直接轉矩控制
變頻器控制三相馬達轉矩的方式
直接轉矩控制(Direct torque control,簡稱DTC)是一種變頻器控制三相馬達轉矩的方式。其作法是依量測到的馬達電壓及電流,去計算馬達磁通和轉矩的估測值,而在控制轉矩后,也可以控制馬達的速度,直接轉矩控制是歐洲ABB公司的專利。
直接轉矩控制(Direct Torque Control——DTC),國外的原文有的也稱為Direct self-control——DSC,直譯為直接自控制,這種“直接自控制”的思想以轉矩為中心來進行綜合控制,不僅控制轉矩,也用於磁鏈量的控制和磁鏈自控制。直接轉矩控制與矢量控制的區別是,它不是通過控制電流、磁鏈等量間接控制轉矩,而是把轉矩直接作為被控量控制,其實質是用空間矢量的分析方法,以定子磁場定向方式,對定子磁鏈和電磁轉矩進行直接控制的。這種方法不需要複雜的坐標變換,而是直接在電機定子坐標上計算磁鏈的模和轉矩的大小,並通過磁鏈和轉矩的直接跟蹤實現PWM脈寬調製和系統的高動態性能。直接轉矩控制(Direct Torque Control,DTC)變頻調速,是繼矢量控制技術之後又一新型的高效變頻調速技術。20世紀80年代中期,德國魯爾大學的M.Depenbrock教授和日本的I.Takahashi教授分別提出了六邊形直接轉矩控制方案和圓形直接轉矩控制方案。1987年,直接轉矩控制理論又被推廣到弱磁調速範圍。直接轉矩控制技術用空間矢量的分析方法,直接在定子坐標系下計算與控制電動機的轉矩,採用定子磁場定向,藉助於離散的兩點式調節(Band-Band)產生PWM波信號,直接對逆變器的開關狀態進行最佳控制,以獲得轉矩的高動態性能。它省去了複雜的矢量變換與電動機的數學模型簡化處理,沒有通常的PWM 信號發生器。它的控制思想新穎,控制結構簡單,控制手段直接,信號處理的物理概念明確。直接轉矩控制也具有明顯的缺點即:轉矩和磁鏈脈動。
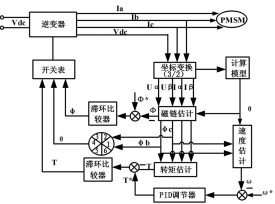
在直接轉矩控制中,電機定子磁鏈的幅值通過上述電壓的矢量控制而保持為額定值,要改變轉矩大小,可以通過控制定、轉子磁鏈之間的夾角來實現。而夾角可以通過電壓空間矢量的控制來調節。由於轉子磁鏈的轉動速度保持不變,因此夾角的調節可以通過調節定子磁鏈的瞬時轉動速度來實現。假定電機轉子逆時針方向旋轉,如果實際轉矩小於給定值,則選擇使定子磁鏈逆時針方向旋轉的電壓矢量,這樣角度增加,實際轉矩增加,一旦實際轉矩高與給定值,則選擇電壓矢量使定子磁鏈反方向旋轉。從而導致角度降低。通過這種方式選擇電壓矢量,定子磁鏈一直旋轉,且其旋轉方向由轉矩滯環控制器決定。直接轉矩控制對轉矩和磁鏈的控制要通過滯環比較器來實現。滯環比較器的運行原理為:當前值與給定值的誤差在滯環比較器的容差範圍內時,比較器的輸出保持不變,一旦超過這個範圍,滯環比較器便給出相應的值。直接轉矩控制的原理,給定轉速與估計轉速相比較,得到給定轉矩;經轉矩調節器將轉矩差做滯環處理得到轉矩控制信號;將磁鏈估計值跟給定磁鏈相比,經滯環比較器得到磁鏈控制信號;根據計算的得到的轉子位移,劃分區段;根據區段,以及轉矩和磁鏈控制信號,結合查找表得出空間矢量,生成PWM波;輸出給逆變器,給電機供電。
與VC系統一樣,它也是分別控制非同步電動機的轉速和磁鏈,但在具體控制方法上,DTC系統與VC系統不同的特點是:
2)選擇定子磁鏈作為被控量,而不象VC系統中那樣選擇轉子磁鏈,這樣一來,計算磁鏈的模型可以不受轉子參數變化的影響,提高了控制系統的魯棒性。如果從數學模型推導按定子磁鏈控制的規律,顯然要比按轉子磁鏈定向時複雜,但是,由於採用了砰-砰控制,這種複雜性對控制器並沒有影響。
3)由於採用了直接轉矩控制,在加減速或負載變化的動態過程中,可以獲得快速的轉矩響應,但必須注意限制過大的衝擊電流,以免損壞功率開關器件,因此實際的轉矩響應的快速性也是有限的。
4)定子坐標系下分析電機的數學模型直接控制磁鏈和轉矩,不需要和直流機比較、等效、轉化,省去複雜的計算。
性能比較
從總體控制結構上看,直接轉矩控制(DTC)系統和矢量控制(VC)系統是一致的,都能獲得較高的靜、動態性能。
針對其不足之處,現在的直接轉矩控制技術相對於早期的直接轉矩控制技術有了很大的改進,主要體現在以下幾個方面:
(1)無速度感測器直接轉矩控制系統的研究
在實際應用中,安裝速度感測器會增加系統成本,增加了系統的複雜性,降低系統的穩定性和可靠性,此外,速度感測器不實用於潮濕、粉塵等惡劣的環境下。因此,無速度感測器的研究便成了交流傳動系統中的一個重要的研究方向,且取得了一定的成果。對轉子速度估計的方法有很多,常用的有卡爾曼濾波器位置估計法、模型參考自適應法、磁鏈位置估計法、狀態觀測器位置估計法和檢測電機相電感變化法等。有的學者從模型參考自適應理論出發,利用轉子磁鏈方程構造了無速度感測器直接轉矩控制系統,只要選擇適當的參數自適應律,速度辨識器就可以比較準確地辨識出電機速度。
(2)定子電阻變化的影響
直接轉矩最核心的問題之一是定子磁鏈觀測,而定子磁鏈的觀測要用到定子電阻。採用簡單的u-i磁鏈模型,在中高速區,定子電阻的變化可以忽略不考慮,應用磁鏈的u-i磁鏈模型可以獲得令人滿意的效果;但在低速時定子電阻的變化將影響磁通發生畸變,使系統性能變差。因此,如果能夠對定子電阻進行在線辨識,就可以從根本上消除定子電阻變化帶來的影響。目前,常用的方法有參考模型自適應法、卡爾曼濾波法、神經網路以及模糊理論構造在線觀測器的方法對定子電阻進行補償,研究結果表明,在線辨識是一個有效的方法。
(3)磁鏈和轉矩滯環的改進
傳統的直接轉矩控制一般對轉矩和磁鏈採用單滯環控制,根據滯環輸出的結果來確定電壓矢量。因為不同的電壓矢量對轉矩和定子磁鏈的調節作用不相同,所以只有根據當前轉矩和磁鏈的實時值來合理的選擇。電壓矢量,才能有可能使轉矩和磁鏈的調節過程達到比較理想的狀態。顯然,轉矩和磁鏈的偏差區分的越細,電壓矢量的選擇就越精確,控制性能也就越好。
(4)死區效應的解決
為了避免上下橋臂同時導通造成直流側短路,有必要引入足夠大的互鎖延時,結果帶來了死區效應。死區效應積累的誤差使逆變器輸出電壓失真,於是又產生電流失真,加劇轉矩脈動和系統運行不穩定等問題,在低頻低壓時,問題更嚴重,還會引起轉矩脈動。死區效應的校正,可由補償電路檢測並記錄死區時間,進行補償。這樣既增加了成本,又降低了系統的可靠性。可用軟體實現的方法,即計算出所有的失真電壓,根據電流方向製成補償電壓指令表,再用前向反饋的方式補償,這種新型方案還消除了零電壓箝位現象。除了以上幾種最主要的方面外,一些學者還通過其他途徑試圖提高系統的性能。直接轉矩控制的特徵是控制定子磁鏈,是直接在定子靜止坐標系下,以空間矢量概念,通過檢測到的定子電壓、電流,直接在定子坐標系下計算與控制電動機的磁鏈和轉矩,獲得轉矩的高動態性能。它不需要將交流電動機化成等效直流電動機,因而省去了矢量變換中的許多複雜計算,它也不需要模仿直流電動機的控制,從而也不需要為解耦而簡化交流電動機的數學模型,而只需關心電磁轉矩的大小,因此控制上對除定子電阻外的所有電機參數變化魯棒性良好,所引入的定子磁鏈觀測器能很容易得到磁鏈模型,並方便地估算出同步速度信息,同時也很容易得到轉矩模型,磁鏈模型和轉矩模型就構成了完整的電動機模型,因而能方便地實現無速度感測器控制,如果在系統中再設置轉速調節器,即可進一步得到高性能動態轉矩控制了。需要說明的是,直接轉矩控制的逆變器採用不同的開關器件,控制方法也有所不同。Depenbrock最初提出的直接自控制理論,主要在高壓、大功率且開關頻率較低的逆變器控制中廣泛應用。目前被應用於通用變頻器的控制方法是一種改進的、適合於高開關頻率逆變器的方法。1995年ABB公司首先推出的ACS600系列直接轉矩控制通用變頻器,動態轉矩響應速度已達到<2ms,在帶速度感測器PG時的靜態速度精度達土0.001%,在不帶速度感測器PG的情況下即使受到輸入電壓的變化或負載突變的影響,同樣可以達到±0.1%的速度控制精度。其他公司也以直接轉矩控制為努力目標,如富士公司的FRENIC5000VG7S系列高性能無速度感測器矢量控制通用變頻器,雖與直接轉矩控制方式還有差別,但它也已做到了速度控制精度±0.005%,速度響應100Hz、電流響應800Hz和轉矩控制精度±3%(帶PG)。其他公司如日本三菱、日立、芬蘭VASON等最新的系列產品採取了類似無速度感測器控制的設計,性能有了進一步提高
基本信息
- 中文名
- 直接轉矩控制
- 簡稱
- DTC
- 性質
- 一種變頻器控制三相馬達轉矩的方式
- 測量依據
- 測到的馬達電壓及電流
- 計算值
- 馬達磁通和轉矩的估測值
- 外文名
- Direct Torque Control