防撞雷達
防撞雷達
防撞雷達系統是由數個感應器與一組藏有微電腦控制器及蜂鳴器所組成。其原理是利用超聲波信號,經由微電腦的指揮與控制,再從感應器的發射與接受信號過程,比對信號折返時間而計算出被測物的距離,然後由報警器發出不同的報警聲。
規格
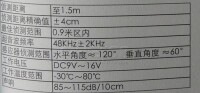
後部探測區域必須涵蓋的範圍:車寬每側加20cm
後部探測區域可能涵蓋的範圍:車寬每側加30cm
當障礙物接近某個側部區域時,從車輛後方40cm開始可能給予指示,
本系統將在掛入倒檔后1秒鐘內被激活,有“嗶嘩”兩聲開機提示音以示系統正常工作。
本系統由12V(指電源正極)電源系統供電,如切斷倒車燈電源供電,本系統將進入關閉狀態。
當探測到的距離在側部<25cm和/或在中部<40cm時,聲響信號將變為持續音以避免碰撞保險杠。
本系統有3種不同的狀態:
激活狀態:在發動機運行或點火開關置於運行檔時掛入倒檔,系統進入激活狀態,併發送處於服務狀態的信號。
關閉狀態:退出倒檔或點火開關脫離運行檔后(無論是否掛在倒檔),系統變為關閉狀態。
錯誤狀態:系統被激活但卻不發送聲響信號,則系統處於錯誤狀態。錯誤消除后,需要再次掛入倒檔,系統才會重新進入激活狀態。
在發動機運轉時掛入倒檔並一直處於倒檔時,系統進入激活狀態。
在這種狀態下,不論車輛接近還是離開障礙物,或是保持不動,系統均會向駕駛員提示。
在一輛裝備了相同系統或其它供應商的類似系統(系統已激活)的車輛附近,本系統可能會受到干擾,但不影響正常工作。
障礙物的移動
若障礙物與車輛的相對移動速度小於1m/s本系統應正常工作。
倒車雷達僅是駕駛的輔助器材,一切安全仍由駕駛者自行負責。
倒車速度較快時,倒車雷達系統感測準確性有所降低,建議低速:3公里/小時。
當警報聲為長響時,請立即停車,因為此時已有障礙物進入40厘米區內。
感應器精密度高,私自開啟內部將很難恢復正常。
“反應不及”常常是發生車禍的主因之一,目前市面上雖然有賣會自動煞車的“防撞雷達”,但是一套動輒2、30萬新台幣,一般民眾可能配備不起。台大最新研發一套“防撞雷達”,成本不到百分之一,最遠可以測到150米外的物體,不管是車還是人或是動物,都能夠偵測得到。
開車上路最怕的就是反應不及,嚴重的甚至發生車禍。目前市面上會自動踩煞車的防撞雷達,起碼2、30萬,未來可能花不到百分之一的價錢,就能買到這套由台大最新研究的“毫米波車用防撞雷達”,成本只要2至3千,每輛車都能用。
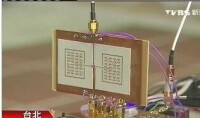
“最前端關鍵的原件,製作的晶元是在這個地方,非常小,只有半個米粒大小的晶元,後面這些原件可以整合成一塊,大概一個手機大小的模塊!”
這套防撞雷達,最遠可以測到前方150米,就算下雨天也不用怕會影響視角,位置就設在車頭保險桿上60至70厘米處,裡頭有兩片天線,其中一片是發訊號,發現前方有車子的話,電磁波就會折返,由另一片天線接收,沒有保持安全距離,或是突然有車插隊,防撞系統就會提出警告,自動踩煞車。
“如果在比較近的距離之內,有行人通過,或是動物通過,能不能做防撞測試,當然是可以!”
只要是有機物體,不會被電磁波穿透的塑料類或是紙張,這套系統都可以測車前的物體距離。負責研發的李致毅也說,目前這項發明還在申請專利,如果未來真能成功技轉量產,成本壓低,使用普及,或許就能有效降低車禍發生率。
防撞雷達
許多車電系統大廠都正在開發汽車主動防撞設計,包括美國的Delphi和Visteon、日本的Denso和AISIN、加拿大的Magna、德國的Continential和法國的Valeo等。整車車廠的應用大部分還在測試階段,不過現在包括NISSAN、VOLVO和INFINITI等,都已在新車款配備主動防撞系統,且不僅是在高階車款,平價車種也開始搭載主動防撞系統。
NISSAN日前便在北美市場發表防撞預警概念系統(ForwardCollisionAvoidanceAssistConcept);INFINITI在新世代M系列房車上,也率先導入SafetyShield行車安全整合系統,主要設計也整合智能巡航控制(ICC)、車距控制輔助系統、盲點側撞預防系統、車道偏移預防系統等多項電子輔助裝置。
車體前後方主動防撞系統的技術核心,主要是採用雷達測距防撞偵測系統(Distronic;DTR),用單個雷達模塊提供中、長距離目標檢測,其組件組成還包括DTR雷達感測器、DTR運算裝置、巡航控制、電位差開關、CAN控制網路、收發天線和中頻訊號處理等。
以Delphi的電子掃描雷達模塊為例,其頻率採用是全球通用的76GHz,掃描距離可達60~174公尺,角度涵蓋90度~20度,可同時掃描多達64個目標。由雷達偵測到車輛前方速度變慢或是靜止的車輛或物體,系統便會計算距離與駕駛人的反應時間,推估是否有撞擊的可能性。同時,這樣的雷達掃描技術也一併和自動煞車系統鏈接。NISSAN所推出的防撞預警概念系統,便宣稱能讓時速60公里以下的車輛完全地達到自動煞車的效能。
再者,車體碰撞預警的雷達掃描技術,也可以和智慧巡航控制或主動巡航控制(ACC)的系統結合,透過雷達偵測前方車輛或物體的固定間距,自動地調整車輛行車速度。當碰撞危機可能發生時,藉由碰撞預警和緩解系統,輔助煞車和煞車制動器便能啟動作用。
這樣的雷達掃描技術,主要可分為遠紅外/近紅外光、超音波和毫米波(MillimeterWave)等。遠紅外/近紅外光激光雷達運用光速計算,偵測距離小於150公尺,角度範圍約在10度以內。運用都普勒原理的超音波雷達,偵測距離小於4公尺,角度範圍可達60度。但這兩種技術都有自動安全應用上無法克服的缺陷。
另一方面,超音波雷達的優點在於對雨、雪、霧的穿透能力強,衰減小,且測距原理簡單、製作方便、成本低。但缺點在於超音波的傳播速度相對電磁波來說慢了許多,當汽車在高速公路以百公里行駛時,超音波的傳播速度會比電磁波慢,超音波測距無法跟上車距變化,誤差大。且超音波雷達方向性差,發散角大,使發散能量大大降低,導致分辨力下降,易將近車道的車輛或路邊的物體誤為測量目標。這樣的缺點反成為優勢,因此超音波雷達多數被應用在汽車尾部的倒車雷達上。
至於以毫米波雷達為基礎的自動防撞設計,多採用76~77GHz頻段,因為毫米波雷達波長短、指向性高,沿直線傳播且穿透能力強,不但可以探測目標的距離,還可測出相對速度和方位。在較惡劣的氣候環境和灰塵較多的條件下,毫米波雷達都能夠正常運作,因此在極為講究安全的汽車自動防撞設計里獲得青睞。不過毫米波雷達自動防撞需要防止電磁波干擾,存在其它通訊設施電磁波干擾以及雷達裝間的相互影響,容易發生誤動作,這是美中不足之處。
整體來看,由於生產自動防撞雷達模塊的主要材料GaAs和SiGe價格居高不下,這還是汽車自動防撞雷達僅能應用在少數高檔轎車的最大瓶頸,且目前車用雷達使用頻段尚未統一,車電大廠各行其是,這些課題還要一一克服,也才能落實讓自動防撞雷達設計保護駕駛人安全的用心。
由於物體的位置、角度、大小及反射因材質的關係,反射的信號可能不被接收到。另外,複雜環境所反射回來的信號也可能有所誤。請看以下例子:
駕駛者無法從雷達眼得到任何警告---甚至無法從側鏡中看到(橫拉的細小物體,如細鐵絲、細繩等)。
B及C遲早會被測到,但A就永遠測不到。
首先感測到A,但當車輛倒退到底時,卻顯現B的距離。
可能錯誤判斷最近距離,顯示B,而不是顯示A的距離。但只有當最近距離的物體進入盲區時才會發生。
玻璃牆或其它任何光滑的表面幾乎與車輛垂直時,可能感測不到。
接近光滑的斜坡時,可能感測不到。
可能感測不到小而光滑的圓柱桿。