操縱桿
將運動轉換成電子信息的設備
不同操縱桿技術的差別主要體現在它們所傳送的信息的多少。許多早期遊戲控制台中的最簡單的操縱桿只不過是一個特殊的電子開關。
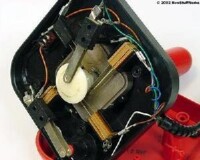
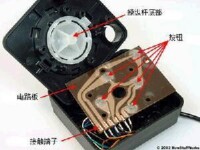
操縱桿的基本原理是將塑料桿的運動轉換成計算機能夠處理的電子信息。這種基本的設計包括一個安放在帶有彈性橡膠外殼的塑料底座上的操縱桿。在底座中操縱桿正下方位置裝有一塊電路板。電路板由一些“印刷線路”組成,並且這些線路連接到幾個接觸觸點。然後,從這些觸點引出普通電線連接到計算機。
印刷線路構成了一個簡單的電路(該電路由一些更小的電路構成)。這些線路僅僅將電流從一個觸點傳送到另一個觸點。當操縱桿處於中間位置時,也就是當您還未將操縱桿推向任何一邊時,除了一個電路之外的所有其他電路均處於斷開狀態。由於每條線路中的導體材料並沒有完全連接,因此電路中沒有電流通過。
每個斷開部分的上方覆蓋著一個帶有小金屬圓片的簡單塑料按鈕。當您朝任一方向移動操縱桿時,操縱桿便會向下擠壓其中的一個按鈕,使導電的金屬圓片接觸到電路板。如此一來,就可以閉合電路,完成兩個線路部分的連接。電路閉合之後,電流就會從計算機(或遊戲控制台)沿著一條線路流過,穿過印刷線路,通過另外一條線路返回計算機(或遊戲控制台)。
每個分壓器由一個捲曲導軌形式的電阻和一個可移動的觸臂組成。計算機電源的電流從輸入端開始,通過捲曲的電阻和觸臂,流回計算機的操縱桿埠。
沿著導軌移動觸臂,可以增大或減小作用於流經此電路的電流的電阻值。如果觸臂位於與分壓器輸入連接端相對的另一端,電流將流經整個長度的電阻,因而電流遇到的電阻最大。如果觸臂靠近輸入端,則分壓器的電阻最小。

操縱桿
改變分壓器的電阻值可以改變接入分壓器的電路中的電流。通過這種方式,分壓器先將操縱桿的物理位移轉換成電信號,再將信號傳遞到計算機上的操縱桿埠。
此電信號完全是模擬信號,是一種包含信息的變化的波形,就像無線電信號一樣。為了利用這種信息,計算機需要將其轉換成數字信息,即精確的數值。

操縱桿
先將電容放電然後再計算電容充電所需的時間,通過這個方式轉換器以此確定分壓器的位置,從而確定操縱桿的位置。測量到的充電速率是計算機可以識別的數值。當計算機需要讀取操縱桿位置時,便會執行此操作。
將分壓器連接到旋轉的部件,可以將這種系統應用到各種控
制系統中。例如,傳統的方向盤的工作原理即是如此,通過方向盤直接轉動分壓器觸臂。一些操縱桿還使用一個對應於Z軸的分壓器,Z軸由操縱桿自身的轉動來帶動。一些操縱桿還帶有一個“大高帽”(操縱桿頂部的一個用拇指操控的微型控制器)。這種小型操縱桿使用了與上一節中介紹的簡易操縱桿相同的開關係統。
傳統的模擬系統總體上可以很好地工作,但確實存在一些限制。在下一節中,我們將探討模擬系統的主要弊端並了解一些最新的解決方案。
操縱桿
在這個系統中,兩個軸連接到兩個開槽輪盤。每個輪盤都位於兩個發光二極體(LED)和兩個光電池之間(為方便起見,圖中僅顯示了一對光電池和發光二極體)。當每個LED發出的光透過一個槽孔時,輪盤另一側的光電池就會產生微弱的電流。當輪盤輕微轉動時將阻擋住光線,此時光電池不會產生電流(或者產生的電流很小)。
軸旋轉時將帶動輪盤轉動,移動的槽孔會反覆阻擋射向光電池的光束。這使得光電池產生高速電流脈衝。根據光電池產生的脈衝數量,處理器就能知道操縱桿移動的距離。通過比較來自監測同一個輪盤的兩個光電池的脈衝圖,處理器可以計算出操縱桿移動的軌跡。許多計算機滑鼠也採用了同樣的基本系統。

英國PML操縱桿
這種設計以類似速記的方式傳送操縱桿的運動,它以絕對值而非細微變化的形式來處理運動。換句話說,它並不能區分向前輕推操作桿的動作和將操作桿向前一直推到頭的動作,對它來說兩者傳送的都僅僅是一個表示向前進的數值。
對某些遊戲而言,這種思路是好的,甚至是無可挑剔的。例如,對Pac Man或Tetris而言,這種設計已經很完美了。但對於其他遊戲,如模擬飛行而言,這種設計存在相當大的局限性。在下一節中,我們將了解到能夠檢測到細微位移的傳統模擬操縱桿設計。
為了向計算機傳遞完整的運動過程,操縱桿需要測量其在兩個軸上的位置:X軸(從左到右)和Y軸(自上到下)。與在基礎幾何學中一樣,X-Y坐標系精確地標明了操縱桿所在的位置。
操縱桿
操縱桿控制系統僅需監視每一個軸的位置就能確定操縱桿的位置。傳統的模擬操縱桿通過兩個分壓器或可變電阻來達到上述目的。下圖顯示了一個典型的布局。
作用力反饋操縱桿(也稱觸覺反饋操縱桿)的基本思路是將操縱桿的運動與屏幕上的動作聯繫起來。例如,您在戰鬥遊戲中用機關槍掃射時,操縱桿會在您的手中震動。或者,如果您的飛機在飛行遊戲中墜毀了,操縱桿會猛然向後推。

與操縱桿相連的X方向軸和Y方向軸均與皮帶輪接合在一起。每根軸的皮帶的另一端與一個電動機的轉軸接合在一起。在這個機構中,旋轉電動機軸將移動皮帶,從而帶動方向軸轉動;轉動方向軸也將移動皮帶,從而帶動電動機轉軸旋轉。皮帶的作用是傳遞和放大從電動機到方向軸的作用力。
板載處理器和操縱桿的物理運動產生的電信號都會使電動機軸旋轉。這樣,甚至在電動機移動操縱桿的同時,您仍然可以移動操縱桿。
在電動機的另一端,其轉軸與操縱桿的位置感測器(如分壓器或者光學感測器)相連。只要操縱桿發生移動,無論這種移動是由電動機引起的還是遊戲者引起的,感測器都可以檢測出操縱桿的位置。
操縱桿有一個內置的ROM晶元用來存儲各種電動機動作序列。例如,其中可能會有一個機關槍動作序列要求電動機快速地改變方向,或一個火箭筒動作序列要求電動機突然來回移動操縱桿。遊戲軟體請求特定的序列,計算機將請求傳輸到操縱桿的板載處理器上,處理器然後從自身的存儲器中讀取相應的數據。這種方式減輕了計算機的工作負荷,並有利於提高反應速度。
隨著操縱桿技術的不斷發展,製造商會逐漸地將作用力反饋技術提高到一個全新的水平。這對於遊戲發燒友來說無疑是個令人振奮的消息,當然,它也可能會給其他人的生活帶來很大影響。作用力反饋控制器技術將會在工業機械、輪椅和其他殘疾人設備,甚至是醫療護理領域帶來重大變革。相關研究人員也在不斷開發作用力反饋控制器,以便人們在網上衝浪的同時也能感受到來自網際網路的震撼。
作用力反饋技術可能的應用領域是無限的!將來,操縱桿將會像現在的計算機鍵盤一樣無處不在。
移動裝置 工業控制 遙控和無線電控制 雷達和導航系統 機器人和操縱器 測量系統
重型可移動機械 醫療器械 閉路電視攝相機控制系統 船舶操舵系統 娛樂設施控制台
演播室或舞廳燈光設備 演播室攝像機升降平台
給出的是開關信號。其特點是可通過的大電流,設計緊湊,外形輕巧,響應迅速,定心平滑,壽命長,可靠性高,易於安裝。
典型應用:工業控制 遠程無線電控制 雷達&導航系統 機器人技術 測量系統 重型&移動機械
閉路電視控制系統 可移動設備 演播室舞廳燈光設備 軍用設備
給出的也是連續的模擬信號。其核心是操縱桿上的搖桿帶動底下3個軸上的高精度可調電位器滑動,從而輸出對應方向上的位置信號.
是電感式操縱桿在特殊場合的升級應用,主要應用於重型,手動機械.
重型機械 草木修剪機械 農業機械 懸浮車輛 修路設備 叉車 剪式起重機械 觀測台

基本信息
- 中文名
- 操縱桿
- 運用領域
- F-15噴氣式戰鬥機等
- 功能
- 將塑料桿的運動轉換成計算機能夠處理的電子信息的物理設備
- 原理
- 塑料桿的運動轉換電子信息
- 內容
- 詳見正文