共找到2條詞條名為數控系統的結果 展開
- 數字控制系統
- 梁橋康、王耀南、彭楚武編著書籍
數控系統
數字控制系統
數控系統是數字控制系統的簡稱,英文名稱為(Numerical Control System),根據計算機存儲器中存儲的控制程序,執行部分或全部數值控制功能,並配有介面電路和伺服驅動裝置的專用計算機系統。通過利用數字、文字和符號組成的數字指令來實現一台或多台機械設備動作控制,它所控制的通常是位置、角度、速度等機械量和開關量。
數控系統及相關的自動化產品主要是為數控機床配套。數控機床是以數控系統為代表的新技術對傳統機械製造產業的滲透而形成的機電一體化產品:數控系統裝備的機床大大提高了零件加工的精度、速度和效率。這種數控的工作母機是國家工業現代化的重要物質基礎之一。
數值控制(簡稱“數控”或“NC”)的概念是把被加工的機械零件的要求,如形狀、尺寸等信息轉換成數值數據指令信號傳送到電子控制裝置,由該裝置控制驅動 機床刀具的運動而加工出零件。而在傳統的手動機械加工中,這些過程都需要經過人工操縱機械而實現,很難滿足複雜零件對加工的要求,特別對於多品種、小批量 的零件,加工效率低、精度差。
1952年,美國麻省理工學院與帕森斯公司進行合作,發明了世界上第一台三坐標數控銑床。控制裝置由2000多個電子管組成,約一個普通實驗室大小。伺服機構採用一台小伺服馬達改變液壓馬達斜盤角度以控制液動機速度。其插補裝置採用脈衝乘法器。這台NC機床的研製成功標誌著NC技術的開創和機械製造的一個新的、數值控制時代的開始。
軟體的應用
在1970年的芝加哥展覽會上,首次展出了由小型機組成的CNC數控系統。大約在同時,英特爾公司發明了微處理器。1974年,美、日等國相繼研製出以微處理器為核 心的CNC,有時也稱為MNC。它運用計算機存貯器里的程序完成數控要求的功能。其全部或部分控制功能由軟體實現,包括解碼、刀具補償、速度處理、插補、位置控制等。採用半導體存貯器存貯零件加工程序,可以代替打孔的零件紙帶程序進行加工,這種程序便於顯示、檢查、修改和編輯,因而可以減少系統的硬體配 置,提高系統的可靠性。採用軟體控制大大增加了系統的柔性,降低了系統的製造成本。
數控標準的引入
隨著NC成為機械自動化加工的重要設備,在管理和操作之間,都需要有統一的術語、技術要求、符號和圖形,即有統一的標準,以便進行世界性的技術交流和貿 易。NC技術的發展,形成了多個國際通用的標準:即ISO國際標準化組織標準、IEC國際電工委員會標準和EIA美國電子工業協會標準等。最早制訂的標準 有NC機床的坐標軸和運動方向、NC機床的編碼字元、NC機床的程序段格式、準備功能和輔助功能、數控紙帶的尺寸、數控的名詞術語等。這些標準的建立,對 NC技術的發展起到了規範和推動作用。ISO基於用戶的需要和對下一個5年間信息技術的預測,又在醞釀推出新標準“CNC控制器的數據結構”。它把 AMT(先進位造技術)的內容集中在兩個主要的級別和它們之間的連接上:第一級CAM,為車間和它的生產機械:第二級是上一級,為數據生成系統,由 CAD、CAP、 CAE和NC編程系統及相關的資料庫組成。
伺服技術的發展
伺服裝置是數控系統的重要組成部分。20世紀50年代初,世界第一台NC機床的進給驅動採用液壓驅動。由於液壓系統單位面積產生的力大於電氣系統所產生的 力(約為20:1),慣性小、反應快,因此當時很多NC系統的進給伺服為液壓系統。70年代初期,由於石油危機,加上液壓對環境的污染以及系統笨重、效率低等原因,美國GETTYS公司開發出直流大慣量伺 服電動機,靜力矩和起動力矩大,性能良好,FANUC公司很快於1974年引進並在NC機床上得到了應用。從此,開環的系統逐漸被閉環的系統取代,液壓伺 服系統逐漸被電氣伺服系統取代。
電伺服技術的初期階段為模擬控制,這種控制方法雜訊大、漂移大。隨著微處理器的採用,引入了數字控制。它有以下優點:①無溫漂,穩定性好。②基於數值計 算,精度高。③通過參數對系統設定,調整減少。④容易做成ASIC電路。對現代數控系統,伺服技術取得的最大突破可以歸結為:交流驅動取代直流驅動、數字 控制取代模擬控制、或者稱為軟體控制取代硬體控制。20世紀90年代,許多公司又研製了直線電動機,由全數字伺服驅動,剛性高,頻響好,因而可獲得高速 度。
自動編程的採用
編程的方法有手工編程和自動編程兩種。據統計分析,採用手工編程,一個零件的編程時間與機床加工之比,平均約為30:1。為了提高效率,必須採用計算機或 程編機代替手工編程。自動編程需要有自動化編程語言,其中麻省理工學院研製的APT語言是最典型的一種數控語言,它大大地提高了編程效率。從70年代開始 出現的圖象數控編程技術有效地解決了幾何造型、零件幾何形狀的顯示、交互設計、修改及刀具軌跡生成、走刀過程的模擬顯示、驗證等,從而推動了CAD和 CAM向一體化方向發展。
DNC概念的引入及發展
DNC概念從“直接數控”到“分散式數控”的變化,其內涵也發生了變化。“分散式數控”表明可用一台計算機控制多台數控機床。這樣,機械加工從單機自動化的模式 擴展到柔性生產線及計算機集成製造系統。從通信功能而言,可以在CNC系統中增加DNC介面,形成製造通信網路。網路的最大特點是資源共享,通過DNC功 能形成網路可以實現:①對零件程序的上傳或下傳。②讀、寫CNC的數據。③PLC數據的傳送。④存貯器操作控制。⑤系統狀態採集和遠程控制等。
可編程式控制制器的採用
在20世紀70年代以前,NC控制器與機床強電順序控制主要靠繼電器進行。60年代出現了半導體邏輯元件,1969年美國DEC公司研製出世界上第一台可編程序 控制器PLC。PLC很快就顯示出優越性:設計的圖形與繼電器電路相似,形象直觀,可以方便地實現程序的顯示、編輯、診斷、存貯和傳送:PLC沒有繼電器 電路那種接觸不良,觸點熔焊、磨損、線圈燒斷等缺點。因此很快在NC機床上得到應用。在NC機床上指令執行時間可達到0.085µs/步,最大步數 為32000步。而且,使用PLC還可以大大減少系統的佔用空間,提高系統的快速性和可靠性。
感測器技術的發展
一台NC系統與機械連結在一起時,它能控制的幾何精度除受機械因素的影響外,閉環系統還主要取決於所採用的感測器,特別是位置和速度感測器,如可測量直線 位移和旋轉角度的直線感應同步器和圓感應同步器、直線和圓光柵、磁尺、利用磁阻的感測器等。這些感測器由光學、精密機械、電子部件組成,一般解析度為0.01~0.001mm,測量精度為±0.02~0.002mm/m,機床工作台速度為20m/min以下。隨著機床精度的不斷提高,對感測器的解析度 和精度也提出了更高的要求。於是出現了具有“細分”電路的高解析度感測器,比如FANUC公司研製的編碼器通過細分可做到解析度為10-7r。利用它構成 的高精度數控系統為超精控制及加工創造了條件。
開放技術的產生
1987年美國空軍發表了著名的“NGC(下一代控制器)”計劃,首先提出了開放體系結構的控制器概念。這個計劃的重要內容之一便是提出了“開放系統體系結構標準 規格(SOSAS)”。美國空軍把開放的體系結構定義為:在競爭的環境中允許多個製造商銷售可相互交換和相互操作的模塊。機床製造商可以在開放系統的平台 上增加一定的硬體和軟體構成自己的系統。當前在市場上開放系統基本上有兩種結構:①CNC+PC主板:把一塊PC主板插入傳統的CNC機器中,PC板主要 運行非實時控制,CNC主要運行以坐標軸運動為主的實時控制。②PC+運動控制板:把運動控制板插入PC機的標準插槽中作實時控制用,而PC機主要作非實 時控制。為了增加開放性,主流數控系統生產廠家往往採用方案①,即在不改變原系統基本結構的基礎上增加一塊PC板,提供鍵盤使用戶能把PC和CNC聯繫在 一起,大大提高了人機界面的功能。典型的如FANUC公司的150/160/180/210系統。有些廠家也把這種裝置稱為融合系統(fusionsystem),由於它工作可靠,界面開放,越來越受到機床製造商的歡迎,成為NC技術的發展趨勢之一。
我國數控系統雖取得了較大發展,但是我國高檔數控機床配套的數控系統90%以上的都是國外產品,特別是對於國防工業急需的高檔數控機床,高檔數控系統是決定機床裝備的性能、功能、可靠性和成本的關鍵因素,而國外對我國至今仍進行封鎖限制,成為制約我國高檔數控機床發展的瓶頸。為加快數控技術行業的發展,國家出台了一系列政策,包括國務院批准實施《裝備製造業調整和振興計劃》和《高檔數控機床與基礎製造裝備》國家科技重大專項計劃,為我國數控技術行業創造了良好的外部環境,《裝備製造業調整和振興規劃》明確提出:“堅持裝備自主化與重點建設工程相結合,堅持自主開發與引進消化吸收相結合,堅持發展整機與提高基礎配套水平相結合的基本原則”,提升數控系統等基礎配套件的市場佔有率,是落實裝備自主化的重要內容。國家科技重大專項《高檔數控機床與基礎製造裝備》也提出,到2020年,國產高檔數控機床的市場佔有率要實現較大程度的提高。
目前我國正處於工業化中期,即從解決短缺為主逐步向建設經濟強國轉變,煤炭、汽車、鋼鐵、房地產、建材、機械、電子、化工等一批以重工業為基礎的高增長行業發展勢頭強勁,構成了對機床市場尤其是數控機床的巨大需求。我國機床消費額從2002年起已經連續8年排名世界第一。2009年,中國機床消費額大於世界排名第二位的日本和第三位的德國消費額之和。據國家發展改革委副主任張國寶於《在數控系統產業發展座談會上的講話》介紹,未來若干年內,我國數控機床市場需求量將繼續以年均10-15%的速度增長,市場潛力巨大。隨著中國製造業升級,中國現有普通機床也亟需改造升級,因此,數控系統行業市場空間廣闊,具備進一步發展的巨大潛力。
“十二五”期間,隨著國民經濟快速的發展,汽車、船舶、工程機械、航天航空等行業將為我國機床行業提供巨大的需求,預計到2015年我國各類數控機床及數字化機械所需數控系統需求將達到25萬台套以上(不包含進口機床所配套的數控系統),產品結構也逐漸向中、高檔轉化,其中高檔數控系統所佔比率將提升至10%左右,中檔數控系統所佔比重提升至50%左右。而根據國家科技重大專項之一《高檔數控機床與基礎製造裝備》要求,到2020年,國產中、高檔數控機床用的國產數控系統市場佔有率達到60%以上;國內中高端數控系統市場有12萬台的替代空間,未來行業空間巨大。
數字控制系統簡稱,英文名稱為Numerical Control System,早期是與計算機并行發展演化的,用於控制自動化加工設備的,由電子管和繼電器等硬體構成具有計算能力的專用控制器的稱為硬體數控(Hard NC)。20世紀70年代以後,分離的硬體電子元件逐步由集成度更高的計算機處理器代替,稱為計算機數控系統。
計算機數控(Computerized numerical control,簡稱CNC)系統是用計算機控制加工功能,實現數值控制的系統。CNC系統根據計算機存儲器中存儲的控制程序,執行部分或全部數值控制功能,並配有介面電路和伺服驅動裝置,用於控制自動化加工設備的專用計算機系統。
CNC系統由數控程序存儲裝置(從早期的紙帶到磁環,到磁帶、磁碟到計算機通用的硬碟)、計算機控制主機(從專用計算機進化到PC體系結構的計算機)、可編程邏輯控制器(PLC)、主軸驅動裝置和進給(伺服)驅動裝置(包括檢測裝置)等組成。
由於逐步使用通用計算機,數控系統日趨具有了軟體為主的色彩,又用PLC代替了傳統的機床電器邏輯控制裝置,使系統更小巧,其靈活性、通用性、可靠性更好,易於實現複雜的數控功能,使用、維護也方便,並具有與網路連接及進行遠程通信的功能。
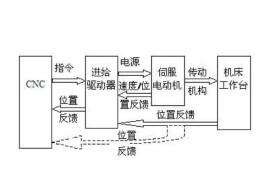
世界上的數控系統種類繁多,形式各異,組成結構上都有各自的特點。這些結構特點來源於系統初始設計的基本要求和硬體和軟體的工程設計思路。對於不同的生產廠家來說,基於歷史發展因素以及各自因地而異的複雜因素的影響,在設計思想上也可能各有千秋。例如,在上世界90年代,美國Dynapath系統採用小板結構,熱變形小,便於板子更換和靈活結合,而日本FANUC系統則趨向大板結構,減少板間插接件,使之有利於系統工作的可靠性。然而無論哪種系統,它們的基本原理和構成是十分相似的。一般整個數控系統由三大部分組成,即控制系統,伺服系統和位置測量系統。控制系統硬體是一個具有輸入輸出功能的專用計算機系統,按加工工件程序進行插補運算,發出控制指令到伺服驅動系統;測量系統檢測機械的直線和迴轉運動位置、速度,並反饋到控制系統和伺服驅動系統,來修正控制指令;伺服驅動系統將來自控制系統的控制指令和測量系統的反饋信息進行比較和控制調節,控制PWM電流驅動伺服電機,由伺服電機驅動機械按要求運動。這三部分有機結合,組成完整的閉環控制的數控系統。
控制系統硬體是具有人際交互功能,具有包括現場匯流排介面輸入輸出能力的專用計算機。伺服驅動系統主要包括伺服驅動裝置和電機。位置測量系統主要是採用長光柵或圓光柵的增量式位移編碼器。
(1)輸入數據處理程序
它接收輸入的零件加工程序,將標準代碼表示的加工指令和數據進行解碼、數據處理,並按規定的格式存放。有的系統還要進行補償計算,或為插補運算和速度控制等進行預計算。通常,輸入數據處理程序包括輸入、解碼和數據處理三項內容。
(2)插補計算程序
CNC系統根據工件加工程序中提供的數據,如曲線的種類、起點、終點、既定速度等進行中間輸出點的插值密化運算。上述密化計算不僅要嚴格遵循給定軌跡要求還要符合機械系統平穩運動加減速的要求。根據運算結果,分別向各坐標軸發出形成進給運動的位置指令。這個過程稱為插補運算。計算得到進給運動的位置指令通過CNC內或伺服系統內的位置閉環、速度環、電流環控制調節,輸出電流驅動電機帶動工作台或刀具作相應的運動,完成程序規定的加工任務。
CNC系統是一邊插補進行運算,一邊進行加工,是一種典型的實時控制方式。
(3)管理程序
管理程序負責對數據輸入、數據處理、插補運算等為加工過程服務的各種程序進行調度管理。管理程序還要對面板命令、時鐘信號、故障信號等引起的中斷進行處理。在PC化的硬體結構下,管理程序通常在實時操作系統的支持下實現。
(4)診斷程序
診斷程序的功能是在程序運行中及時發現系統的故障,並指出故障的類型。也可以在運行前或故障發生后,檢查系統各主要部件(CPU、存儲器、介面、開關、伺服系統等)的功能是否正常,並指出發生故障的部位。
從硬體結構上的角度,數控系統到目前為止可分為兩個階段共六代,第一階段為數值邏輯控制階段,其特徵是不具有CPU,依靠數值邏輯實現數控所需的數值計算和邏輯控制,包括第一代是電子管數控系統,第二代是晶體管數控系統,第三代是集成電路數控系統;第二個階段為計算機控制階段,其特徵是直接引入計算機控制,依靠軟體計算完成數控的主要功能,包括第四代是小型計算機數控系統,第五代是微型計算機數控系統,第六代是PC數控系統。
由於上世紀90年代開始,PC結構的計算機應用的普及推廣,PC構架下計算機CPU及外圍存儲、顯示、通訊技術的高速進步,製造成本的大幅降低,導致PC構架數控系統日趨成為主流的數控系統結構體系。PC數控系統的發展,形成了“NC+PC”過渡型結構,既保留傳統NC硬體結構,僅將PC作為HMI。代表性的產品包括FANUC的160i,180i,310i,840D等。還有一類即將數控功能集中以運動控制卡的形式實現,通過增擴NC控制板卡(如基於DSP的運動控制卡等)來發展PC數控系統。典型代表有美國DELTA TAU公司用PMAC多軸運動控制卡構造的PMAC-NC系統。另一種更加革命性的結構是全部採用PC平台的軟硬體資源,僅增加與伺服驅動及I/O設備通信所必需的現場匯流排介面,從而實現非常簡潔硬體體系結構。
(1)點位控制數控系統
控制工具相對工件從某一加工點移到另一個加工點之間的精確坐標位置,而對於點與點之間移動的軌跡不進行控制,且移動過程中不作任何加工。這一類系統的設備有數控鑽床、數控坐標鏜床和數控沖床等。
(2)直線控制數控系統
不僅要控制點與點的精確位置,還要控制兩點之間的工具移動軌跡是一條直線,且在移動中工具能以給定的進給速度進行加工,其輔助功能要求也比點位控制數控系統多,如它可能被要求具有主軸轉數控制、進給速度控制和刀具自動交換等功能。此類控制方式的設備主要有簡易數控車床、數控鏜銑床等。
(3)輪廓控制數控系統
這類系統能夠對兩個或兩個以上坐標方向進行嚴格控制,即不僅控制每個坐標的行程位置,同時還控制每個坐標的運動速度。各坐標的運動按規定的比例關係相互配合,精確地協調起來連續進行加工,以形成所需要的直線、斜線或曲線、曲面。採用此類控制方式的設備有數控車床、銑床、加工中心、電加工機床和特種加工機床等。
按照伺服系統的控制方式,可以把數控系統分為以下幾類:
⑴開環控制數控系統
這類數控系統不帶檢測裝置,也無反饋電路,以步進電動機為驅動元件。CNC裝置輸出的進給指令(多為脈衝介面)經驅動電路進行功率放大,轉換為控制步進電動機各定子繞組依此通電/斷電的電流脈衝信號,驅動步進電動機轉動,再經機床傳動機構(齒輪箱,絲杠等)帶動工作台移動。這種方式控制簡單,價格比較低廉,從70年代開始,被廣泛應用於經濟型數控機床中。
⑵半閉環控制數控系統
位置檢測元件被安裝在電動機軸端或絲杠軸端,通過角位移的測量間接計算出機床工作台的實際運行位置(直線位移),由於閉環的環路內不包括絲杠、螺母副及機床工作台這些大慣性環節,由這些環節造成的誤差不能由環路所矯正,其控制精度不如全閉環控制數控系統,但其調試方便,成本適中,可以獲得比較穩定的控制特性,因此在實際應用中,這種方式被廣泛採用。
⑶全閉環控制數控系統
位置檢測裝置安裝在機床工作台上,用以檢測機床工作台的實際運行位置(直線位移),並將其與CNC裝置計算出的指令位置(或位移)相比較,用差值進行調節控制。這類控制方式的位置控制精度很高,但由於它將絲杠、螺母副及機床工作台這些連接環節放在閉環內,導致整個系統連接剛度變差,因此調試時,其系統較難達到高增益,即容易產生振蕩。
⑴車削、銑削類數控系統
針對數控車床控制的數控系統和針對加工中心控制數控系統。這一類數控系統屬於最常見的數控系統。FANUC用T,M來區別這兩大類型號。西門子則是在統一的數控內核上配 置不同的編程工具:Shopmill,shopturn來區別。兩者最大的區別在於:車削系統要求能夠隨時反映刀尖點相對於車床軸線的距離,以表達當前加工工件的半徑,或乘以2表達為直徑;車削系統有各種車削螺紋的固定循環;車削系統支持主軸與C軸的切換,支持端面直角坐標系或迴轉體圓柱面坐標系編程,而數控系統要變換為極坐標進行控制;而對於銑削數控系統更多地要求複雜曲線、曲面的編程加工能力,包括五軸和斜面的加工等。隨著車銑複合化工藝的日益普及,要求數控系統兼具車削、銑削功能,例如大連光洋公司的GNC60/61系列數控系統。
置不同的編程工具:Shopmill,shopturn來區別。兩者最大的區別在於:車削系統要求能夠隨時反映刀尖點相對於車床軸線的距離,以表達當前加工工件的半徑,或乘以2表達為直徑;車削系統有各種車削螺紋的固定循環;車削系統支持主軸與C軸的切換,支持端面直角坐標系或迴轉體圓柱面坐標系編程,而數控系統要變換為極坐標進行控制;而對於銑削數控系統更多地要求複雜曲線、曲面的編程加工能力,包括五軸和斜面的加工等。隨著車銑複合化工藝的日益普及,要求數控系統兼具車削、銑削功能,例如大連光洋公司的GNC60/61系列數控系統。
數控系統
⑵磨削數控系統
針對磨床控制的專用數控系統。FANUC用G代號區別,西門子須配置功能。與其他數控系統的區別主要在於要支持工件在線量儀的接入,量儀主要監測尺寸是否到位,並通知數控系統退出磨削循環。磨削數控系統還要支持砂輪修整,並將修正後的砂輪數據作為刀具數據計入數控系統。此外,磨削數控系統的PLC還要具有較強的溫度監測和控制迴路,還要求具有與振動監測、超聲砂輪切入監測儀器接入,協同工作的能力。對於非圓磨削,數控系統及伺服驅動在進給軸上需要更高的動態性能。有些非圓加工(例如凸輪)由於被加工表面高精度和高光潔度要求,數控系統對曲線平滑技術方面也要有特殊處理。
⑶面向特種加工數控系統
這類系統為了適應特種加工往往需要有特殊的運動控制處理和加工作動器控制。例如,並聯機床控制需要在常規數控運動控制演演算法加入相應並聯結構解耦演演算法;線切割加工中需要支持沿路徑回退;沖裁切割類機床控制需要C軸保持沖裁頭處於運動軌跡切線姿態;齒輪加工則要求數控系統能夠實現符合齒輪范成規律的電子齒輪速比關係或表達式關係;激光加工則要保證激光頭與板材距離恆定;電加工則要數控系統控制放電電源;激光加工則需要數控系統控制激光能量。
⑴經濟型數控系統
又稱簡易數控系統,通常採用步進電機或脈衝串介面的伺服驅動,不具有位置反饋或位置反饋不參與位置控制;僅能滿足一般精度要求的加工,能加工形狀較簡單的直線、斜線、圓弧及帶螺紋類的零件,採用的微機系統為單板機或單片機系統;通常不具有用戶可編程的PLC功能。通常裝備的機床定位精度在0.02mm以上。
⑵普及型數控系統
介於簡式型數控系統和高性能型數控系統之間的數控系統,其特點聯動軸數4軸以下(含4軸),閉環控制(伺服電機反饋信息參與控制),具有螺距誤差補償和刀具管理功能,支持用戶開發PLC功能。
⑶高檔型數控系統
一般是指具有多通道(兩個及以上)數控設備控制能力,具有雙驅控制、5軸及以上的插補聯動功能、斜面加工、樣條插補、雙向螺距誤差補償、直線度和垂直度誤差補償、刀具管理及刀具長度和半徑補償功能、高靜態精度(解析度0.001μm即最小解析度為1nm)和高動態精度(隨動誤差0.01mm以內)、高速度及完備的PLC控制功能數控系統。
數控系統的功能適用性對於數控機床的設計選型無疑是重要的限制性因索。以下因素是在選擇數控系統中必須考慮的重要因素。
⑴驅動能力
不同的數控供應商的解決方案中伺服的功率範圍和配套電機範圍也是不同的。首先應該從可匹配的電機類型,功率範圍來初步篩選。特別是要注意數控機床方案中是否包括力矩電機、直線電機、電主軸屬於同步電主軸還是非同步電主軸,上述電機的額定電流需求和過載電流需求,電主軸的最高轉速需求等。
⑵全閉環需求與雙驅需求
數控機床,特別是大型、重型數控機床大多數都有全閉環和雙驅需求。在全閉環控制方案中,要在距離編碼光柵、絕對值式光柵、普通增量光柵間進行選擇,同時數控系統也要支持相應的反饋信號接入。
⑶五軸控制需求
五軸機床需要明確是否五軸聯動還是僅要求五面加工,相應選擇數控系統功能也不同。比如針對五面箱體類加工,通常不需要RTCP,選擇餘地就比較大。同時針對五軸功能可能涉及數控系統供貨商在出口許可證、售後服務、技術支持等也必須認真考慮。
⑷生產系統需求
數控系統網路化支持成為生產系統集成的必要條件。對於要納入自動化程度很高的生產系統的數控機床,必須明確數控系統具有相應的接入解決方案,包括低級的依靠PLC輸入輸出點直接接入到高級的數控系統內置OPC伺服器,依照OPC標準向用戶開放數控系統內部數據。此外面向生產系統,自動化的在線工件檢測和刀具檢測也是必須支持的功能。
1、位置環
這是數控系統發出控制指令,並與位置檢測系統的反饋值相比較,進一步完成控制任務的關鍵環節。它具有很高的工作頻度,並與外設相聯接,所以容易發生故障。
常見的故障有:①位控環報警:可能是測量迴路開路;測量系統損壞,位控單元內部損壞。②不髮指令就運動,可能是漂移過高,正反饋,位控單元故障;測量元件損壞。③測量元件故障,一般表現為無反饋值;機床回不了基準點;高速時漏脈衝產生報警可能的原因是光柵或讀頭髒了;光柵壞了。
2、伺服驅動系統
伺服驅動系統與電源電網,機械系統等相關聯,而且在工作中一直處於頻繁的啟動和運行狀態,因而這也是故障較多的部分。
3、電源部分
電源是維持系統正常工作的能源支持部分,它失效或故障的直接結果是造成系統的停機或毀壞整個系統。一般在歐美國家,這類問題比較少,在設計上這方面的因素考慮的不多,但在中國由於電源波動較大,質量差,還隱藏有如高頻脈衝這一類的干擾,加上人為的因素(如突然拉閘斷電等)。這些原因可造成電源故障監控或損壞。另外,數控系統部分運行數據,設定數據以及加工程序等一般存貯在RAM存貯器內,系統斷電后,靠電源的後備蓄電池或鋰電池來保持。因而,停機時間比較長,拔插電源或存貯器都可能造成數據丟失,使系統不能運行。
具有五軸功能的數控機床可以以多種姿態實現工件與刀具間的相對運動,一方面可以保持刀具更好的加工姿 態,避免刀具中心極低的切削速度,也可以避免刀具和工件、卡具間的干涉,實現有限行程內更大加工範圍。五軸功能也是衡量數控系統能力的重要指標。
對於具有轉檯結構的五軸機床,工件與迴轉工作台固結,即工件坐標系(WCS)與迴轉工作台固結。當工作台旋轉后,工件坐標系(WCS)必須相應的旋轉。此後工件坐標系的X,Y,Z與原機床坐標系(MCS)XYZ方向不再一致,五軸插補演演算法需要隨時自動完成工件坐標系的旋轉,保證正確的刀具運行軌跡,如下圖所示。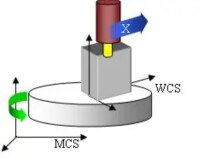
數控系統
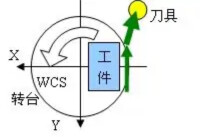
由於工件坐標系隨轉檯一起旋轉,數控系統在手動操作模式下給用戶提供了選擇機床坐標系MCS還是工件坐標系WCS的機會。如果用戶選擇了WCS下的手動操作,而且WCS已經旋轉,則手動操作將按照旋轉后的坐標軸方向運動,以C軸轉檯為例:如果C軸已由初始的0度,CCW旋轉45度后,用戶選擇WCS下手動X軸,數控機床的會XY軸聯動,走X-Y平面45度斜線,如圖1所示。上述行為對於工件的尋邊和手動定位加工很方便,不需要顧及轉檯轉了多少度,只要依據圖紙上工件坐標系所示的方向操作即可。在自動加工模式下,所有的G92,G54-G59,G52都是在WCS下設定的,都會跟隨WCS旋轉而旋轉。
自動加工中值得注意:如果用戶在工件坐標系下編程,推刀前建議用戶使用G53回到MCS下,再按照MCS坐標系執行退刀動作;否則就要想清楚當前WCS與MCS的角度關係,例如:C軸為0度時與180度時WCS坐標系正好方向相反,進刀起始位置C為0度,XY為WCS絕對值正值的話,退刀位置時C為180度,再向回到起始點就要回到WCS絕對值負值了。如圖所示。
數控系統
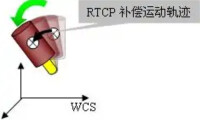
五軸加工中,不論是刀具旋轉還是轉檯轉動,都使刀尖點產生了XYZ的附加運動。五軸數控系統可以自動對這些轉動和擺動產生的工件與刀尖點間產生的位移進行補償,稱之為RTCP(圍繞刀尖點旋轉)控制功能。例如,大連光洋的GNC61採用G203起動該功能;在西門子840D中,使用TRAORI開啟RTCP;海德漢TNC530中,使用M128開啟RTCP。這樣用戶可以在五軸機床上,如同3坐標一樣的編程,可以適時加入調
數控系統
數控系統
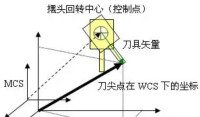
五軸編程中,推薦採用刀具相對於工件坐標系(WCS)的姿態矢量來表達工件與刀具的姿態關係。這樣處理的結果是用戶不必考慮五軸機床的具體類型和結構,相同的工件程序可以在不同類型的五軸機床上加工,所有與機床結構相關的坐標處理完全由五軸數控系統自動完成。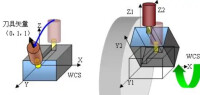
數控系統
例如,840D採用(A3,B3,C3)來表達刀具矢量;大連光洋的GNC61採用(VX,VY,VZ)表示刀具在WCS下刀尖點指向控制點的姿態,對(VX,VY,VZ)向量長度無特殊要求。
據統計,世界範圍內,五軸機床真正用於五軸聯動加工僅佔5%,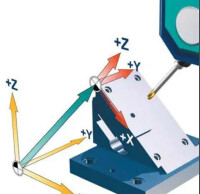 如葉輪、葉片、航空結構件等特殊零件;73% 用於五軸定向加工,如V型發動機缸體、模具製造等;五面體加工佔22%,例如機床上的箱體結構零件。
如葉輪、葉片、航空結構件等特殊零件;73% 用於五軸定向加工,如V型發動機缸體、模具製造等;五面體加工佔22%,例如機床上的箱體結構零件。
數控系統
840D中採用Frames的概念,描述空間斜面和坐標系。
TNC530中採用PLANE功能定義加工作業斜面。例如:採用空間角定義斜面:
N50 plane spatial spa+27 spb+0 spc+45 ... 空間角A:旋轉角SPA是圍繞機床固定X軸旋轉;空間角B:旋轉角SPB是圍繞機床固定Y軸旋轉;空間角C:旋轉角SPC是圍繞機床固定Z軸旋轉。除了空間角定義外,TNC530還支持投影角、歐拉角、三點等多種空間斜面定義。
數控系統
GNC61在工件坐標系WCS下,設有G92坐標系,該坐標系負責對其上的用戶定義的坐標系整體偏移,可以用來表達卡具的基準。在G92坐標系內,用戶可以定義G54, G55, G56, G57, G58, G59坐標系,可以用來表達同一卡具基準下的多個工件各自的坐標系。GNC61設計了程序局部坐標系G52,該坐標系位於G54-G59下,可以任意旋轉傾斜。在設定的加工程序中有效,一旦新載入程序,G52會自動清0。GNC61支持用戶在程序中直接定義G52(空間角)來指定一個傾斜的坐標系。此外GNC61還提供其他傾斜的坐標系定義的內建函數,包括:SG52_EULER,通過歐拉角的方式來指定G52旋轉坐標系;;SG52_2VEC,通過使用兩個矢量來定義加工面;SG52_3PT,通過三點的方式來指定G52旋轉坐標系。
數控系統
此外在定義斜面的基礎上,五軸數控系 統還需要支持刀具自動定向到垂直於斜面的姿態。海德漢的TNC530有3種處理方式MOVE、TRUN、STAY。其MOVE模式在開啟RTCP的情況下,實現刀具自動定向,即保持刀尖點不動;TRUN模式下刀具自動定向,但不開啟RTCP,即刀具只擺動,不進行RTCP補償運動;STAY則表示不產生任何運動,但相應的所需的運動量被系統變數保存。大連光洋GNC61在自動加工模式下,GNC61支持兩種自動刀具定向指令:G200刀具自動垂直斜面非RTCP;G201 刀具自動垂直斜面帶RTCP。
通常在默認狀態下所謂五軸數控系統採用五軸直線插補, 即將ABC增量等同直線增量進行插補。不論是否開啟RTCP五軸直線插補在都沒有直接約束刀具的側刃,可能造成側刃形成的零件尺寸和形貌不符合要求。為此,數控廠商往往還支持其他約束側刃的特殊的五軸插補。
即將ABC增量等同直線增量進行插補。不論是否開啟RTCP五軸直線插補在都沒有直接約束刀具的側刃,可能造成側刃形成的零件尺寸和形貌不符合要求。為此,數控廠商往往還支持其他約束側刃的特殊的五軸插補。
數控系統
1、平面刀矢插補
在沖裁模具中,存在大量側壁保持平面的要求;航空薄壁結構件也存在大量側壁傾斜要求的型腔銑削加工;焊接零件焊接坡口也有銑傾斜面的要求。840D提供ORIVECT,以及GNC61的G213都是上述功能。通常該功能自動啟動RTCP。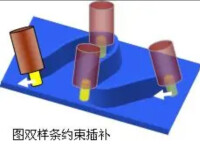
數控系統
2、雙樣條約束插補
即指定刀尖點的樣條曲線,再另一條約束刀具的樣條曲線,數控系統將完成兩樣條曲線約束的直紋面的插補。840D提供ORICURVE,以及GNC61提供的G6.3X都實現上述功能。
3、圓錐插補
指定刀具矢量沿特定圓錐表面運行。 該插補功能適合加工圓錐及空間斜面間圓錐過渡曲面。840D提供的ORICONCW\ORICONCCW\ORICONIO\ORICONTO即完成上述功能。
該插補功能適合加工圓錐及空間斜面間圓錐過渡曲面。840D提供的ORICONCW\ORICONCCW\ORICONIO\ORICONTO即完成上述功能。
數控系統
空間刀具半徑補償
對於五軸加工,RTCP起到了刀具長度補償的作用。而五軸的刀具半徑的補償可以在不修改五軸加工程序中工件表面坐標點的情況下,調整各種類型的刀具,均能保證工件表面形狀的正確。在FANUC最高級的30i系列數控系統和西門子高端的840D系統都支持上述功能。
數控系統
五軸速度平滑
在五軸加工中,由於開啟RTCP,以及各種特殊的五軸演演算法,例如平面矢量插補、雙樣條約束插補等,都可能造成各直線進給軸速度的波動,這些波動有時會造成機床振動,影響零件表面加工質量,超過機床允許範圍。為此五軸數控系統需要對各軸速度進行平滑調整。目前FANUC最高級的30i系列數控系統和西門子高端的840D系統都支持上述功能。
1、輸入:零件程序及控制參數、補償量等數據的輸入,可採用光電閱讀機、鍵盤、磁碟、連接上級計算機的DNC 介面、網路等多種形式。CNC裝置在輸入過程中通常還要完成無效碼刪除、代碼校驗和代碼轉換等工作。
2、解碼:不論系統工作在MDI方式還是存儲器方式,都是將零件程序以一個程序段為單位進行處理,把其中的各種零件輪廓信息(如起點、終點、直線或圓弧等)、加工速度信息(F 代碼)和其他輔助信息(M、S、T代碼等)按照一定的語法規則解釋成計算機能夠識別的數據形式,並以一定的數據格式存放在指定的內存專用單元。在解碼過程中,還要完成對程序段的語法檢查,若發現語法錯誤便立即報警。
3、刀具補償:刀具補償包括刀具長度補償和刀具半徑補償。通常CNC裝置的零件程序以零件輪廓軌跡編程,刀具補償作用是把零件輪廓軌跡轉換成刀具中心軌跡。在比較好的CNC裝置中,刀具補償的工件還包括程序段之間的自動轉接和過切削判別,這就是所謂的C刀具補償。
4、進給速度處理:編程所給的刀具移動速度,是在各坐標的合成方向上的速度。速度處理首先要做的工作是根據合成速度來計算各運動坐標的分速度。在有些CNC裝置中,對於機床允許的最低速度和最高速度的限制、軟體的自動加減速等也在這裡處理。
5、插補:插補的任務是在一條給定起點和終點的曲線上進行“數據點的密化”。插補程序在每個插補周期運行一次,在每個插補周期內,根據指令進給速度計算出一個微小的直線數據段。通常,經過若干次插補周期后,插補加工完一個程序段軌跡,即完成從程序段起點到終點的“數據點密化”工作。
6、位置控制:位置控制處在伺服迴路的位置環上,這部分工作可以由軟體實現,也可以由硬體完成。它的主要任務是在每個採樣周期內,將理論位置與實際反饋位置相比較,用其差值去控制伺服電動機。在位置控制中通常還要完成位置迴路的增益調整、各坐標方向的螺距誤差補償和反向間隙補償,以提高機床的定位精度。
7、I/0 處理:I/O 處理主要處理CNC裝置面板開關信號,機床電氣信號的輸入、輸出和控制(如換刀、換擋、冷卻等)。
8、顯示:CNC裝置的顯示主要為操作者提供方便,通常用於零件程序的顯示、參數顯示、刀具位置顯示、機床狀態顯示、報警顯示等。有些CNC裝置中還有刀具加工軌跡的靜態和動態圖形顯示。
9、診斷:對系統中出現的不正常情況進行檢查、定位,包括聯機診斷和離線診斷。
基本信息
- 中文名
- 數控系統
- 外文名
- Numerical Control System
- 拼音
- shù kòng xì tǒng
- 全稱
- 數字控制系統
- 配有
- 介面電路和伺服驅動裝置