磁致伸縮位移感測器
多用於木材加工定位控制的設備
磁致伸縮位移感測器,通過內部非接觸式的測控技術精確地檢測活動磁環的絕對位置來測量被檢測產品的實際位移值;該感測器的高精度和高可靠性已被廣泛應用於成千上萬的實際案例中。
由於作為確定位置的活動磁環和敏感元件並無直接接觸,因此感測器可應用在極惡劣的工業環境中,不易受油漬、溶液、塵埃或其它污染的影響。此外,感測器採用了高科技材料和先進的電子處理技術,因而它能應用在高溫、高壓和高振蕩的環境中。感測器輸出信號為絕對位移值,即使電源中斷、重接,數據也不會丟失,更無須重新歸零。由於敏感元件是非接觸的,就算不斷重複檢測,也不會對感測器造成任何磨損,可以大大地提高檢測的可靠性和使用壽命。
磁致伸縮線性位移/液位感測器的檢測機理基於感測器核心檢測元件磁致伸縮波導絲與游標磁環間的魏德曼效應。 測量時,電子倉中的激勵模塊在敏磁致伸縮線性位移/液位感測器的檢測機理基於感測器核心檢測元件—磁致伸縮波導絲與游標磁環間的魏德曼效應。
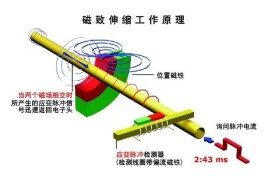
測量時,電子倉中的激勵模塊在敏感檢測元件(磁致伸縮波導絲)兩端施加一查詢脈衝,該脈衝以光速在波導絲周圍形成周向安培環形磁場,該環形磁場與游標磁環的偏置永磁磁場發生耦合作用時,會在波導絲的表面形成魏德曼效應扭轉應力波,扭轉波以聲速由產生點向波導絲的兩端傳播,傳向末端的扭轉波被阻尼器件吸收,傳向激勵端的信號則被檢波裝置接收,電子倉中的控制模塊計算出查詢脈衝與接收信號間的時間差,再乘以扭轉應力波在波導材料中的傳播速度(約),即可計算出扭轉波發生位置與測量基準點間的距離,也即游標磁環在該瞬時相對於測量基準點間的絕對距離,從而實現對游標磁環位置的實時精確測量。
磁致伸縮位移(液位)感測器,是利用磁致伸縮原理、通過兩個不同磁場相交產生一個應變脈衝信號來準確地測量位置的。測量元件是一根波導管,波導管內的敏感元件由特殊的磁致伸縮材料製成的。測量過程是由感測器的電子室內產生電流脈衝,該電流脈衝在波導管內傳輸,從而在波導管外產生一個圓周磁場,當該磁場和套在波導管上作為位置變化的活動磁環產生的磁場相交時,由於磁致伸縮的作用,波導管內會產生一個應變機械波脈衝信號,這個應變機械波脈衝信號以固定的聲音速度傳輸,並很快被電子室所檢測到。
由於這個應變機械波脈衝信號在波導管內的傳輸時間和活動磁環與電子室之間的距離成正比,通過測量時間,就可以高度精確地確定這個距離。由於輸出信號是一個真正的絕對值,而不是比例的或放大處理的信號,所以不存在信號漂移或變值的情況,更無需定期重標。
1.測桿結構:剛性測桿結構、外置一體式結構;
3.測桿耐壓:(位移);
4.液位:由所選浮子承壓決定
5.電子倉外殼:鋁合金
6.安裝介面:螺紋連接、固定座
8.防護等級:IP65(可根據要求定製IP67或IP68)
1.內部非接觸式測量;
2.性能價格比高;
3.多種輸出方式可供選擇;
4.防浪涌、防射頻干擾;
5.安裝方便;
6.高精度、高穩定性、高可靠性;
7.使用壽命長;
8.具有輸入電源反向極性保護功能;
9.結構精巧、環境適應性強;
10.隔離防爆型(可選);
11.不需定期標定和維護。
1.伺服液壓油缸活塞位置反饋或預置;
2.研磨機械位置反饋或預置;
3.木材加工定位控制;
5.紙張和塑料薄膜成型;
6.擠注模具機械;
7.吹塑;
8.工程機械;
9.金屬成型/剪切衝壓;
10.其它機械定位和位移檢測;
11.水壩閘門;
12.鑄鍛機床位移控制;
13.注塑機模板定位與監測;
15.玻璃壓制;
16.塑料機械改造;
17.氣動缸;
18.鋼材滾壓;
19.食品加工;
20.港口機械;
21.船舶舵機伺服系統;
22.伺服汽缸活塞位置反饋或預置。
磁致伸縮位移感測器是根據磁致伸縮原理製造的高精度、長行程絕對位置測量的位移感測器。它採用內部非接觸的測量方式,由於測量用的活動磁環和感測器自身並無直接接觸,不至於被摩擦、磨損,因而其使用壽命長、環境適應能力強,可靠性高,安全性好,便於系統自動化工作,即使在惡劣的工業環境下(如容易受油潰、塵埃或其他的污染場合),也能正常工作。此外,它還能承受高溫、高壓和強振動,現已被廣泛應用於機械位移的測量、控制中。它的行程可達3米或更長,標稱精度為,行程1米以上感測器精度可達,重複性可達,因此它在石油化工,航空航天、電力、水利等行業得到廣泛的應用。
1.測量對象:位置、速度(絕對速度),可測量個位置
2.測量範圍:
3.零點可調範圍:
4.輸出方式:
電流:,最大負載電阻
電壓:
5.精度:
解析度:採用轉換,
非線性:
重複精度:
6.遲滯:
7.溫度係數:
8.更新時間測量範圍:
9.供電電源:
10.工作電流:
11.工作溫度:
12.儲存溫度:
13.零點/跨度調整:有效行程(最小範圍)
14.解析度
15.線性度:
16.重複精度:
17.滯后:
18.刷新周期:
19.紋波:行程長度
20.速度測量:滿量程
21.範圍:
22.誤差:
23.解析度:
24.刷新周期:(ms)見位置測量
25.溫度係數:
大家都知道物質有熱脹冷縮。除了加熱外,磁場和電場也會導致物體尺寸的伸長和縮短。鐵磁性物質在外磁場的作用下,其尺寸伸長(或縮短),去掉外磁場后,其又恢復原來的長度,這種現象稱為磁致伸縮現象(或效應)。此現象的機理是:鐵磁或亞鐵磁材料在居里點以下發生自發磁化,形成磁疇。在每個磁疇內。晶格都沿磁化強度方向發生形變。當施加外磁場時,材料內部隨即取向的磁疇發生旋轉,是各磁疇的磁化方向趨於一致,物體對外顯示的宏觀效應即沿磁場方向伸長或縮短。
磁致伸縮材料主要有三大類:即:磁致伸縮的金屬與合金和鐵氧體磁致伸縮材料。這兩種稱為傳統磁致伸縮材料。它們並沒有得到廣泛的應用:後來人們發現了電致伸縮材料,其電致伸縮係數比金屬與合金的大約,它很快得到廣泛的應用;第三大類是發展的稀土金屬間化合物磁致伸縮材料,稱為稀土超磁致伸縮材料。它是可提高一個國家競爭力的材料,是21世紀戰略性功能材料。
磁致伸縮位移感測器適用於高溫、高壓和強振蕩等極其惡劣的工況,其絕對式輸出很好地解決了斷電歸零問題,由於敏感元件都是非接觸式、無磨損運行,平均無故障時間長達23年。
來自業內專家的創新性建議
由於眾多知名專家的加入,團隊在產品研發領域始終保持領先地位。這些業界精英代表客戶從事各種科研和行業活動,從而更深入地了解客戶所面臨的挑戰並能提出相應的創新解決方案。
1系列
2系列
可編程和內置診斷功能的感測器系列。適合一般的機械自動化應用,輸出模式有:模擬的電壓與電流、數字的Start/Stop和PWM脈衝。
3-系列
3-系列感測器,為用戶提供了非常實用的絕對值位移反饋信號,性價比極高。標準輸出方式有:模擬的電壓與電流以及數字的Start/Stop脈衝等。
隨著國內風力發電機組的製造水平的不斷提高,液壓變槳系統憑藉其在性能、環境適應能力、維護成本等方面的優勢,必將得以廣泛應用。機械盤式剎車鎖緊銷方面,磁致伸縮線性位移感測器的應用顯著提高了鎖緊銷動作的可靠性,進而提高了整機運行的安全性。
首先是感測器的供電情況,如果位移感測器供電電源容量不足,就會造成以下的情況:熔膠的運動會使合模電子尺的顯示變換,有波動,或者合模的運動會使射膠電子尺的顯示波動,造成測量誤差變大。如果電磁閥的驅動電源與直線位移感測器供電電源共用的時候,更容易出現這種情況。
其二是調頻干擾和靜電干擾的問題,調頻干擾和靜電干擾都有可能讓直線位移感測器的電子尺的顯示數字跳動的。所以,電子尺的信號線與設備的強電線路要分開線槽。電子尺必須強制性地接地。信號線需要使用屏蔽線,而且電箱的一段應該跟屏蔽線接地的。如果有高頻干擾的時候,通常使用萬用表的電壓測量就會顯示正常,但是顯示數字就是會跳動不停的;而出現靜電干擾時,出現的情況也是跟高頻干擾一樣的。要證明看是否是靜電干擾時,只需用一段電源線把電子尺的封蓋螺絲跟機器上的某一些的金屬短接起來就可以了,只要一短接起來,靜電干擾就會馬上消除掉。但是如果要消除掉高頻干擾就很難用上面的方法了,可以試下暫停高頻干擾源,看顯示結果會不會更好,以此來判斷是不是高頻干擾的問題。
其三如果出現顯示數據有規律地跳動,或者是沒有顯示數據,技術人員就需要檢查連接線絕緣是不是出現破損的現象,並且判斷是否跟機器的外殼很有規律地接觸而導致的對地短路。
其四位移感測器的對中性、平行度以及角度的具體要求問題,安裝直線位移感測器的對中性需要很好,但是平行度可以允許有的誤差,角度可以允許有的誤差。但是如果平行度誤差和角度誤差都是偏大的話,這樣會出現顯示數字跳動的情況。那麼出現這樣的情況的時候,必須要對平行度和角度進行調整了。
最後就是位移感測器接線問題,直線位移感測器的三條線是不可以接錯的,電源線和輸出線是不可以調換的。如果上面的線接錯的話,就會出現線性誤差很大的情況,要控制的話是很難的,控制的精度也會變得很差,而顯示很容易出現跳動的現象等等。以上五點情況都是位移感測器安裝使用時需要特別注意的。
電壓和電流輸出的負載是不一樣的,電壓的負載時要求電阻越大越好,一般不要小於,太小時就相當於短路了,會損壞產品;電流的負載是要求電阻越小越好,一般不要大於,太大時就相當於開路了,沒有電流流通。所以電流輸出的負載和電壓輸出的負載限制是不一樣的而且一定要注意:電壓輸出時,負載不能短路,否則會使負荷太大,燒毀電路;而電流輸出時,負載不能開路,否則會使負載增加而燒毀電路。這兩點一定要清楚。至於電壓輸出和電流輸出,到了機器上最終的用途還是一樣的,電壓輸出直接用電壓信號,電流信號流過電阻,在電阻上有電壓,也是取用電壓信號。
安裝接線:磁致尺對電壓的波動可以接受,可以使用的電源,當然穩定的供電電源還是對產品的精度更有好處,但對靜電還是要採取一些措施。除線路板內部採取了很多措施外,傳輸線有屏蔽線(雙重屏蔽:編織網和錫包層,可以抗高、低頻干擾),還有接地端子,必須保證可靠接地(抗靜電干擾)。上述幾項措施缺一不可。
一般情況下,客戶的產品替換下來,可能了解原來的產品是電流型還是電壓型,但訂了貨卻不知道如何安裝。如:原來的電壓型是五線甚至七線的,而我們的四線的(電源+、-、信號線、地線)一般棕色或紅色是直流電源正極,藍色或黑色是負極,可以用萬用表的電壓檔位測可能的正、負極之間的電壓值,如果沒有把握,就可以在可能的正、負極之間接一個的電阻,再測量電阻之間的電壓值,確認正負極性后,用正極分別去短路剩下的幾根線,同時看電腦顯示是否出現穩定的最大值,如果是,再用負極去短路剛才驗證的那根線,同時看電腦顯示是否出現穩定的最小值,如果是,就是信號線了。這就確定了+、-、和信號線了。如果信號線非常難以確定,上述方法行不通,可能就是該感測器的電源與電腦的電源沒有共地,沒有共地,就沒有一個基準值,該感測器的電源相對電腦電源就是浮動電壓值。因此,必須將該感測器的電源負極與電腦的電源負極短接。上述問題自然解決。這很容易出現在維修設備的過程中。其它的幾根線不要管,用電工膠綁起即可。
如果是電流型輸出的感測器,就不能這樣實驗了。因為,電流型輸出負載不能開路,否則,容易過載損壞感測器。對於,三線制輸出的感測器,應該先在感測器信號線與負極之間先接一個電阻短路,以免誤操作時過載。在預先弄清楚正負極的情況下,接好感測器的正負極接線,再將信號線分別與其餘幾根線短路,看有無穩定的顯示。如有,可確定信號線的接線。然後在停電的情況下,取下原來短接的那個電阻,再接好線,然後才能送電。注意信號線一定不能開路。
對於傳輸距離較長,但是電腦有需要電壓輸出信號,可以選用電流輸出信號進行傳輸,到了電腦邊再將電流信號轉換成電壓信號,方法很簡單,只需要在輸出與電源負極之間接入一個標準的高品質電阻就可以。
由於磁致伸縮位移感測器的原理,從機械上講,因為是無接觸、無磨損的,所以出現故障的機會不多,除非機械損壞,磁環脫落,這從外觀就容易判斷。如果是裝在油缸內部,磁環突然脫落,顯示數值將沒有變化。如果是停機好久才脫落,開機上電時好像在靠近電子倉端出現了一個磁環,即:正邏輯尺將會出現最小顯示數值,負邏輯尺會出現最大顯示數值。如果是可拆卸電子倉式的,可以簡單地將電子倉取下,帶電用一磁環測試即可。從電氣上講,是有出現問題的可能。公司為了避免電氣出現問題,作了大量工作,如:選擇功耗很小的元器件使功率消耗小,如電流消耗只有,實際功率只有不到,這樣就不會使元器件發熱、老化和損壞;還有公司,公司通過先進的工藝客服了其它各種問題,產品經嚴酷的環境測試和機械測試,均符合要求。應該在一般使用條件和環境中不會出現問題。可能會出現的問題,諸如:數據傳輸不會運行,軟體包未安裝成功、接線錯誤、信號大小方向不對、靜電干擾未有效接地、電流型輸出不會接線、或原來是了兩線的而我們的產品是三線制的。
磁致伸縮位移感測是利用磁致伸縮效應研製的感測器。該感測器可以實現非接觸、絕對式測量,具有高精度、大量程的特點,特別是由於磁鐵和感測器並無直接接觸,因此感測器可應用在惡劣的工業環境,如易燃、易爆、易揮發、有腐蝕的場合。此外,感測器能承受高溫高壓和高振蕩的環境。感測器輸出信號為絕對數值,所以即使電源中斷重接也不會對數據收構成問題,更無尖重新調整零位。由於感測器組件都是非接觸的,所以即使測量過程理不斷重複的,也不會對感測器造成任何磨損。
研製中涉及的關鍵技術有:
(1)大電流周期激發電路的設計;
(2)微弱信號的檢測、信號的濾波、放大、電壓比較、峰值檢驗波、電壓限幅等一系列電路的設計;
(3)基於單片機的高精度時間量測量。技術要求:測量範圍,精度。測量範圍不是很大,主要是受到實驗所用波導鋼絲本身長度的限制。
1.位移感測器的原理
磁致旋轉波位移感測器,如圖1所示。除位置磁鐵外,所有其他元器件都安裝在感測器殼體內,
組成感測器的主體。位置磁鐵通常裝在一個運動部件A上,
而感測器主體則裝在一個固定的部件B上。
感測器工作時,電子信號和處理系統發給磁致波導鋼絲間隔為T的激勵脈衝電流ie該脈衝電流將產生一個圍繞波導鋼絲的旋轉磁場。位置磁鐵也產生一個固定的磁場。根據Widemanm效應,金屬隨其瞬間變形產生波導扭曲,使波導鋼絲產生磁致彈性伸縮,即形成一個磁致旋轉波。磁致旋轉波的傳播速度為
式中:G為波導管的剪切彈性模量;ρ為波導管密度。
由於G和ρ均為恆定(對於一定的波導管來說)的,所以傳播速度也恆定。經過計算該旋轉波沿著波導鋼絲以的速度向兩邊傳播。當它傳到波導鋼絲一端的波檢測器時被轉換成電信號ua·通過測量磁致旋轉波從位置磁鐵傳到波檢測器的時間tL就能確定位置磁鐵和波檢測器之間的距離。這樣,當部件A和B產生相對運動,通過磁致旋轉波位移感測器就可以確定部件A的位置和速度。
在波導鋼絲的另一端,磁致旋轉波將通過減波元件被大大削弱,以避免反射的波形對測量精度造成影響。波反射器是用於改善電信號ua的波形和加強電信號的大小。
2.位移感測器的結構
(1)產生一個周期激勵脈衝電流,該脈衝輸入波導鋼絲,以便圍繞波導鋼絲形成一個周期脈衝磁場。該脈衝的周期和寬度應通過微處理器編程來調節。為了獲得較強的脈衝磁場,激勵脈衝應具有足夠的能量,即足夠的電流。
3.感測器性能指標測試及結果
為了給感測器系統進行定標,搭建了測試平台。測試平台由感測器主體、位置磁鐵、螺旋測微器、印製電路板、LCD、FDPS-50BA型電源(輸人組成。
在搭建的平台上面對感測器的性能進行測量,主要包括感測器的線性度,遲滯和重複性。
(1)感測器線性度
測量:在感測器測量整個範圍內,旋動螺旋測微器分別每隔記一組數據,位置磁鐵相應移動,連續取測量數據20組,如圖3。
線性度的指標公式為
式中:為非線性誤差(線性度);為最大非線性絕對誤差;為輸出滿量程。
從圖3可知,採用最小二乘法擬合直線的斜率為0.992,直線方程為,因此在範圍內的線性度為。
(2)感測器遲滯
將螺旋測微器在感測器的正反兩個方向量程內來回移動,測量範圍為,測到的數據如圖4。其中有正向測量和反向測量數值(每隔測量1次),以及正反方向測量的差值。
由遲滯誤差公式
式中為正反行程輸出最大差值。
從圖4知,,而。
(3)感測器重複性
圖5是感測器在正行程和反行程測量各測2次的數據,其中還計算了重複性偏差。根據式(2)可計算出滿量程的重複性誤差指標。
①感測器的分辨力
經過測試系統測試,移動螺旋測微器,感測器LCD顯示值改變。
②穩定性
在測試時,將感測器設定在一固定點,然後分別在讀取數據1次,測得值分別為。穩定性誤差為。感測器通、斷電幾次后在此位置讀數,仍舊為31.62,驗證了磁致伸縮感測器不受掉電影響。
溫度穩定性是指感測器在外界溫度變化下輸出量發生的變化。測量感測器溫度穩定性時,分別在房間溫度為和室外溫度為測量,讀數變化為,即溫度穩定性誤差為。
③測試系統靈敏度
移動螺旋測微器,測到感測器LCD屏上變化,此測試系統的靈敏度為1.12。
綜上,經過實驗測得感測器的靜態特性,可知感測器的線性度為。磁致伸縮位移感測器的自身精度很高,理論可以達到級,實際分辨力只有。
4.結束語
在搭建的平台上對磁致伸縮位移感測器進行了進一步的誤差分析。誤差主要還是在感測器的一些性能指標上。磁致伸縮感測器的主體部分及位置磁鐵開發與研製,經實驗測試,結果理想,位置磁鐵在感測器不同的位置都有一不同的信號反_映。信號處理電路中占空比可調的脈衝激發控制信號電路部分設計,經實際的電路調試結果理想。脈衝激發電路用不同方案設計並綜合考慮到實際電路實現,在ORCAD上模擬效果理想。進一步提高精度有幾種方案。比如用DSP晶元來測量位移。的TMS320LF2407型DSP晶元,時鐘周期,DSP無需分頻,則位移解析度為也可以用複雜可編程邏輯器件(CPLD),它具有使用靈活、可靠性高、功能強大的優點,CPLD可實現系統編程,而且能重複多次,使用CPLD器件進行開發,不僅可以提高系統的集成化程度、可靠性和可擴充性,而且還可大大縮短產品的設計周期。磁致伸縮位移感測器技術必將廣泛應用於我國的各項工業領域中。
基本信息
- 中文名
- 磁致伸縮位移感測器
- 應用領域
- 伺服液壓油缸活塞位移檢測
- 產品特點
- 性價比高
- 測桿耐壓
- ≤34MPa
- 測桿材質
- 不鏽鋼304