共找到2條詞條名為狀態方程的結果 展開
- 流體力學
- 控制科學
狀態方程
控制科學
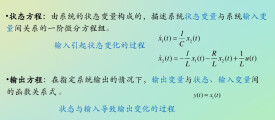
狀態方程是指刻畫系統輸入和狀態關係的表達式。狀態向量所滿足的向量常微分方程稱為控制系統的狀態方程。狀態方程是控制系統數學模型的重要組成部分。以傳遞函數為基礎的經典控制理論的數學模型適應當時手工計算的局限,著眼於系統的外部聯繫,重點為單輸入-單輸出的線性定常系統。伴隨計算機的發展,以狀態空間理論為基礎的現代控制理論的數學模型採用狀態空間方程,以時域分析為主,著眼於系統的狀態及其內部聯繫,研究的機電控制系統擴展為多輸入-多輸出的時變系統。所謂狀態變數是足以完全表徵系統運動狀態的最小個數的一組變數,而狀態方程則是由系統狀態變數構成的一階微分方程組。
連續線性時變控制系統:式中的(a)式稱為狀態方程。如果狀態向量的初始條件x(t)=x和t≥t時的輸入都已知,則可從(a)式完全決定t≥t時刻的所有狀態x(t),因而控制系統的動態行為就完全確定了。刻畫控制系統的輸出與狀態之聯繫的代數關係稱為輸出(或量測)方程。(b)式便是輸出方程。輸出方程提供了人們通過量測數據了解系統狀態變化的信息。狀態方程和輸出方程是控制系統數學模型的重要組成部分。
連續時間系統的狀態方程為狀態變數的一階微分方程組。設n階系統的狀態變數為x(t)、x(t)、…、x(t),激勵為e(t),則狀態方程的一般形式如下:
狀態方程[控制科學]
式中各係數均由系統的元件參數確定,對於線性非時變系統,它們都是常數;對於線性時變系統,它們中有的可以是時間函數。式(2.1)是單輸入的情況,如果有m個輸入e(t)、e(t)、…、e(t),則可得狀態方程的一般形式為
狀態方程[控制科學]
狀態方程[控制科學]
定義狀態矢量x(t)和狀態矢量的一階導數x'(t)分別為
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/me/c/mec51dce1fdb1dd4a7a7405845fb086dc.jpg)
狀態方程[控制科學]
再定義輸入矢量e(t)為
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m4/a/m4a470cb16ade978936d4034ff2bfffa1.jpg)
狀態方程[控制科學]
狀態方程[控制科學]
如果系統有q個輸出y(t),y(t),…,y(t),則輸出方程的矩陣形式為
狀態方程[控制科學]
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/ma/c/mac0fc5dc0f34711aa9f4eb461b7b7cb6.jpg)
狀態方程[控制科學]
狀態方程[控制科學]
對於線性時不變系統,上面所有係數矩陣為常數矩陣。式(2.6)、式(2.10)分別是狀態方程和輸出方程的矩陣形式。應用狀態方程和輸出方程的概念,可以研究許多複雜的工程問題。
離散時間系統狀態方程為:
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程為:
狀態方程[控制科學]
狀態方程[控制科學]
(1)齊次狀態方程的解:
考慮n階線性定常齊次方程 的解。
首先分析標量微分方程的解。設標量微分方程為
對式(2)取拉氏變換得;
取拉氏反變換,得。
標量微分方程可以認為是矩陣微分方程當n=1時的特徵,因此矩陣微分方程的解與標量微分方程應具有形式的不變性,由此得如下定理:
【定理1】 n階線性定常齊次狀態方程(1)的解為:
式中: 。
【推論1】 n階線性定常齊次狀態方程 的解為。
齊次狀態方程解的物理意義是e將系統從初始時刻t的初始狀態x轉移到時刻t的狀態x(t)。故e 又稱為定常系統的狀態轉移矩陣。
(狀態轉移矩陣有四種求法:即定義(矩陣指數定義)法、拉氏反變換法、特徵向量法和凱來-哈密頓(Cayly-Hamilton)法)
從上面得到兩個等式
其中,第一式為矩陣指數定義式,第二式可為e 的頻域求法或拉氏反變換法.
(2)非齊次狀態方程的解:
設n階非齊次方程
將狀態方程左乘e ,有
移項 積分,再移項左乘e ,得
【定理2】 n階線性定常非齊次方程(5)的解為
從非齊次狀態方程解的表達式可以看出其解是由齊次方程的解與控制u(t)的作用兩部分結合而成。
狀態方程[控制科學]
(3.1)定義法:
(3.2)拉氏變換法:
(3.3)特徵值法:
這種方法分兩種情況計算。
首先,考慮A的特徵值不重時(互異),設A的特徵值為λ(i = 1,2,...n),則可經過非奇異變換把A化成對角標準形,即:
根據e 的性質7寫出
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m0/2/m02f7504ef1ab7208b6544a699ad7cf4b.jpg)
狀態方程[控制科學]
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/mb/9/mb948cc5d4b0361fb59f4ccff5a6c49cc.jpg)
狀態方程[控制科學]
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/mf/1/mf148231075a50888708426d933f46b3f.jpg)
狀態方程[控制科學]
若矩陣A的具有重根時,用上述的方法也可以推導出:重根所對應的約當塊Aj的矩陣指數e 的分式為
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m5/4/m54972c6796f5988be8244e498d2d2721.jpg)
狀態方程[控制科學]
狀態方程[控制科學]
P陣的特徵向量的求法:
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m1/6/m161323a2941284fba4f4e77bf7502119.jpg)
狀態方程[控制科學]
註:在(13)式中將重根對應的特徵向量p,p,...p可放在P陣的前部,也可以放后,無嚴格規定。
(3.4)萊-哈密爾頓(Cayley-Hamilton)方法:
考慮A的特徵多項式
顯然對A的n個特徵值,有。
根據Cayley-Hamilton定理有
這裡可以看出矩陣A與λ具有同等地位。
移項
上式表明,是 的線性組合。
因此,可設
狀態方程[控制科學]
式中,是待定係數, 。
下面分兩種情況確定待定係數:
狀態方程[控制科學]
(1)A有n個不同特徵值,A的特徵值 與A具有同等地位,則有
狀態方程[控制科學]
這裡共有n個方程,可以唯一確定n個待定係數。
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
狀態方程[控制科學]
(2)當A的特徵值有重時,設A有p個互異特徵值,r個不同的重特徵值,且各重數為, 。若 是 重特徵值,則將 滿足的方程 對 求 次導,這樣共有 個獨立方程。一般地,設A的特徵值為 為單特徵值。其中,是 重特徵值,為 重特徵值。
狀態方程[控制科學]
有,則 由下面n個獨立方程確定:
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/mc/0/mc0ec871200c0659bb8c414fe97dd5df1.jpg)
狀態方程[控制科學]
對n階線性定常離散系統
其求解方法有兩種:
(1)遞推法:
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m2/1/m212b43201cb940aafbf49228cd9251d2.jpg)
狀態方程[控制科學]
Z是頻域解法。對式(17)作Z變換,有
移項,得
左乘,得
狀態方程[控制科學]
取,得
【定理3】n階線性定常離散系統式(17)的解為
![狀態方程[控制科學]](https://i1.twwiki.net/cover/w200/m3/5/m358340b5adc243f804342f5479288e3a.jpg)
狀態方程[控制科學]
基本信息
- 中文名
- 狀態方程
- 外文名
- state equation
- 適用領域
- 工業
- 提出時間
- 20世紀60年代初
- 表達式
- x'=Ax+Bu, y=Cx+Du
- 主要研究著作
- 《控制系統的一般理論》
- 性質
- 刻畫系統輸入和狀態關係的表達式