自動駕駛儀
讓飛行器實現自動駕駛的機器
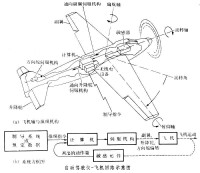
自動駕駛儀(autopilot),是按技術要求自動控制飛行器軌跡的調節設備,其作用主要是保持飛機姿態和輔助駕駛員操縱飛機。對無人駕駛飛機,它將與其他導航設備配合完成規定的飛行任務。導彈上的自動駕駛儀起穩定導彈姿態的作用,故稱導彈姿態控制系統。自動駕駛儀是模仿駕駛員的動作駕駛飛機的。它由敏感元件、計算機和伺服機構組成。當飛機偏離原有姿態時,敏感元件檢測變化,計算機算出修正舵偏量,伺服機構將舵面操縱到所需位置。

自動駕駛儀
現代自動駕駛儀的趨勢是向數字化和智能化方向發展。80年代以前,戰術導彈由於工作時間短、工作環境條件惡劣(如很大的過載)等較少採用數字式自動駕駛儀。微型計算機出現后,戰術導彈開始採用數字式自動駕駛儀。近代空戰中,自動駕駛儀能以最佳方式操縱戰鬥機,例如以最短的時間飛到最有利的位置。在導彈攻擊目標時,自動駕駛儀與制導系統配合使導彈能識別敵友、分析敵情變化並作出最優決策。這就要求自動駕駛儀具有智能的功能。
在現代軍事科學方面,自動駕駛儀因可替代人駕駛飛機被應用於無人機方面,包括無人定翼飛機和無人直升機等無人飛行器。使用MEMS慣性器件和全球定位系統相結合的GPS/INS組合導航系統、使用自適應和神經網路等高級控制演演算法以及體積小重量輕集成度高都已經成為了現代自動駕駛儀的標誌。

HeliAP無人直升機自動駕駛儀外觀
50年代,通過在自動駕駛儀中引入角速率信號的方法製成阻尼器或增穩系統,改善了飛機的穩定性,自動駕駛儀發展成飛行自動控制系統。50年代後期,又出現自適應自動駕駛儀,能隨飛行器特性的變化而改變自身的結構和參數。
60年代末,數字式自動駕駛儀在阿波羅飛船中得到應用。自動駕駛儀種類很多,可按能源形式、使用對象、調節規律等分類。現代自動駕駛儀的趨勢是向數字化和智能化方向發展。
現代自動駕駛儀已廣泛應用於飛機,而且一般都是數字式自動駕駛儀。機載計算機能夠確定最佳飛行路線,包括爬升和下降等,並對油門和各控制翼面發出指令。各種先進的顯示屏幕取代了種類繁多的儀錶盤,直觀地顯示出沿途檢驗點和飛機航向等信息。
HeliAP無人直升機自動駕駛儀面站軟體
分為氣壓式、液壓式、電氣式或者是這幾種形式的組合。現代超音速飛機多安裝電氣(或電子)—液壓式自動駕駛儀。氣壓式伺服機構主要用於導彈。
分為飛機自動駕駛儀和導彈自動駕駛儀。飛機自動駕駛儀多具有檢測飛機姿態角的敏感元件,能穩定飛機的姿態角。為了提高這種自動駕駛儀的穩定效果,可配合使用速率陀螺儀。戰術導彈只需要穩定角速度,其姿態角根據目標的運動而改變,因此,在自動駕駛儀中不設檢測角位置的敏感元件。巡航導彈、戰略導彈和運載火箭需要穩定姿態角,在這些飛行器的自動駕駛儀中仍有檢測姿態角的敏感元件。
的
自動駕駛儀的調節規律(即數學模型)表示伺服機構的輸出量與被調參量之間的函數關係。飛機自動駕駛儀依調節規律的不同分為比例式自動駕駛儀和積分式自動駕駛儀。比例式自動駕駛儀是以伺服機構輸出的位置偏移量(如舵偏角)與被調參量(如姿態角)的偏差成比例的原理工作的。它的結構簡單,應用很廣,但在干擾作用下會產生靜態誤差。積分式自動駕駛儀是以伺服機構輸出的位置偏移量與被調參量偏差的積分成比例的原理工作的,它沒有靜態誤差,但系統的穩定性差,結構複雜,應用受到一定限制。
導彈自動駕駛儀按被調參量的性質可分為位置式自動駕駛儀、定向式自動駕駛儀和加速度式自動駕駛儀。位置式自動駕駛儀的被調參量是飛行器的角位置(即姿態角),伺服機構的輸出量與姿態角的偏差成比例。定向式自動駕駛儀的被調參量是飛行器的姿態角速度,伺服機構的輸出量與姿態角速度的偏差成比例。加速度式自動駕駛儀的被調參量是飛行器的法向加速度,伺服機構的輸出量與法向加速度的偏差成比例。

基本信息
- 中文名
- 自動駕駛儀
- 外文名
- Autopilot
- 目的
- 讓飛行器實現自動駕駛
- 應用
- 飛機器