ASIMO
ASIMO
ASIMO(日本語:アシモ,羅馬音:Ashimo,中文:阿西莫),日本本田技研工業株式會社研製的仿人機器人。這款機器人模仿人類的動作更精準,以達到幫助人類,特別是行動不便者的設計目的。
現在的“阿西莫”不但能跑能走、上下階梯,還會踢足球和開瓶倒茶倒水,動作十分靈巧。截至2013年,ASIMO是最先進的仿人行走機器人。

本田的ASIMO機器人
本田公司投入無數科技研究心血的結晶——全球最早具備人類雙足行走能力的類人型機器人阿西莫(ASIMO,Advanced Step Innovative Mobility,高級步行創新移動機器人),以憨厚可愛的造型博得許多人的喜愛,眾多的類人功能也不斷地衝擊著人們的想象,似乎科幻電影中的情節正在一步步變成現實。
從2000年10月31日誕生,ASIMO的進步可以用神速來形容,2012最新版的ASIMO,除具備了行走功能與各種人類肢體動作之外,更具備了人工智慧,可以預先設定動作,還能依據人類的聲音、手勢等指令,來從事相應動作,此外,他還具備了基本的記憶與辨識能力。
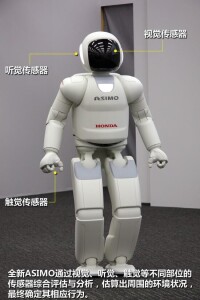
ASIMO感測器圖片
誕生日期第一代 2000年10月31日 第二代 2006年 第三代 2011年
身高 第一代120cm 第二代130cm
體重 第一代 52公斤 第二代 54公斤 第三代 48公斤
行走速度 第一代 0-1.6公里/小時 第二代 0-2.7km/h 第三代 0-9km/h
行走範圍 範圍可調整,步幅可調整
抓握力 0.5公斤/手(每隻手5個手指)
作動器伺服電機 + 諧波減速器 + 驅動單元
控制裝置 行走/操作控制單元,無線發送單元
感測器 腳部 六軸向腳部方位感測器 軀體陀螺儀和加速感測器
電源部分 38.4V/10AH(鎳鋅)
操作部分 操縱台和便攜控制器
(類似人類的關節)第一代 26個自由度 第二代 34個自由度 第三代 57個自由度
第一代
頭部
頸關節(U/D,RT) *1 2 DOF
臂
肩關節(F/B,U/D,RT) 3 DOF
肘關節(F/B) 1 DOF
腕關節(RT) 1 DOF
5 DOF×2手臂 = 10 DOF
手
五個手指(抓握) 1 DOF
1 DOF×2手 = 2 DOF
腿
髖關節(F/B,L/R,RT) 3 DOF
膝關節(F/B) 1 DOF
踝關節(F/B,L/R) 2 DOF
6 DOF×2腿 = 12 DOF
第二代
腰部旋轉關節:奔跑或步行時,通過手腕部位的擺動,以及腰部積極地旋轉,消除腳部擺動所產生的反作用力,從而提高步行速度。
手腕彎曲關節:在手腕部位再增加2個軸,使手腕能夠柔軟、靈活地活動
拇指關節:原來使用1個馬達驅動5個手指,為了使拇指能夠獨立活動,再增加1個馬達,使得ASIMO能夠拿各種各樣的東西。
頭部關節:在頭部關節部位再增加1個軸,以增加頭部的表達能力。
在實現機器人的奔跑方面,面臨著2大課題。一個是正確地吸收飛躍和著陸時的衝擊,另一個是防止高速帶來的旋轉和打滑。
1、正確地吸收飛躍和著陸時的衝擊
實現機器人的奔跑,要在極短的周期內無間歇地反覆進行足部的踢腿、邁步、著地動作,同時,還必須要吸收足部在著地瞬間產生的衝擊。 Honda利用新開發的高速運算處理電路、高速應答/高功率馬達驅動裝置、輕型/高剛性的腳部構造等,設計、開發出性能高於以往4倍以上的高精度/高速應答硬體。
2、防止旋轉、打滑
在足部離開地面之前的瞬間和離開地面之後,由於足底和地面間的壓力很小,所以很容易發生旋轉和打滑。克服旋轉和打滑,成為在提高奔跑速度方面所面臨的控制上的最大課題。對此,Honda在獨創的雙足步行控制理論的基礎上,積極地運用上半身的彎曲和旋轉,開發出既能防止打滑又能平穩奔跑的新型控制理論。
由此,ASIMO實現了時速達6km/h的像人類一樣的平穩直線奔跑。而且,步行速度也由原來的1.6km/h提高到2.7km/h。另外,人類在奔跑時,邁步的時間周期為0.2-0.4秒,雙足懸空的時間(跳躍時間)為0.05-0.1秒。ASIMO的邁步時間周期為0.36秒,跳躍時間為0.05秒,與人類的慢跑速度相同。
眼觀六路
ASIMO利用其身上安裝的感測器,擁有360度全方位感應,可以辨識出附近的人和物體。配合特別的視覺感應器,他可以閱讀人類身上的識別卡片,甚至認出從背後走過來的人,真正做到眼觀六路。當他識別出合法人員后,還可以自動轉身,與之並肩牽手前進。在行進中,ASIMO還能自動調節步行速度配合同行者。和人握手時,他能通過手腕上的力量感應器,測試人手的力量強度和方向,隨時按照人類的動作變化作出調整,避免用力太大捏傷人類。
ASIMO裝載的大量感測器,既包括傳統人類的感測器,也擁有一些超越人類的特殊感應器,能夠迅速地了解周圍情況,在複雜的環境下也能快速順暢地移動。
● 視覺感應器:其眼部攝影機通過連續拍攝圖片,再與資料庫內容作比較,以輪廓的特徵識別人類及辨別來者身份;
●水平感應器:由紅外線感應器和CCD攝像機構成的sensymg系統共同工作,可避開障礙物。
● 超音波感應器:以音波測量3m範圍內的物體,即使在毫無燈光的黑暗中行走也完全無礙。
接待員
ASIMO已被投放應用,如日本的IBM等七家企業就租用了ASIMO作為接待員。
ASIMO
ASIMO能以頭部的眼球運動記錄器和手腕的力覺感應器探測人的活動範圍,端盤子、送咖啡等動作根本難不倒他。放下盤子的時候,他會先測試桌子的高度,然後再雙腳彎曲把盤子準確地放在桌子上,當然,受到身高和手臂彎曲角度限制,ASIMO無法把盤子放到過高的地方。
如果在搬運的過程中受到衝撞,ASIMO會啟動全身的震動防護系統,避免盤子跌落。萬一真的跌落,依據手部感測器測試的懸掛重量,他也可以作出判斷,立即停止步行,防止踩到盤子。
在推手推車時,ASIMO可以在力量感測器的幫助下,調整用力的方向,還能自由地減速、轉向、向正側面和斜向移動,他甚至可以沿著一定路線來推車。但是他的力氣很小,只能推動約10千克的小車,指望他作為殘疾人助動暫時還不現實。但由於ASIMO已經具有相當的智能和多種活動能力,作為展館的導遊還是綽綽有餘的。
做運動

ASIMO運動性能
作為iWalk(intelligent Realtime Flexible Walking,智能實時自由步行)類型機器人,在兩足步行的狀態下,不可避免會發生打滑並摔倒在地的情況,ASIMO可是昂貴的產品,摔一下可讓人心痛了。同時,也是為了使他在旋轉時姿勢更穩定,06版ASIMO加入了新的姿勢控制系統。因此,他能夠在兩腳盡量抬起的同時,積極地控制姿勢的傾斜,甚至創造性地做到了一段時間內雙腳騰空。這種如同人類跑步的設計,使ASIMO行進的時速從 3 公里倍增至6公里,已經達到普通人慢走的速度了,實在是激奮人心的變化。
ASIMO快速轉彎的時候,他會自動向內不同角度地傾斜身體,控制重心以便轉身時利用離心力平衡身姿,通過巧妙的控制,輕易地繞開障礙。ASIMO身體傾斜轉身快跑時,他那滑稽的姿態不僅讓人忍俊不禁,還讓人們對科技的力量感到驚奇。也許未來會出現機器人跑步競賽呢!
ASIMO 2013版 在運動方面有了長足的進步,腿部的運動性能尤為明顯。科研人員增強了其腿部的能力,ASIMO可以在運動過程中改變其腳部的落地位置,並且還可以將走路、向前跑、倒退跑這幾個動作連續得非常自然而沒有明顯的停頓,還可以單腿連續跳躍或進行雙腿的連續跳躍。正因為有了這樣敏捷的移動性,ASIMO可以應對外界的實際情況表現出更為豐富的適應性行為,例如在ASIMO行進在並不平坦的路面上時,依舊可以保持住穩健的行走姿態。以上這些表現都是前幾代ASIMO不具備的能力。
摩托車的豎直角度和傾斜角度被裝置在車體內部的陀螺儀和加速度檢測儀隨時捕捉著數據,通過準確地計算,摩托車的發動機會根據車體姿態的變化隨時修改車輛的動力輸出,確保駕駛者可以在最安全的保護下發揮出車輛的潛質。
這其中起到關鍵作用的陀螺儀和加速度檢測儀元件正是裝配在全新一代ASIMO機器人中的重要配件,可以說,正是因為在ASIMO中的突破性研發,造就了在2011年度MOTOGP大獎賽上本田RC212V的最終奪冠。
自律型說明功能
ASIMO不但可以通過捕捉周圍的人的位置和動作判斷情況,還可以同周圍的人進行溝通交流。ASIMO還可以對向其走來的人群的行動路線進行預估判斷,可以大約判斷出接下來幾秒鐘行人可能行進的路線、軌跡,通過自身的系統計算並規劃出一條自己的替代路線,可避免與人類發生碰撞。
ASIMO可以瞬間把握周圍觀眾的位置和動作,並可以在周圍的觀眾中挑選出第一個舉手的人來向它提問問題。
開發方向
作為智能導遊向遊客講解相關內容。ASIMO將來將在飛機場、車站等地擔任道路引導員。
溝通範圍
ASIMO的溝通系統至2013年只能提問預設的問題,也就是說從已知的問題中提問,而回答的答案也是設定好的。
BUG
當觀眾拿智能手機給它拍照時,ASIMO卻瞬間凌亂了,由於無法辨別觀眾是在拍照還是在舉手問問題,它一直不停的重複“誰要問ASIMO問題?誰要問ASIMO問題?誰要問ASIMO問題?”
改善的任務執行能力
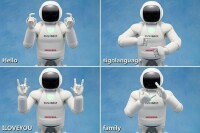
ASIMO手語

本田機器人發展史
E0首次運用了雙足步行的原理,根據直線的靜態步行來移動,成功使兩腿交替行走,但每步移動花費時間為5秒鐘,真是名符其實的龜速。
為了能使他行走在凹凸不平的路和坡道上,更為了加快行走速度,本田後來又提出了活動步行方式,機器人會不停地改變重心,以應付各種複雜的路面情況。為了實現活動步行,本田徹底了研究人類和其他動物的步行方式,特別調查了雙足步行必要的關節的配置和活動,使1987年誕生的E2首次實現了時速超過1公里,達到1.2公里的時速。更重要的是,還能適應人類特殊的生活環境—樓梯。
1991~1993年誕生的E4/5/6,由於加入了平衡控制技術,在步行時主體動作能保持穩定,上樓梯和走斜坡時再也不容易摔倒。
誕生於1993~1997年的P1/2/3,可以說是成了真正意義上的機器“人”,因為,嚴格來說,在P1之前的E系列,只能算是機械腿,到了P1才是真正地加入了上身,模擬人類全身運動的機器人。他可是個超大個兒,身高1.9米,體重175千克。電源和控制計算機都是放在主體之外,可以實現開關門、抓東西搬運等動作。
1996年發布的P2是世界首個類人智能雙足步行機器人,而且,由於把主機、控制馬達、電池、無線通訊等必要的機器全部藏起來,不僅實現了無線遙控,還使他在外觀上比較“光鮮”。1997年完成的P3比他的“兄弟”P1和P2乖巧玲瓏得多,身高只有1.6米,體重僅為130千克,這要得益於零配件材料的改良,而且在電腦實現分散型的控制之後,機器人滿足了小型化和輕量化的要求,更利於融入人類的生活。
“自動化機器人”發展為“具備主動判斷的機器人”
Honda的工程師們在項目初始階段花費了大量的時間研究了昆蟲,哺乳動物的腿部移動,甚至登山運動員在爬山時的腿部運動方式。這些研究幫助工程師們更好的了解我們在行走過程中發生的一切,特別是關節處的運動。比如,我們在行走的時候會移動我們的重心,並且前後擺動雙手來平衡我們的身體。這些構成了ASIMO行走的基礎方式。在行走過程中,我們的腳趾也扮演了非常重要的角色,在平衡我們身體上起了很大的作用。在ASIMO的腳上也有類似的機理,而且還使用了吸震材料來吸收行走過程中產生的對關節的衝擊力,就像人類的軟組織一樣。
ASIMO和人類一樣,有髖關節,膝關節和足關節。機器人中的關節一般用“自由度”來表示。一個自由度表示一個運動可以或者向上,或者向下,或者向右,或者向左。ASIMO擁有26個自由度,分散在身體的不同部位。其中脖子有2個自由度,每條手臂有6個自由度,每條腿也有6個自由度。腿上自由度的數量是根據人類行走,上下樓梯所需要的關節數研究出來的。
類似人類的步行方式
ASIMO
為了實現這些,ASIMO的工程師們需要考慮ASIMO在行走中產生的慣性力。當機器人行走時,它將受到由地球引力,以及加速或減速行進所引起的慣性力的影響。這些力的總和被稱之為總慣性力。當機器人的腳接觸地面時,它將受到來自地面反作用力的影響,這個力稱之為地面反作用力。所有這些力都必須要被平衡掉,而ASIMO的控制目標就是要找到一個姿勢能夠平衡掉所有的力。這稱做"zero moment point" (ZMP)。當機器人保持最佳平衡狀態的情況下行走時,軸向目標總慣性力與實際地面反作用力相等。相應地,目標ZMP與地面反作用力的中心點也重合。當機器人行走在不平坦的地面時,軸向目標總慣性力與實際的地面反作用力將會錯位,因而會失去平衡,產生造成跌倒的力。跌倒力的大小與目標ZMP和地面反作用力中心點的錯位程度相對應。簡而言之,目標ZMP和地面反作用力中心點的錯位是造成失去平衡的主要原因。假若Honda機器人失去平衡有可能跌倒時,下述三個控制系統將起作用,以防止跌倒,並保持繼續行走狀態。
地面反作用力控制:腳底要能夠適應地面的不平整,同時還要能穩定的站住。
目標ZMP控制:當由於種種原因造成ASIMO無法站立,並開始傾倒的時候,需要控制他的上肢反方向運動來控制即將產生的摔跤,同時還要加快步速來平衡身體。
落腳點控制:當目標ZMP控制被激活的時候,ASIMO需要調節每步的間距來滿足當時身體的位置,速度和步長之間的關係。
穩步的行走
ASIMO能夠感應到即將摔倒的情況,並能夠很快對此做出反應;但是ASIMO的工程師想要更多的功能。他們不但想讓ASIMO能夠行走的更順暢,還想讓ASIMO能夠在不停止的情況下轉身,絕大多數其它類人機器人無法做到這一點。
當我們走到彎角處需要轉身的時候,我們將我們身體的重心移到轉身的位置。ASIMO使用了一種叫做“動作預測控制”,也叫做“iWalk”技術來實現。ASIMO需要預測轉身所需要的重心的移動的位置以及持續時間。由於這個技術是實時(Real Time)技術,因此ASIMO能夠不需要停止就能夠轉身,實現邊走邊轉身。
上下樓梯
上下樓梯的動作如果只是靠事先的程序輸入的話絕對不可能實現。即使是輸入了階梯的高度及前後的距離,如果多達29層的話,也會因誤差累積而無法正常走下來。為此,Honda在ASIMO的每隻腳上,都裝了一個6軸力感測器,用來監測每一步的穩定程度。再結合陀螺儀和加速度感測器,ASIMO使用了獨特的數學演演算法來讓他上下樓梯,並能夠上下斜坡而如履平地。Honda的工程通過使其腳內側不緊貼地面、腳趾比台階邊緣向前探出少許這樣的站立方式來探測出台階的邊緣。在這一狀態下,如果通過腳底的壓力感測器進行壓力分佈測量的話,可以預先測出邊緣的位置。下樓梯時的著地點也可以同樣進行預測。雖然操作人員向ASIMO輸入了樓梯大致的高度,但是最終則是通過 ASIMO足底的感測器來確認樓梯位置的。不只是下樓梯,ASIMO還能夠在斜坡上轉彎。這是由於ASIMO的每一步都要變換姿勢,並改變與ZMP的關係,較下樓梯難度更大。下樓梯與在斜坡轉彎使用了相同的演演算法,因此不需要改變模式。
單腳站立
在任意狀態下機器人可以用單腿站立並保持身體平衡,這需要機器人擁有高水平的姿態平衡能力。

ASIMO圖片合集
新的ASIMO已經在行走能力上又有了新的突破,2004年12月發布的新型ASIMO已經能夠達到每小時6KM的奔跑速度以及迂迴行走。同時其關節自由度也達到了34個。新開發的技術根據其官方網站的描述為:
主要新技術:
1、新姿勢控制技術
為了防止高速移動產生的足部打滑和空中旋轉,保持平衡狀態,Honda通過利用上半身彎曲和旋轉的新姿勢控制理論和新開發的高速應答硬體等,使ASIMO的最大奔跑速度達到了3km/h。同時,步行速度也由原來的1.6km/h提高到2.5km/h。
2、自律性的連續移動技術
通過地面感測器獲得的周圍環境信息和預先錄入的地圖信息等,ASIMO能夠在步行的同時修正路線偏差,途中無需停歇地直接移動到目的地。
通過地面感測器和頭部視覺感測器發現障礙物時,ASIMO可以自身判斷,迂迴選擇其他路線。
3、配合人的活動而連貫活動的技術
ASIMO通過頭部視覺感測器、手腕部位新增加的腕力感測器等檢測人的動作,可以進行物品交接,或配合人的動作而握手,而且能夠朝著手被牽引的方向邁步等,實現了與人相配合的動作。
基本信息
- 類型
- 機器人
- 體重
- 48公斤
- 身高
- 1.3米
- 行走速度
- 0-9km/h