電磁波測距
電磁波測距
電磁波測距 electromagnetic distance measurement 電磁波測距是利用電磁波作為載波,經調製後由測線一端發射出去,由另一端反射或轉送回來,測定發射波與回波相隔的時間,以測量距離的方法。
目錄
紀始,雷達以及各種脈衝式和相位式導航系統的發展,促進了人們對電子測時技術、測相技術和高穩定度頻率源等領域的深入研究。在此基礎上,貝里斯特蘭德(E.Bergstrand)和沃德利(T.L.Wadley)分別於1948年和1956年研製成功了第一代光電測距儀和微波測距儀。隨著電子技術的高速發展,這些儀器不斷改進,現在已經達到了相當完善的程度,使大地測量和工程測量發生了 3個方面的變化:①三角測量中的起始邊長度,現在一律用電磁波測距儀直接測量,過去布設基線網推算起始邊長度的方法已成歷史;②導線測量、三邊測量和測邊測角布網方式的應用越來越廣泛,有逐漸取代三角測量的趨勢;③利用電子全站儀或速測儀,採取邊角測量方法加密大地控制網和布設高程導線,有很高的經濟效益(見三邊測量)。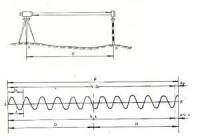
示意圖
磁波測距青藏高原布設了精密導線,作為國家大地網的一部分。
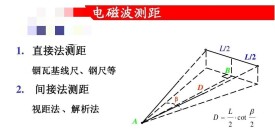
測距 磁波測距:脈衝測距測距。
脈衝測距法 由測線一端的儀器發射的光脈衝的一部分直接由儀器內部進入接收光電器件,作為參考脈衝;其餘發射出去的光脈衝經過測線另一端的反射鏡反射回來之後,也進入接收光電器件。測量參考脈衝同反射脈衝相隔的時間t,即可由下式求出距離D:
,
相位測距法 用高頻電流調製后的光波或微波從測線一端發射出去,由另一端返回后,用鑒相器測量發射波與回波之間的相位差嗘。若調製頻率為f,則電磁波往返經歷的時間為:
,
式中n是時間t中的整周數。將t代入到上列脈衝測距法的公式中,得距離D為:
,
式中λ是已知的調製波波長,相當於測量距離的尺子的長度,n相當於測程上的整尺數,是不足一個測尺長的尾數。
為了確定整尺數n,通常採用可變頻率法和多級固定頻率法。前者是使測距儀的調製頻率在一定範圍內連續變化,這就相當於連續改變測尺長度,使它恰好能量盡待測距離。測距時,逐次調變頻率,使不足整尺的尾數等於零。根據出現零的次數和相應的頻率值,就可以確定整測尺數n°當採用多級固定頻率法時,相當於採用幾根不同長度的測尺丈量同一距離。根據用不同頻率所測得的相位差,就可以解出整周數n,從而求得距離D。
相位差除了用鑒相器測量之外,還可採用可變光路法,即用儀器內部的光學系統改變接收信號的光程,使該信號延遲一段時間。電子儀錶指示發射信號與接收信號相位相同時,直接在刻劃尺上讀出尾數。此外,還可以用延遲電路來改變接收信號的相位,由該電路調整控制器上的分划,讀出尾數。
儀器 目前地面上的電磁波測距一般都採用相位測距法。
電磁波測距儀根據載波為光波或微波而有光電測距儀和微波測距儀之分。前者又因光源和電子部件的改進,發展成為激光測距儀和紅外測距儀。
光電測距儀 早期的光電測距儀採用電子管線路, 以白熾燈或高壓水銀燈作為光源,體型大,測程較短,而且只能在夜間觀測。60年代末出現了以氦氖激光器作光源、採用晶體管線路的激光測距儀,主機重量約20公斤,測程可達60公里,而且日夜都可以觀測,測距精度約為。70年代出現了通過雙載波測距、自動改正大氣折射影響的激光測距儀,測距精度又有了進一步的提高。1979年更出現了三波長測距儀,使測距精度達到了千萬分之一。
在發展激光測距儀的同時,60年代中期出現了以砷化鎵管作為光源的紅外測距儀。它的優點是體型小,發光效率高;更由於微型計算機和大規模集成電路的應用,再與電子經緯儀結合,於是形成了具備測距、測角、記錄、計算等多功能的測量系統,有人稱之為電子全站儀或電子速測儀。目前這種儀器的型號很多,測程一般可達5公里,有的更長,測距精度為,廣泛用於城市測量、工程測量和地形測量。
微波測距儀 原理是將測距頻率調製在載波上,由主台發射出去,經副台接收和轉送回來之後,測量調製波的相位。確定測線上整周期數n和相位差嗘/2π 的原理與光電測距相同。早期的微波測距儀為了測定相位差,使發射的調製波在陰極射線管上產生一個圓形掃跡;返回信號則變換成為脈衝,它使圓形掃跡產生一個缺口,其位置表示發射信號與返回信號的相位差。以後改用移相平衡原理測定相位差。從1956年到70年代中期,微波測距儀有了重大改進。它經歷了電子管、晶體管和集成電路3個階段,重量減輕,體積縮小,耗電量下降,並提高載波頻率以縮小波束角,提高調製頻率使測距讀數更為精確。此外,它還有全天候和測程遠(可達到100公里)的優點,因此是一種很方便的測距儀器。但因它的波束角比光電測距儀的大,多路徑效應嚴重,地表和地物的反射波使接收波的組成極為複雜,而又無法區分,給觀測結果帶來誤差。此外,大氣濕度對微波測距的影響相當大,而在野外濕度又難於測定。因此,微波測距的精度低於光電測距。(見彩圖)
基本信息
- 中文名
- 電磁波測距
- 外文名
- electromagnetic distance measurement
- 目的
- 測量距離
- 簡稱
- EDM
- 屬性
- 電磁波
- 原理
- 發射波與回波相隔的時間