控制兩種。
(3)按機器人控制器的信息輸入方式分類
在採用這種分類法進行分類時,對於不同國家也略有不同,但它們能夠有統一的標準。這裡主要介紹日本工業機器人協會(JIRA)、美國機器人協會(RIA)和法國工業機器人協會(AFRI)所採用的分類法。
1)JIRA分類法。日本工業機器人協會將機器人分為六類:手動操作手、定序機器人、變序機器人、復演式機器人、程式控制機器人和智能機器人。其中,智能機器人能夠採用感測信息來獨立檢測其工作環境或工作條件的變化,並藉助其自我決策能力,成功地進行相應的工作,而不管其執行任務的環境條件發生了什麼變化。
2)RIA分類法。美國機器人協會將JIRA分類法中的后四種機器當做機器人。
(4)按機器人的智能程度分類
1)一般機器人。不具有智能,只具有一般編程能力和操作功能。
2)智能機器人。具有不同程度的智能,又可分為:
a.感測型機器人。具有利用感測信息(包括視覺、聽覺、觸覺、接近覺、力覺和紅外、超聲及激光等)進行感測信息處理,實現控制與操作。
b.交互型機器人。機器人通過計算機系統與操作員或程序員進行人機對話,實現對機器人的控制與操作。
c.自立型機器人。在設計製作之後,機器人無需人的干預,能夠在各種環境下自動完成各項擬人任務。
(5)按機器人的用途分類
1)工業機器人或產業機器人。應用在工農業生產中,主要應用在製造業,進行焊接、噴漆、裝配、搬運、檢驗、農產品加工等作業。
2)探索機器人。用於進行太空和海洋探索,以及地面和地下的探險與探索。
3)服務機器人。一種半自主或全自主工作的機器人,其所從事的服務工作可使人類生存得更好,使製造業以外的設備工作得更好。
(6)按機器人移動性分類
1)固定式機器人。固定在某個底座上,整台機器人(或機械手)不能移動,只能移動各個關節。

圖2
另一方面,如今越來越多的操作被設計成由人類操控的機器人在特定的工作環境下工作,娛樂、維修、空間探測、幫助殘疾人都是機器人系統應用的典型例子,這些例子中,機器人需要操作為人設計的工具或物體(或者人類自身)。這種情況下,機器人必須能抓取並熟練操作尺寸、形狀、質量等不同的物體,因此,具有合適數目手指及高度擬人化外表的機器人手是最佳的選擇。

基本信息
- 中文名
- 機器人系統
- 外文名
- robot syste
- 拼音
- jī qì rén xì tǒng
- 定義
- 具備一些智能能力的自動化的機器
- 類型
- 機械原理
- 分類
- 機械系統、驅動系統、控制系統
- 應用
- 工業機器人、服務機器人等
- 組成
- 機器人和作業對象及環境