達芬奇機器人
達芬奇機器人
達芬奇機器人 (Leonardo's robot)是由列奧納多·達芬奇大約於1495年所設計的仿人型機械。
這個機器人的設計筆記出現於在1950年代被發現的手稿中,但沒有人知道是否有人嘗試把它製造出來。

仿製的達芬奇機器人
在達·芬奇留下的設計草圖中,該機器人設計成一個騎士的模樣,身穿德國—義大利式的中世紀盔甲。明顯地,它可以做出一些動作,包括坐起、擺動雙手、搖頭及張開嘴巴。就如《維特魯威人》一樣,此機器人也是達芬奇在解剖研究方面有關人體比例的部分成果。
根據達·芬奇的科學手稿《大西洋古抄本》中的該設計草圖和其他手稿,義大利佛羅倫薩市“泰克諾藝術”公司的工程師們耗時15年,於2010年複製出了這件發明,並命名為“機器武士”。“機器武士”靠風能或水力驅動。2010年5月,“機器武士”和其他達·芬奇的神奇發明在澳大利亞悉尼市政廳內首次展出。
達·芬奇設計草圖
達·芬奇自畫像
列奧納多·達·芬奇不僅是一位偉大的藝術家,也痴迷於機械和其他自然科學,他的很多超越時代的觀念改變了世界。
在他那個時代,他“發明”出許多令人匪夷所思的“現代科技”,其中包括自行車、潛水呼吸器、懸掛式滑翔機、降落傘、潛水艇、軍用坦克、飛行機器甚至機器人的模型。
然而,達·芬奇的多數“發明”只停留在圖紙上,這些設計草圖後來大多被編進了達·芬奇的科學手稿《大西洋古抄本》。後世科學家一直試圖根據達·芬奇故鄉的達·芬奇博物館收藏的《大西洋古抄本》中的草圖複製出一些達·芬奇的發明。身為左撇子的達·芬奇,一生中都以鏡像寫字。對左手寫作者來說,將羽毛筆由右向左拉過來寫比由左向右推過去寫容易,而且不會將剛寫好的字弄糊。但這樣的書寫習慣卻給後人解讀他的手稿帶來了諸多困難。直到十七世紀,才有人開始解讀這些結合了大量筆記和繪圖的手稿。而且,人們發現達·芬奇的許多發明都暗藏“缺陷”,從而使這些發明即使被複制出來,也無法派上用場。研究人員相信,這顯然是達·芬奇“刻意為之”,一是保護自己的“知識產權”,二是擔心被用於戰爭目的。

達·芬奇機器人模型
據“泰克諾藝術”公司負責人蓋布里爾·尼科萊稱,達·芬奇草圖中的繩索、滑輪、齒輪和彈簧,在普通人眼中就是一些簡單的零件,但它們卻是“機器武士”的手臂和肌腱。
而讓這個用木頭零件拼湊的標本“活”起來,則運用到了達·芬奇手稿中的另一張“鼓狀圓柱體”設計圖。
工程師們根據設計圖造出了一個上面鑿有凹槽的鼓狀圓柱體,並將它和“機器武士”的手臂連接起來。
當轉動機器人身後的動力軸時,機器人便能夠揮動手臂做出貌似連續擊鼓的完美動作。當把該鼓狀圓柱體安裝到“機器武士”的胸部時,再轉動動力軸時,機器人能做出流暢協調的舉手抬腿動作。

“機器武士”內部細節

達·芬奇機器人模型
找出機器獅的設計圖,造出達·芬奇機器獅。
據悉,在達·芬奇的眾多發明中,機器人並不是他最滿意的作品,他最偉大的發明是一個被稱做“雄蜂”的飛行器和一隻能自由漫步的“機器獅”。有記載稱,達·芬奇在1515年將一隻機器獅贈給法國國王,當後者對著機器獅抽上三鞭,獅子的胸部就會打開,開出一朵“鳶尾花”。
達芬奇機器人手術系統以麻省理工學院研發的機器人外科手術技術為基礎。Intuitive Surgical公司隨後與IBM、麻省理工學院和Heartport公司聯手對該系統進行了進一步開發。FDA已經批准將達芬奇機器人手術系統用於成人和兒童的普通外科、胸外科、泌尿外科、婦產科、頭頸外科以及心臟手術。達芬奇外科手術系統是一種高級機器人平台(簡稱
),其設計的理念是通過使用微創的方法,實施複雜的外科手術。

達芬奇智能微創手術系統
達芬奇機器人由三部分組成:外科醫生控制台;床旁機械臂系統;成像系統。
一、外科醫生控制台
主刀醫生坐在控制台中,位於手術室無菌區之外,使用雙手(通過操作兩個主控制器)及腳(通過腳踏板)來控制器械和一個三維高清內窺鏡。正如在立體目鏡中看到的那樣,手術器械尖端與外科醫生的雙手同步運動。
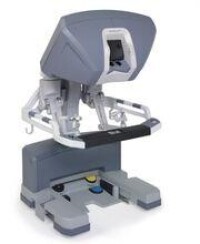
外科醫生控制台
床旁機械臂系統(Patient Cart)是外科手術機器人的操作部件,其主要功能是為器械臂和攝像臂提供支撐。助手醫生在無菌區內的床旁機械臂系統邊工作,負責更換器械和內窺鏡,協助主刀醫生完成手術。為了確保患者安全,助手醫生比主刀醫生對於床旁機械臂系統的運動具有更高優先控制權。

床旁機械臂系統
成像系統(Video Cart)內裝有外科手術機器人的核心處理器以及圖象處理設備,在手術過程中位於無菌區外,可由巡迴護士操作,並可放置各類輔助手術設備。外科手術機器人的內窺鏡為高解析度三維(3D)鏡頭,對手術視野具有10倍以上的放大倍數,能為主刀醫生帶來患者體腔內三維立體高清影像,使主刀醫生較普通腹腔鏡手術更能把握操作距離,更能辨認解剖結構,提升了手術精確度。

達芬奇智能微創手術成像系統
達芬奇手術機器人可以治療哪些疾病:
1、心胸外科:
開放式心胸外科手術需要開胸,分離胸骨,遊離肋骨,在體外循環下完成,手術創傷大,手術風險高,術后恢復時間長。胸腔鏡已用於肺葉切除、冠脈搭橋等心胸外科手術,這種微創的手術方法不用開胸,僅需在肋間作幾個小切口,就能完成手術操作,病人痛苦小,術后恢復快。但其適用範圍有限,無法完成一些解剖結構複雜的手術,因而開展並不普及。手術機器人最早於1999年完成了首例冠狀動脈旁路移植術,2003年起用於各種心臟外科直視手術。它在不破壞胸廓完整性的前提下,能精準地完成手術操作,而且適應證範圍廣泛,幾乎涵蓋所有的心胸外科手術,如心臟外科的全腔內心臟搭橋、心臟不停跳取乳內動脈、二尖瓣成型、二尖瓣置換、房間隔缺損修補、三尖瓣成型、心臟腫瘤切除,胸外科的肺葉切除術、食管癌切除、胸腺切除術和食管失弛緩症的治療等。其中,全腔內心臟搭橋手術和二尖瓣成型手術是手術機器人在心胸外科開展的代表手術。臨床應用表明手術機器人的手術安全性高,療效明顯好於開放式手術和胸腔鏡手術
。
2、泌尿外科:
腹腔鏡技術被越來越廣泛地應用於泌尿外科手術,這一微創的手術方式適用於許多常規的泌尿外科手術,如腎切除、腎上腺切除、輸尿管切開、膀胱腫瘤切除、前列腺腫瘤切除等。但由於泌尿系統解剖學上的特殊性,限制了腹腔鏡技術的普及和推廣,一些複雜的手術往往難以掌握,而且手術併發症發生率較高。目前國內的孫穎浩教授已經能很好的運用手術機器人獨特的深部操作和精細操作的技術優勢廣泛應用於各種泌尿外科手術,包括前列腺癌根治、腎切除、腎盂成形、全膀胱切除、輸精管吻合、輸尿管成形、活體供腎切取等。其中,前列腺癌根治術是最能體現其技術優勢的手術,手術機器人提供寬闊視野和準確、靈活的控制能力,能夠清楚呈現組織、器官的解剖構造和神經血管束的走行,精細的分離有利於淋巴結的清掃,準確的縫合保證了吻合的高質量,手術中精確保留前列腺側筋膜,有利於減少手術對患者性生活的影響,術后病理檢查和隨訪都顯示了良好的腫瘤切除效果。自2000年開展首例手術機器人前列腺癌根治性切除以來,該術式在國外得到迅速推廣,在北歐國家超過一半以上的前列腺癌根治手術由手術機器人完成,而在美國,這一比例更是高達90%,已成為前列腺癌根治手術的“金標準”
。
3、婦科:
以腹腔鏡技術為代表的微創手術方式正逐步取代傳統的開放式手術,應用於從卵巢囊腫開窗引流到全子宮切除、盆腔淋巴結清掃的各種婦科手術中。但是大部分的婦科手術需要在狹窄的盆腔內完成,手術操作的視野和空間都非常有限,這使腹腔鏡器械的活動自由度受限,且操作的動作幅度不穩定,難以完成一些需要精細分離、縫合及淋巴結清掃的操作,限制了腹腔鏡技術在複雜婦科手術中的應用。da Vinci手術機器人於2005年被美國FDA批准用於婦科微創手術,此後,該技術迅速普及。臨床應用結果表明手術機器人手術具有更高的精確性、更好的操控性,能在骨盆中完成精細的操作,有利於功能的重建和盆腔淋巴結清掃。國外報道較多的是用於宮頸癌根治手術,該手術需要運用精確的分離技術進行韌帶切斷、輸尿管遊離、淋巴結清掃等,可以充分發揮手術機器人的技術優勢,達到理想的手術效果。對於需要進行比較複雜縫合技術的手術,如複雜的子宮肌瘤切除術,運用手術機器人靈巧的手術臂高質量地完成縫合,有助於減少術后併發症的發生。此外,報道的手術機器人手術還有全子宮切除、輸卵管再通吻合、卵巢切除和盆底重建等。
4、腹部外科:
早期手術機器人主要用於腹部外科,開展了一些比較簡單的手術,但並沒有表現出比腹腔鏡手術更明顯的優勢,因而未推廣應用。隨著手術機器人在其它外科領域的成功開展,其在腹部外科的應用和研究又重新活躍,迅速開展了各種手術。根據其對第二代腹腔鏡手術的影響程度,可將手術機器人腹部外科手術分為三類:①對常規開展的腹腔鏡手術基本沒有影響的機器人手術,例如機器人膽囊切除、抗反流的胃底摺疊、疝修補、闌尾切除、可調節捆紮帶胃減容和良性胃腸腫瘤的切除等。②可顯著提高腹腔鏡手術效果的機器人手術,範圍比較廣泛,包括機器人肝葉切除、複雜膽道重建、胃旁路減重、胃癌根治、結直腸癌根治、胰腺部分切除和胰十二指腸切除等。③在腹腔鏡下難以完成,唯有手術機器人能精準完成的一些手術,例如內臟動脈瘤切除吻合、細口徑的膽管空場吻合、複雜的腹腔內淋巴結清掃等。
2015年5月,一段機器人縫合葡萄皮的視頻在網路走紅。視頻中,一個名為“達芬奇系統”的機器人先是撕開了一個葡萄的皮,然後又將葡萄皮完好地縫合。“達芬奇系統”是當今世界上最先進的微創外科技術平台。該系統充分結合了美國航天航空局和眾多研究機構開發的先進技術,代表了當今世界外科手術機器人的最高水平。之所以取名“達芬奇系統”,是因為製造者認為達·芬奇於1495年即設計了仿人型機械,因此是世界上第一台機器人的發明者。截至2014年12月31日,全球共有3266台“達芬奇系統”,其中美國2223台,歐洲549台,亞洲350台
。

基本信息
- 中文名
- 達芬奇機器人
- 外文名
- Leonardo's robot
- 時間
- 1495年
- 屬性
- 仿人型機械
- 筆記發現時間
- 1950年代
- 設計
- 列奧納多·達芬奇