非線性控制系統
非線性控制系統
狀態變數和輸出變數相對於輸入變數的運動特性不能用線性關係描述的控制系統。
非線性控制系統
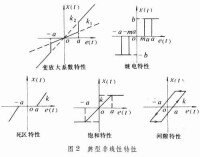
圖1是非線性控制系統的框圖,其中非線性環節的輸出x(t)是輸入e(t)的非線性函數。工程中的典型非線性特性(圖2)有:①死區(不靈敏區)特性,如測量元件的不靈敏區,伺服電壓的啟動電壓和干摩擦等特性。②飽和特性,如放大器的飽和輸出特性,伺服閥的行程限制和功率限制。③間隙特性,如齒隙特性和油隙特性。④繼電器特性。⑤變放大係數特性。
非線性控制系統
非線性控制系統
非線性系統中會出現一些在線性系統中不可能發生的奇特現象,歸納起來有如下幾點:①線性系統的穩定性和輸出特性只決定於系統本身的結構和參數。而非線性系統的穩定性和輸出動態過程,不僅與系統的結構和參數有關,而且還與系統的初始條件和輸入信號大小有關。例如,在幅值大的初始條件下系統的運動是收斂的(穩定的),而在幅值小的初始條件下系統的運動卻是發散的(不穩定的),或者情況相反。②非線性系統的平衡運動狀態,除平衡點外還可能有周期解。周期解有穩定和不穩定兩類,前者觀察不到,後者是實際可觀察到的。因此在某些非線性系統中,即使沒有外部輸入作用也會產生有一定振幅和頻率的振蕩,稱為自激振蕩,相應的相軌線為極限環。改變系統的參數可以改變自激振蕩的振幅和頻率。這個特性可應用於實際工程問題,以達到某種技術目的。例如,根據所測溫度來影響自激振蕩的條件,使之振蕩或消振,可以構成雙位式溫度調節器。③線性系統的輸入為正弦函數時,其輸出的穩態過程也是同頻率的正弦函數,兩者僅在相位和幅值上不同。但非線性系統的輸入為正弦函數時,其輸出則是包含有高次諧波的非正弦周期函數,即輸出會產生倍頻、分頻、頻率侵佔等現象。④複雜的非線性系統在一定條件下還會產生突變、分岔、混沌等現象。
非線性系統的分析遠比線性系統為複雜,缺乏能統一處理的有效數學工具,因此非線性控制系統至今尚未能象線性控制系統那樣建立起一套完善的理論體系和設計方法。在許多工程應用中,由於難以求解出系統的精確輸出過程,通常只限於考慮:①系統是否穩定;②系統是否產生自激振蕩及其振幅和頻率的測算方法;③如何限制自激振蕩的幅值以至消除它,例如一個頻率是ω的自激振蕩可被另一個頻率是ω1的振蕩抑制下去,這種非同步抑制現象已被用來抑制某些重型設備的伺服系統中由於齒隙引起的自振蕩。
在工程上還經常遇到一類弱非線性系統,即特性和運動模式與線性系統相差很小的系統。對於這類系統通常以線性系統模型作為一階近似,得出結果后再根據系統的弱非線性加以修正,以便得到較精確的結果。攝動方法是處理這類系統的常用工具。而對於本質非線性系統,則需要用分段線性化法等非線性理論和方法來處理。
現代廣泛應用於工程上的分析方法有基於頻率域分析的描述函數法和波波夫超穩定性等,還有基於時間域分析的相平面法和李雅普諾夫穩定性理論等。這些方法分別在一定的假設條件下,能提供關於系統穩定性或過渡過程的信息。而計算機技術的迅速發展為分析和設計複雜的非線性系統提供了有利的條件。
在某些工程問題中,非線性特性還常被用來改善控制系統的品質。例如將死區特性環節和微分環節(見控制系統的典型環節)同時加到某個二階系統的反饋迴路中去,就可以使系統的控制既快速又平穩。又如,可以利用繼電特性來實現最速控制系統。
非線性控制系統在許多領域都具有廣泛的應用。除了一般工程系統外,在機器人、生態系統和經濟系統的控制中也具有重要意義。
李友善主編:《自動控制原理》,國防工業出版社,北京,1981。