位置伺服系統
位置伺服系統
伺服廣義上是指用來控制被控對象的某種狀態或某個過程,使其輸出量能自動地、連續地、精確地復現或跟蹤輸入量的變化規律。其控制行為的主要特徵表現為輸出“服從”輸入,輸出“跟隨”輸入(為此伺服系統也叫做隨動系統)。
目錄
從狹義上而言,對於被控制量(輸出量)是負載機械空間位置的線位移或角位移,當位置給定量(輸入量)做任意變化時,使其被控制量(輸出量)快速、準確的復現給定量的變化,通常把這類伺服系統稱作位置伺服系統,或叫位置隨動系統。
位置伺服系統應用很廣,例如數控機床中的兩個進給軸(y軸和z軸)的驅動;機器人的關節驅動;x-y記錄儀中筆的平面位置控制;攝、錄像機的磁鼓驅動系統;至於低速速率控制或對瞬時轉速有要求時,也必須採用位置伺服控制。顯然,步進電動機很適合應用於位置控制,但是在高頻響、高精度和低雜訊三方面,直流電動機更具有明顯的優越性。
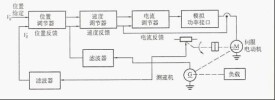
1.經典位置伺服系統的結構
圖1 圖1所示為傳統或經典的位置伺服系統。圖中,旋轉式電位器與電動機同軸,電位器的輸出電壓Vθ與位置成線性關係。位置感測器是系統必不可少的環節。位置調節器將位置給定信號Vg與位置反饋信號Vθ之差值通過調節器進行動態校正,然後送至速率調節器、電流調節器,即經過外環、中環、內環三個閉環調節器的校正再由模擬功率介面驅動伺服電動機,實現位置伺服控制。在這個系統中,位置調節器的作用是使位置給定Vg與Vθ的偏差向最小變化。速度反饋調節器的主要作用是阻尼位置調節過程的超調。電流調節器的作用是減小力矩波動,改善動態響應的快速性,並對最大電流進行限定等。濾波電路的作用是濾除位置或速率感測器輸出信號中的諧波信號。以上各環節的參數的設計和整定應根據具體的負載的性質(力矩和慣量的大小),以便滿足位置伺服精度的要求。
顯然,當負載性質變化時,經典位置伺服系統的硬體參數應該作相應變化,這對於硬體伺服系統是難以進行的。而計算機實現的數字控制系統卻很容易實現。經典系統採用模擬功率驅動介面,功率損耗大,性能難提高,目前只在微小功率、低成本和低精度的場合中被採用。
2. 數字控制伺服系統的結構
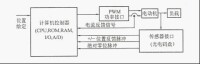
數字控制伺服系統{{分頁}}
最後需要指出的是,受計算機控制器速度的影響,全數字化的位置伺服系統的實現還存在一定的困難。
3.主要介面電路
(1)功率介面
功率介面電路常稱為主迴路。直流伺服系統中大多採用脈寬調製(Pulse Width Modulation)技術,簡稱PWM。小功率PWM功率開關介面均採用全控型功率開關器件,也即自關斷器件,例如:GTR、MOSFET和IGBT。它們的主要性能指標可用反向耐壓、工作電流和開關頻率來表示。三個參數的經驗取值為:反向耐壓應有2倍以上余量,工作電流應有2~4倍左右余量,開關頻率應與實際工作頻率相當。功率驅動電路的基本類型如圖3所示。其中,H橋功率驅動介面適用於有刷電動機,三相橋功率介面適用於無刷伺服電動機。圖中VT1~VT6是大功率晶體管(GTR),也可以採用絕緣柵型的功率晶體管(IGBT),當然也可以採用場效應管(MOSFET)。D1~D6是續流二極體。由於H橋和三相橋功率介面可以對電動機繞組施加
基本信息
- 外文名
- Position servo system