半球諧振陀螺
高精度陀螺儀
半球諧振陀螺儀(Hemispherical Resonator Gyro,簡稱HRG) 是哥式振動陀螺儀中的一種具有慣導級性能的高精度陀螺儀,隨機漂移可達到10º/hr量級,壽命高達15年。 HRG由激勵電極、檢測電極和半球諧振子構成,半球諧振子是HRG的核心部件,其性能決定了HRG的性能。諧振子的性能主要由品質因子(Q值)和n=2諧振頻率分裂值(△fn=2)決定。目前精密機械加工的HRG品質因子高達26E6,HRG主要由熔融石英製備而成。美國是第一個研製HRG的國家,目前其HRG性能最佳,體現在哈勃望遠鏡的HRG模塊。俄羅斯、法國、英國、日本、中華台北等先後研究HRG,俄羅斯的理論研究比較成熟(如我國哈工大翻譯工作者譯《固體波動陀螺》),目前法國Sagem公司研製的HRG隨機漂移優於0.01º/hr 。我國HRG的研製起步較晚。目前美國正在大力研製基於MEMS技術的半球陀螺儀(µHRG)。MEMS技術有望實現半球陀螺儀的批量生產,這將大大降低成本,縮小體積。希望我國抓住機遇,µHRG的研製需要眾多科研工作者的奉獻。
半球諧振陀螺儀是一種高精度、高可靠和長壽命的新型固態陀螺儀,它是利用半球殼唇緣的徑向振動駐波進動效應來感測基座旋轉的一種哥式振動陀螺。它具有很高的測量精度、超強的穩定性和可靠性、良好的抗衝擊振動性及溫度性能,還特別具有獨特的關機抗輻射能力。特別是預期壽命高達15年,是衛星或空間飛行器慣性測量單元、姿態穩定控制的關鍵部件,在空間應用領域具有獨特的優勢和廣闊的前景。
陀螺性能劃分如下表:
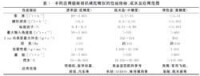
不同應用級別陀螺儀
陀螺性能等級
HRG因具有慣導級的性能而受到廣泛的關注。其具有以下優點:
第一,沒有機械轉子。HRG是靠半球諧振子唇沿高頻振動產生的哥氏效應來敏感角運動的,也就沒有了由於機械摩擦而引起的陀螺儀漂移,並具有較強的抗衝擊能力。由於諧振子振動的慣性,HRG斷電15分鐘仍可以完成角速率的測量。
第二,長壽命。如果HRG的內部密閉性良好,則HRG能夠連續工作15年以上而能夠滿足所要求的性能,美國Northrop Grumman 公司開發的型號為H130P半球陀螺儀在89顆衛星上的91個系統,工作時間12百萬小時100%的任務成功率。因此HRG被公認為目前壽命最長的陀螺儀,並能夠滿足長壽命航天器的需求。
第三,高精度。當HRG作為角速率感測器時,其隨機漂移在10 º/hr量級,而作為積分陀螺時,其隨機漂移可達10 º/hr量級,哈勃望遠鏡里的HRG模塊性能達到:Bias Stability為0.00008º/hr;ARW為0.000010º/Öhr, AWN為 0.000150 arc-sec/ÖHz。因此HRG是非常有前景的慣性敏感器件。
另外HRG還具有體積小,低雜訊,低功耗,高穩 定性,高解析度,高可靠性,對加速度不敏感,抗核輻射等優點。基於以上HRG的優點,它將在飛船與衛星的穩定性控制、航天器導航、石油鑽孔勘探等領域有著廣闊的應用前景。
目前美國已經將HRG 成功的應用在空間飛行器導航、戰術導彈導航、通訊衛星姿控系統、精確指向及深空探測任務中,達到了100%的成功率。
HRG 在空間領域應用的第一個任務是近地小行星(NEAR)的登陸,其導航系統應用的陀螺儀是HRG130Y。飛行器於1996 年發射升空,1997 年飛過253Mathilde 小行星,在飛過地球加速後於2000 年進入繞“Eros”小行星的軌道。NEAR 在完成了科研任務之後於2001 年2 月12 日成功的軟著陸在“Eros”小行星上。
HRG 的第二次成功應用是在SATCOM 商業衛星上的應用,然後是在太空觀測器CASSINI 號中的應用。 1997 年10 月15 日帶有觀測土衛六(泰坦)任務的太空觀測器CASSINI 號發射升空。在飛躍金星(兩次),地球與木星之後,CASSINI 號於2004 年7 月1 日成功進入土星軌道,12 月5 日Huygens探測器與CASSINI 號分離並進入觀測泰坦的軌道,於2008 年6 月30 日成功完成了觀測任務。
2004 年8 月3 日,NASA 實施水星探測任務的飛行器發射升空。慣組系統採用的是由HRG130P 組成的SSIRU 系統,任務預計飛行器於2011 年3 月8 日進入預定軌道。這次任務是SSIRU 系統第一次向世人展示其優越的性能。由HRG130P 組成的SSIRU 系統第二次應用是撞擊Tempel 一號彗星。2005 年1 月12 日,執行任務的飛行器發射升空,7 月4 日完成撞擊任務,如圖所示。這次撞擊任務中的最後階段是由SSIRU 系統獨立引導撞擊器撞向目標,從而再次展示了SSIRU 系統的卓越性能。
美國已成功減小mHRG半徑至3.5cm,重量113.4g。目前美國正大力研發新一代半球陀螺儀(半徑100um-10mm),基於MEMS技術有望大大降低HRG的製作成本,體積也大大減小。
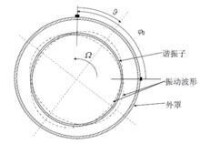
進動角度與旋轉角度的關係
所示。

n=2振動波形的進動
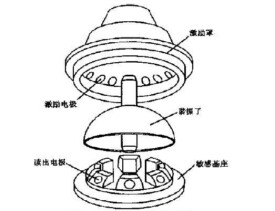
半球陀螺儀的結構如圖所示。
HRG 主要由激勵罩,半球諧振子和含有信號檢測電極(位移拾振感測器)的基座三部分構成。激勵罩位於陀螺儀的頂端,其上有分佈電極。在諧振子加工完畢后要在諧振子表面和激勵罩的分佈電極處進行金屬鍍膜,從而使諧振子與激勵罩分佈電極處形成電容器。根據電容器原理,當對激勵罩上的離散激勵電極或環形激勵電極施加激勵電壓時,電極將對諧振子產生電力作用,進而提供諧振子振動所需要的能量。激勵電極產生的激勵力是實現諧振子振動振幅控制與正交控制的控制力。圖示出了離散激勵電極、信號檢測電極和諧振子自由端的平圖。
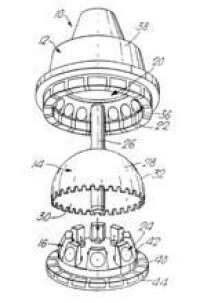
半球陀螺儀的基本結構
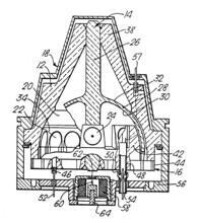
美國Delco 公司製造的HRG
半球諧振子是敏感HRG 輸入角速率的元件,是HRG 的主體部分,其形狀為半球形。半球諧振子通過支撐桿與激勵罩和基座相連,諧振子與支撐桿之間的焊接剛度會直接影響到陀螺儀的精度。當焊接剛度不好時,會使HRG 易受非敏感方向輸入加速度的影響,從而導致HRG 角速率估計誤差。國內研製的半球諧振子的材質是熔融石英晶體,工作時主振型為四波腹的二階振型,其主振型的振動頻率為4kHz~5kHz。波腹是指諧振子徑向振動位移幅值極大值處,波腹相對於諧振子0°位置的夾角稱為波腹方位角。對波腹方位角的檢測是整個HRG控制系統的一個重要環節,同時也決定著陀螺儀角速率估計的精度。陀螺儀精度的高低主要取決於諧振子的加工精度及其材質的均勻性,因此實際當中對諧振子的加工精度要求非常高,這也是其次品率較高和價格昂貴的主要原因。
右圖所示為美國Delco 公司製造的HRG ,此圖給出了HRG 的基本結構。通過吸氣裝置抽出諧振子振動腔體內的空氣,從而保證了腔體內的高度真空。基座上有檢測諧振子振動的四對信號檢測電極,激勵罩上有實現諧振子振動控制的八對離散激勵電極和一個環形激勵電極。
基本信息
- 中文名
- 半球諧振陀螺
- 外文名
- Hemispherical Resonator Gyro
- 原理
- 利用半球殼唇緣的徑向振動駐波進動效應來感測基座旋轉的一種哥式振動陀螺。
- 簡稱
- HRG
- 類型
- 一種哥式諧振陀螺(固態波動陀螺)
- 優點
- 高精度,長壽命