共找到5條詞條名為自由度的結果 展開
- 描述物體運動狀態的物理量
- 統計學的自由度
- 機械系統的自由度
- 力學
- 熱力學自由度
自由度
機械系統的自由度
根據機械原理,機構具有確定運動時所必須給定的獨立運動參數的數目(亦即為了使機構的位置得以確定,必須給定的獨立的廣義坐標的數目),稱為機構自由度(degree of freedom of mechanism),其數目常以F表示。
如果一個構件組合體的自由度,他就可以成為一個機構,即表明各構件間可有相對運動;如果,則它將是一個結構(structure),即已退化為一個構件。機構自由度又有平面機構自由度和空間機構自由度。一個原動件只能提供一個獨立參數。
一個桿件(剛體)在平面可以由其上任一點A的坐標x和y,以及通過A點的垂線AB與橫坐標軸的夾角等3個參數來決定,因此桿件具有3個自由度。
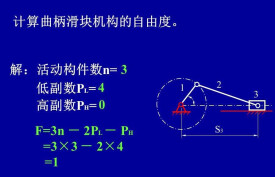
【計算公式】 n:活動構件數,PL:低副約束數Ph:高副約束數
計算平面機構自由度的注意事項:
1.複合鉸鏈 --兩個以上的構件在同一處以轉動副相聯。複合鉸鏈處理方法:如有K個構件在同一處形成複合鉸鏈,則其轉動副的數目為個。
2.局部自由度:構件局部運動所產生的自由度,它僅僅局限於該構件本身,而不影響其他構件的運動。局部自由度常發生在為減小高副磨損而將滑動摩擦變為滾動磨擦所增加的滾子處。處理方法:在計算自由度時,從機構自由度計算公式中將局部自由度減去。
3.虛約束 --對機構的運動實際不起作用的約束。計算自由度時應去掉虛約束。虛約束都是在一定的幾何條件下出現的。常見有以下幾種情況:
• 兩構件聯接前後,聯接點的軌跡重合。如:平行四邊形機構,火車輪,橢圓儀。
• 兩構件構成多個移動副,且導路平行。
• 兩構件構成多個轉動副,且同軸。
• 運動時,兩構件上的兩點距離始終不變。
• 對運動不起作用的對稱部分。如多個行星輪
• 兩構件構成高副,兩處接觸,且法線重合。如等寬凸輪
• 【注意】機構中出現虛約束是有條件的!虛約束一般有以下作用:改善機構受力情況;傳遞較大功率;
• 增加機構的剛度,如軸與軸承、機床導軌;使機構運動順利,避免運動不確定,如車輪。
一個桿件(剛體),在空間上完全沒有約束,那麼它可以在3個正交方向上平動,還可以以三個正交方向為軸進行轉動,那麼就有6個自由度。
空間機構自由度的計算:
第一種方法:
傳統方法,通過公式
也就是通過所有剛體的自由度數之和減去每一個運動副所約束的自由度數。這種方法的優點是,便於設計分析人員的分析與計算。尤其在平面機構的自由度分析上,通過計算者識別虛約束與局部自由度,幾乎可以完成大部分機構的自由度計算。然而對於空間機構來說,由於虛約束與局部自由度難以識別,而且機構本身的尺寸,約束的位置不同、機構的實際運動自由度會有很大的差異。該公式已經難以勝任空間機構的自由度計算任務。不過難以否認的是該公式在機械設計史上的突出貢獻,很多經典的機構,機械裝置都是基於該公式設計而成的。
第二種方法
通過構建機構的運動學分析方程並分析其秩來計算其自由度,或是拆分出機構的每一個閉鏈,通過虛位移矩陣法來分析機構自由度。此種方法的好處是在理論上可以完美的計算出機構的自由度,計算方法在理解上較為簡單。然而該種方法雖然理解簡單但計算過程本身較繁瑣,而且該方法適用於對於已設計出機構的分析,利用該公式進行機構設計並不太方便。不過這種方法也較為成熟,也最好理解,很多書籍上都有介紹。
第三種方法
對機構的Jacobian矩陣計算其零空間,來分析機構的自由度。這種方法雖然理論上也可以解決自由度計算但是應用較為少見。其一是零空間的計算十分困難,甚至利用軟體也難以解決。其二是該種方法也適用於對已有機構的分析計算,難以利用該方法實現創新。
第四種方法
基於群論、李代數、微分幾何的知識來解決自由度計算的問題。群論、李代數、微分幾何是解決複雜機構學問題的法寶。如果掌握,對於機構的設計與分析,並聯機構的設計及計算,甚至機構的概念設計都有著十分積極的意義。現代的機構學與機器人學很多理論都是基於此而形成的。然而此種方法對設計人員的知識水平要求較高,對於普通的設計人員以及大學本科生來說不太實用。
第五種方法
基於螺旋理論的自由度計算方法。旋量也是解決機構學問題的利器。該種方法雖然並不能完美的解決所有的自由度問題。但在理解上更接近於第一種。在理解難度上大於第二種,計算難度上小於第二種。可以對於機構的概念設計有潛移默化的影響。不過對於普通的設計人員與大學本科生來說,理解還是困難的。
總體來說,直到2015年還沒有機構自由度計算的完美解決方案
變自由度機構
某些特殊的機構由於自身特殊的性質在運動過程中自由度會發生變化。
比如變胞機構,欠驅動機構,以及一些轉向機構。
基本信息
- 中文名
- 自由度
- 外文名
- degree of freedom of mechanism
- 術語類別
- 物理術語
- 所屬學科
- 工學
- 表示符號
- F
- 理論依據
- 機械原理
- 分類
- 平面機構自由度,空間機構自由度