雷達信號檢測和信息提取
雷達信號檢測和信息提取
雷達信號檢測和信息提取:根據雷達接收到的信號檢查是否含有目標反射回波,並從反射回波中測出有關目標狀態的數據。信號是信息的載體,信息是信號的內容。雷達工程界習慣於把雷達信號檢測和信息提取的具體實施稱為雷達信號處理,並把這種處理與測出的數據的處理合稱為雷達信息處理。技術科學界最初把採用數理統計工具解決這一類信息處理的理論問題稱為檢測理論,后又稱為檢測與估計,最後稱為統計信號處理。
起源和發展早期雷達用接收機、顯示器並靠人眼觀察來完成信號檢測和信息提取的工作。接收機對目標的回波信號進行放大、變頻和檢波等,使之變成能顯示的視頻信號,送到顯示器。人們在顯示器的熒光屏上尋找類似於發射波形的信號,以確定有無目標存在和目標的位置。隨著雷達探測距離的延伸,回波變弱,放大倍數需要增加。於是,接收機前端產生的雜訊和機外各種干擾也隨著信號一起被放大,而成為影響檢測和估計性能的重要因素。這時,除了降低雜訊強度之外,還要研究接收系統頻帶寬度對發現回波和測量距離精度的影響。這是對雷達檢測理論的初期研究。後來,人們開始在各種干擾背景中對各種信號進行檢測和估計的理論研究,其中有些結論,如匹配濾波理論,關於濾波、積累、相關之間等效的理論,測量精度極限的理論,雷達模糊理論等,已在實際工作中得到應用。
信號檢測雷達檢測的背景隨機過程主要有兩種:①由天線接收進來的和由接收機前端產生的雜訊,是功率譜密度為常數的平穩隨機過程,稱為白雜訊;②發射信號受到帶有隨機起伏的物體,如地物、雲雨、箔條等的反射而造成的雜波,由於起伏有相關性,其功率譜密度不是常數,稱為非白雜訊或色雜訊。人為干擾依相對譜寬可分別歸入上述兩種。
一般檢測理論所討論的檢測信號有三種:①完全已知的確定信號;②含未知參量的確定信號;③隨機信號。雷達檢測中,最簡單的情況是理想點目標的反射信號,信號幅度和相位均屬未知。這就是上述第二種信號,稱為不起伏信號。對於帶有起伏的複雜目標,則要考慮隨機起伏的相關性和分佈。在脈衝搜索雷達中,著重研究各重複周期間完全不相關的和各天線掃描次數間完全不相關的兩種情況,即快起伏信號和慢起伏信號。
在任一種雜訊背景中發現任一種信號的檢測系統,在原理上都可以劃分成兩個部分:①對接收到的可能含有回波的信號進行處理,獲得統計量。這種處理可以是線性的,也可以是非線性的。②將所得統計量同一個門限電平相比較,按其大於還是小於門限電平作出有無目標的判斷。這個門限可以是不變的,也可以是隨信號性質而自動調整的。還有一種採用兩個門限的序列檢測法,即當統計量大於上門限時,判為有目標;當統計量小於下門限時,判為無目標;而當統計量處於兩門限之間時,增加信號持續觀察時間以獲得新的統計量進行判決。
雷達檢測的質量可用兩種概率值表示。①發現概率PD:在有目標條件下系統報出“有目標”的概率,概率越大越好;②虛警概率PF:在無目標條件下系統報出“有目標”的概率,概率越小越好。如果檢測系統的處理部分僅是線性的,輸出信號-雜訊比同上述概率具有直接的關係(圖1)。對未知相位的單個脈衝進行檢測時,若要保證,,則信號峰值應比雜訊均方根值強12倍(即16分貝)。

雷達信號檢測和信息提取
當雷達接收到的回波脈衝數目不止一個時,可以利用各次信號中回波相關而雜訊不相關的性質進行相加,以提高信-噪比。這種相加是線性的,稱為積累。只要系統中沒有非線性,對單個脈衝波形匹配濾波后積累N次完全等效於對N個脈衝波形匹配濾波的效果。
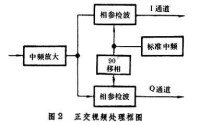
非線性處理早期雷達用以將中頻信號變成視頻信號的檢波器,只檢取幅度信息而丟棄相位信息,稱為非相參檢波,又稱包絡檢波或幅度檢波。這類檢波的本質是非線性的。當輸入信-噪比在零分貝以下,輸出信-噪比會正比例於輸入信-噪比的平方,從而破壞在檢波后積累的效果,相當於引入了檢波造成的信-噪比損失。現代雷達大多採用兩個相參檢波器,它們的參考信號相位差90°(圖2)。兩路視頻信號代表復包絡的實部與虛部,因而既含有幅度信息又含有相位信息。這種不丟失相位信息的方法稱為正交視頻處理或I、Q通道處理,又稱為零中頻處理。這種處理可以保證兩通道內對視頻信號的處理仍為線性。
雷達信號檢測和信息提取
信息提取從雷達接收到的信號中可以獲取有關目標狀態的許多信息,通常有:①由時間延遲確定的距離數據;②由多普勒頻移確定的徑向速度數據;③由天線波束狀態確定的角度數據。由於信號中混有雜訊干擾,測得的數據必然同真實數據之間存在隨機誤差和系統誤差。統計參數估計理論給出隨機誤差均方根值的極限公式,稱為克萊莫-羅不等式。按此式即可求出測量各種數據的極限精度。
距離信息根據目標反射回波相對於發射信號的時間延遲,確定目標相對於雷達天線之間的距離。在脈衝雷達中,測量時延的方法主要有前後沿門限法和門波求積法兩種。①前後沿門限法:把混有雜訊的回波信號同門限電平相比較,利用回波前沿和后沿同門限相交的兩點時刻平均值作為相對時延;②門波求積法:把混有雜訊的回波信號同一個門波信號相乘后求面積。當門波對準目標反射回波時面積應為最大,利用面積值最大時的門波位置作為相對時延的測量值。門波求積法的精度優於前後沿門限法。測量時延的極限均方根誤差為
式中ρ為信噪電壓比;為信號均方根頻帶寬度,即為信號復包絡的頻譜(已按中心頻率為零歸一化)。
速度信息根據目標反射回波頻譜相對於發射信號頻譜的多普勒頻移來確定目標同雷達天線之間的距離變化率(即徑向速度)。在脈衝雷達中,測量多普勒頻移的方法主要有鎖頻法和測向差分法兩種。①鎖頻法:用鎖頻迴路或鎖相迴路產生一個頻率等於標準中頻加目標多普勒頻移的正弦波,測量正弦波的頻率即可確定目標回波的多普勒頻移;②測相差分法:用正交視頻通道的兩路信號值求出各周期的相位,測量相鄰周期之間的相位差即可確定目標回波的多普勒頻移。測量多普勒頻移的極限均方根誤差為
,式中ρ為信-噪電壓比;墹t為信號均方根時間寬度,即
為信號復包絡(已按中心時間為零歸一化)。
角度信息測量目標回波入射方向角的方法有兩類:①天線波束是運動的,如螺旋掃描,在方位上連續掃描或俯仰。根據回波同運動之間的關係確定角度數據,稱為波束掃描法。②具有多個相對固定的天線波束,如多個饋源形成的重疊波束。根據同一時刻不同波束中收到的回波之間的強弱來確定角度數據,稱為單脈衝法。測量角度的極限均方根誤差為
,式中ρ為信-噪電壓比;λ為波長;為天線一維有效均方根長度。
參考書目
