共找到2條詞條名為歐拉角的結果 展開
- 物理學名詞
- 機體坐標系y軸與水平面的夾角
歐拉角
物理學名詞
歐拉角用來唯一地確定定點轉動剛體位置的三個一組獨立角參量,由章動角θ、旋進角(即進動角)ψ和自轉角j組成,為歐拉首先提出而得名。萊昂哈德·歐拉用歐拉角來描述剛體在三維歐幾里得空間的取向。對於任何參考系,一個剛體的取向,是依照順序,從這參考系,做三個歐拉角的旋轉而設定的。所以,剛體的取向可以用三個基本旋轉矩陣來決定。換句話說,任何關於剛體旋轉的旋轉矩陣是由三個基本旋轉矩陣複合而成的。
歐拉角
若令Oˊyˊzˊ的原始位置重合於Oxyz,經過相繼繞Oz、ON和Oz'的三次轉動、、后,剛體將轉到圖示的任意位置(見剛體定點轉動)。變換關係可寫為:,
式中R、Z ´、N、Z是轉動運算元,並可用矩陣表示如下:
在進行轉動運算元的乘法運算時,應從最右端做起。
如果剛體繞通過定點O的某一軸線以角速度ω轉動,而ω在與剛體固連的活動坐標系Ox'y'z'上的投影為、、,則它們可用歐拉角及其微商表示如下:
,
,
。
反變換隻須在同名坐標間對調記號。
由上式可以看出,如果已知、、和時間的關係,則可用上式計算角速度在活動坐標軸上的三個分量;反之,如在任一瞬時已知t和的各個分量,也可利用上式求出、、和時間t的關係,因而也就決定了剛體運動。我們通常把上式叫做歐拉運動學方程。
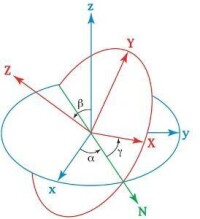
對於在三維空間里的一個參考系,任何坐標系的取向,都可以用三個歐拉角來表現。參考系又稱為實驗室參
考系,是靜止不動的。而坐標系則固定於剛體,隨著剛體的旋轉而旋轉。
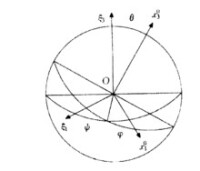
參閱右圖。設定 xyz-軸為參考系的參考軸。稱 xy-平面與 XY-平面的相交為交點線,用英文字母(N)代表。zxz 順規的歐拉角可以靜態地這樣定義:
是 x-軸與交點線的夾角, 是 z-軸與Z-軸的夾角,是交點線與X-軸的夾角。
很可惜地,對於夾角的順序和標記,夾角的兩個軸的指定,並沒有任何常規。科學家對此從未達成共識。每當用到歐拉角時,我們必須明確的表示出夾角的順序,指定其參考軸。
實際上,有許多方法可以設定兩個坐標系的相對取向。歐拉角方法只是其中的一種。此外,不同的作者會用不同組合的歐拉角來描述,或用不同的名字表示同樣的歐拉角。因此,使用歐拉角前,必須先做好明確的定義。
我們也可以給予歐拉角兩種不同的動態定義。一種是繞著固定於剛體的坐標軸的三個旋轉的複合;另外一種是繞著實驗室參考軸的三個旋轉的複合。用動態的定義,我們能更了解,歐拉角在物理上的含義與應用。特別注意,以下的描述,XYZ 坐標軸是旋轉的剛體坐標軸;而 xyz 坐標軸是靜止不動的實驗室參考軸。
歐拉角
歐拉角在SO(3)上,形成了一個坐標卡(chart) ;SO(3)是在三維空間里的旋轉的特殊正交群。這坐標卡是平滑的,除了一個極坐標式的奇點在 。
類似的三個角的分解也可以應用到SU(2);複數二維空間里旋轉的特殊酉群;這裡, 值在0與之間。這些角也稱為歐拉角。
在剛體的問題上,xyz坐標系是全局坐標系, XYZ 坐標系是局部坐標系。全局坐標系是不動的;而局部坐標系牢嵌於剛體內。關於動能的演算,通常用局部坐標系比較簡易;因為,慣性張量不隨時間而改變。如果將慣性張量(有九個分量,其中六個是獨立的)對角線化,那麼,會得到一組主軸,以及一個轉動慣量(只有三個分量)。
在量子力學里,詳盡的描述SO(3)的形式,對於精準的演算,是非常重要的,並且幾乎所有研究都採用歐拉角為工具。在早期的量子力學研究,對於抽象群理論方法(稱為Gruppenpest),物理學家與化學家仍舊持有極尖銳的反對態度的時候;對歐拉角的信賴,在基本理論研究來說,是必要的。
歐拉角的哈爾測度有一個簡單的形式,通常在前面添上歸一化因子。
單位四元數,又稱歐拉參數,提供另外一種方法來表述三維旋轉。這與特殊酉群的描述是等價的。四元數方法用在大多數的演算會比較快捷,概念上比較容易理解,並能避免一些技術上的問題,如萬向節鎖(gimbal lock) 現象。因為這些原因,許多高速度三維圖形程式製作都使用四元數。
