角度交會法
一種水平夾角判讀方法
角度交會法是指從兩個(或三個)已知點測定已知方向與待定點方向之間的水平夾角,以交會出待定點位置的方法。
圖示
各類工程測量中,往往會涉及到點的平面位置放樣工作,即測設點的平面位置,就是根據施工場地原有的已知控制點,將圖紙上的設計點位按照其設計坐標在地面上標出其所對應的位置,作為後繼施工的依據。點的平面位置放樣的常用方法有直角坐標法、極坐標法、角度交會法、距離交會法以及全站儀坐標法。施工人員可根據
設計點位與已有控制點的平面位置關係,結合施工現場條件以及所使用的儀器等靈活採用相應的放樣方法。不同的放樣方法都必須計算相應的放樣數據,一般來說主要是水平距離和水平角,其中角度交會法主要是要計算角度,一般均利用坐標反算來實現,相比較而言,距離計算比較容易,而水平角計算稍微複雜一些,主要涉及到
與方位角的關係,而且由於放樣點與控制點的位置關係,導致水平角將來也會出現正撥和反撥兩種情況,這就使得不同情況下水平角的計算也不完全相同,本文將圍繞角度交會法放樣水平角正撥和反撥兩種情況下如何正確進行水平角的計算進行簡要闡述。
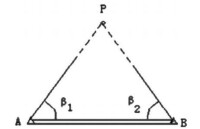
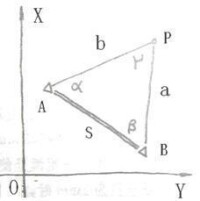
圖1 角度交會法放樣
(1)水平角為正撥時放樣數據的計算
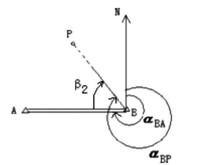
圖2 鄭潑水平角
表1 坐標象限角與坐標方位角關係
由於坐標方位角的取值範圍為0°~360°,如果使用普通計算器,對於該項計
算的 顯示往往是銳角,也就是象限角R,因此還需將象限角R轉換為方位角a。如果令,也稱為坐標增量,則可根據下列(表1)實現象限角與方位角的轉換。利用表1正確得出未知方向方位角后,即可根據,計算出放樣時所需要的水平角值。
(2)水平角為反撥時放樣數據的計算
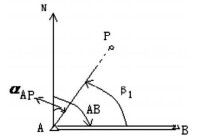
圖3 反撥水平角
由上述內容可知,角度交會法放樣中,如果未知方向在已知方向的右側,則放樣水平角時為正撥(即儀器由已知方向沿順時針方向放樣),反之如果未知方向在已知方向的左側,則放樣水平角時一般形成反撥(即儀器由已知方向沿逆時針方向放樣),這兩種情況下水平角計算有區別,對於正撥水平角為未知邊的方位角減去已知邊的方位角,而對於反撥,則水平角由已知邊的方位角減去未知邊的方位角。此結論也可推廣至極坐標法放樣中水平角的計算。在工程測量中,只要涉及到用方位角進行水平角的計算工作,一般都遵循這一結論。
在城市市政工程施工過程中,常因施工場地狹小、進場的機械設備及物資材料繁多等因素的影響而造成施工測量放線所必須的控制點被覆蓋、破壞、擾動以及控制點間難以通視、觀測邊長距離太短而不能滿足測量規範要求等情況在一定程度上降低了測量工作的效率。為了克服上述觀測條件的限制,提高測量工作的效率本文結合工程實例探討一種運用角度交會法進行測量放線的方法並對這種方法的可行性和可靠性進行理論分析。
南寧市地鐵一號線廣西大學站位於大學一明秀路口,車站全長,為地下二層島式站台車站共設個出人口及個風亭,車站主體及附屬結構均採用明挖順築法施工。施工場地運用圍擋與外界隔離,造成施工場地狹小、通視條件差但其周邊建築物如“時代天驕”、“世貿西城”、“一心製藥”等在施工區域內可視性很好。因此,在施工測量的過程中可充分利用周邊建築物上已有的垂直度好、穩定性強的避雷針和通信塔尖等尖狀地物作為加密控制點建立適當密度的控制網。建立好控制網后,在施工區域內架設好全站儀並選擇個相對位置適中的加密控制點運用測角後方交會法計算設站點坐標。最後只需完成全站儀的設站及定向工作后即可進行施工測量放線。
通過對角度交會法作業過程的分析可知,最終設站點的點位誤差主要受到基準點、點位誤差、測角前方交會觀測角、測量誤差及測角後方交會觀測角測量誤差的綜合影響。各種誤差經傳播擴大后其最終設站點點位精度能否滿足施工要求是本方法是否可行的關鍵。下面對測角前方交會和測角後方交會的測量精度進行分析。
實驗結果表明採用本文所述方法可滿足施工測量放線的精度要求且工作過程中無需跑鏡即可設站在一定程度上減少了作業人員的勞動強度,縮短了作業時間,提高了工作效率。但使用本方法時應注意以下事項:
(1)運用測角後方交會法推算設站點坐標時存在一個危險圓位置作業時應通過計算檢驗設站點是否位於危險圓上;
(2)加密控制點應選擇在位置明顯、容易判別、可見範圍廣的建築物上;
(3)作業過程中應按式計算設站點點位中誤差,以估算設站位置能否達到施工放樣的精度要求;
(4)設站及定向工作完成後,應選擇其它加密控制點進行對方位角的複核,以免出錯而未被發現。

基本信息
- 中文名
- 角度交會法
- 外文名
- angular inter section method
- 分類
- 前方交會、後方交會、側方交會
- 作用
- 計算待定點位置
- 所屬學科
- 數學
- 應用
- 工程測量
- 描述
- 已知與待定點方向之間的水平夾角