焊接機器人
從事焊接的工業機器人
焊接機器人是從事焊接(包括切割與噴塗)的工業機器人。根據國際標準化組織(ISO)工業機器人屬於標準焊接機器人的定義,工業機器人是一種多用途的、可重複編程的自動控制操作機(Manipulator),具有三個或更多可編程的軸,用於工業自動化領域。為了適應不同的用途,機器人最後一個軸的機械介面,通常是一個連接法蘭,可接裝不同工具或稱末端執行器。焊接機器人就是在工業機器人的末軸法蘭裝接焊鉗或焊(割)槍的,使之能進行焊接,切割或熱噴塗。
隨著電子技術、計算機技術、數控及機器人技術的發展,自動焊接機器人, 從60年代開始用於生產以來,其技術已日益成熟,主要有以下 優點:
1)穩定和提高焊接質量,能將焊接質量以數值的形式反映出來;
2)提高勞動生產率;
3)改善工人勞動強度,可在有害環境下工作;
4)降低了對工人操作技術的要求;
5)縮短了產品改型換代的準備周期,減少相應的設備投資。
因此,在各行各業已得到了廣泛的應用。
焊接機器人主要包括機器人和焊接設備兩部分。機器人由機器人本體和控制櫃(硬體及軟體)組成。而焊接裝備,以弧焊及點焊為例,則由焊接電源,(包括其控制系統)、送絲機(弧焊)、焊槍(鉗)等部分組成。對於智能機器人還應有感測系統,如激光或攝像感測器及其控制裝置等。圖1a、b表示弧焊機器人和點焊機器人的基本組成。
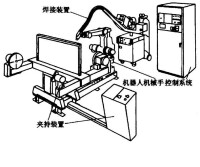
焊接機器人示意圖
上述兩種機器人各個軸都是作迴轉運動,故採用伺服電機通過擺線針輪(RV)減速器(1~3軸)及諧波減速器(1~6軸)驅動。在80年代中期以前,對於電驅動的機器人都是用直流伺服電機,而80年代後期以來,各國先後改用交流伺服電機。由於交流電機沒有碳刷,動特性好,使新型機器人不僅事故率低,而且免維修時間大為增長,加(減)速度也快。一些負載16kg以下的新的輕型機器人其工具中心點(TCP)的最高運動速度可達3m/s以上,定位準確,振動小。同時,機器人的控制櫃也改用32位的微機和新的演演算法,使之具有自行優化路徑的功能,運行軌跡更加貼近示教的軌跡。
點焊對焊接機器人的要求不是很高。因為點焊只需點位控制,至於焊鉗在點與點之間的移動軌跡沒有嚴格要求,這也是機器人最早只能用於點焊的原因。點焊用機器人不僅要有足夠的負載能力,而且在點與點之間移位時速度要快捷,動作要平穩,定位要準確,以減少移位的時間,提

焊接機器人
由於所設計的焊接機器人是在准平面、空間狹窄的環境下工作,為了保證機器人能根據電弧感測器的偏差信息,跟蹤焊縫自動焊接,要求所設計的機器人應該結構緊湊、移動靈活且工作穩定.文中針對狹窄空間特點,開發了一種小型移動焊接機器人,根據機器人各結構的運動特點,運用模塊化設計方法,把機器人機構分為輪式移動平台、焊炬調節機構和電弧感測器三部分。其中,輪式移動平台由於其慣性大,響應慢,主要對焊縫進行粗跟蹤,焊炬調節機構負責焊縫精確跟蹤,電弧感測器完成焊縫偏差實時識別.另外,機器人控制器和電機驅動器集成安裝於機器人移動平台上,使其體積更小。同時,為了減少惡劣焊接環境下粉塵對運動部件影響,採用全封閉式結構,提高其系統可靠性。
點焊機器人的焊接裝備,由於採用了一體化焊鉗,焊接變壓器裝在焊鉗後面,所以變壓器必須盡量小型化。對於容量較小的變壓器可以用50Hz工頻交流,而對於容量較大的變壓器,已經開始採用逆變技術把50Hz工頻交流變為600~700Hz交流,使變壓器的體積減少、減輕。變壓后可以直接用600~700Hz交流電焊接,也可以再進行二次整流,用直流電焊接。焊接參數由定時器調節,參見圖1b。新型定時器已經微機化,因此機器人控制櫃可以直接控制定時器,無需另配介面。點焊機器人的焊鉗,通常用氣動的焊鉗,氣動焊鉗兩個電極之間的開口度一般只有兩級衝程。而且電極壓力一旦調定后是不能隨意變化的。近年來出現一種新的電伺服點焊鉗,如圖4所示。焊鉗的張開和閉合由伺服電機驅動,碼盤反饋,使這種焊鉗的張開度可以根據實際需要任意選定並預置。而且電極間的壓緊力也可以無級調節。這種新的電伺服點焊鉗具有如下優點:
1)每個焊點的焊接周期可大幅度降低,因為焊鉗的張開程度是由機器人精確控制的,機器人在點與點之間的移動過程、焊鉗就可以開始閉合;而焊完一點后,焊鉗一邊張開,機器人就可以一邊位移,不必等機器人到位后焊鉗才閉合或焊鉗完全張開后機器人再移動;
2)焊鉗張開度可以根據工件的情況任意調整,只要不發生碰撞或干涉儘可能減少張開度,以節省焊鉗開度,以節省焊鉗開合所佔的時間。
3)焊鉗閉合加壓時,不僅壓力大小可以調節,而且在閉合時兩電極是輕輕閉合,減少撞擊變形和雜訊。

點焊機器人FANUC R-2000iB
如果工件在整個焊接過程中無需變位,就可以用夾具把工件定位在工作檯面上,這種系統既是最簡單不過的了。但在實際生產中,更多的工件在焊接時需要變位,使焊縫處在較好的位置(姿態)下焊接。對於這種情況,變位機與機器人可以是分別運動,即變位機變位后機器人再焊接;也可以是同時運動,即變位機一邊變位,機器人一邊焊接,也就是常說的變位機與機器人協調運動。這時變位機的運動及機器人的運動複合,使焊槍相對於工件的運動既能滿足焊縫軌跡又能滿足焊接速度及焊槍姿態的要求。實際上這時變位機的軸已成為機器人的組成部分,這種焊接機器人系統可以多達7-20個軸,或更多。最新的機器人控制櫃可以是兩台機器人的組合作12個軸協調運動。其中一台是焊接機器人、另一台是搬運機器人作變位機用。
對焊接機器人工作站進一步細分,可得以下四種:
箱體焊接機器人工作站由弧焊機器人、焊接電源、焊槍送絲機構、迴轉雙工位變位機、工裝夾具和控制系統組成。該工作站適用於各式箱體類工件的焊接,在同一工作站內通過使用不停的夾具可實現多品種的箱體自動焊接,焊接的相對位置高。由於採用雙工位變位機,焊接的同時,其他工位可拆裝工件,極大的提高了焊接效率。由於採用了MIG脈衝過渡或CMT冷金屬過渡焊接工藝方式進行焊接,使焊接過程中熱輸入量大大減少,保證產品焊接后不變形,通過調整焊接規範和機器人焊接姿態,保證產品焊縫質量好,焊縫美觀,特別對於密封性要求高的不鏽鋼氣室,焊接后保證氣室氣體不泄露。通過設置控制系統中的品種選擇參數並更換工作夾具,可實現多個品種箱體的自動焊接。
用不同工作範圍的弧焊機器人和相應尺寸的變位機,工作站可以滿足焊縫長度在2000mm左右的各類箱體的焊接要求。焊接速度3-10mm/s,根據箱體基本材料,焊接工藝採用不同類型的氣體保護焊。該工作站還廣泛用於電力、電氣、機械、汽車等行業。
1.2 不鏽鋼氣室機器人柔性激光焊接加工設備是針對不鏽鋼焊接變形量比較大,密封性要求高的箱體類工件焊接開發的的柔性機器人激光焊接加工設備。該加工設備是由機器人、激光發生器機組、水冷卻機組、激光掃描跟蹤系統、柔性變位機、工裝夾具、安全護欄、吸塵裝置和控制系統等組成,通過設置控制系統中的品種選擇參數並更換工裝夾具,可實現多個品種的不鏽鋼氣室類工件的自動焊接。
軸類焊接機器人工作站由弧焊機器人、焊接電源、焊槍送絲機構、迴轉雙工位變位機、工裝夾具和控制系統組成。該工作站用於以轉軸為基體(上置若干懸臂)的各類工件的焊接,在同一工作站內通過使用不同的夾具可實現多品種的轉軸自動焊接。焊接的現對位置精度很高。由於採用雙工位變位機,焊接的同時,其他工位可拆裝工件,極大的提高了效率。
廣泛應用於高質量、高精度的以轉軸的各類工件焊接,適用於電力、電氣、機械、汽車等行業。如果採用手工電弧焊進行轉軸焊接,工人勞動強度極大,產品的一致性差,生產效率低,僅為2-3件/小時。採用自動焊接工作站后,產量可達到15-20件/小時,焊接質量和產品的一致性也大幅度的提高。
軸類焊接機器人工作站 低壓電器轉軸
1.4 機器人焊接螺柱工作站
機器人焊接螺柱工作站針對複雜零件上具有不同規格螺柱採用機器人將螺柱焊接到工件上。該工作站主要由機器人、螺柱焊接電源、自動送釘機、機器人自動螺柱焊槍、變位機、工裝夾具、自動換槍裝置、自動檢測軟體、控制系統和安全護欄等組成,通過自動送釘機將螺柱送到機器人自動焊槍裡面,通過編程將機器人在工件上示教的路徑,將不同規格的螺柱焊接到工件上。可以採用儲能焊接或拉弧焊接將螺柱牢牢的焊接到工件上,保證焊接精度和焊接強度。焊接效率大約3-10個/分鐘,螺柱規格:直徑3-8mm,長度:5-40mm。
焊接機器人生產線比較簡單的是把多台工作站(單元)用工件輸送線連接起來組成一條生產線。這種生產線仍然保持單站的特點,即每個站只能用選定的工件夾具及焊接機器人的程序來焊接預定的工件,在更改夾具及程序之前的一段時間內,這條線是不能焊其他工件的。
另一種是焊接柔性生產線(FMS-W)。柔性線也是由多個站組成,不同的是被焊工件都裝卡在統一形式的托盤上,而托盤可以與線上任何一個站的變位機相配合併被自動卡緊。焊接機器人系統首先對托盤的編號或工件進行識別,自動調出焊接這種工件的程序進行焊接。這樣每一個站無需作任何調整就可以焊接不同的工件。焊接柔性線一般有一個軌道子母車,子母車可以自動將點固好的工件從存放工位取出,再送到有空位的焊接機器人工作站的變位機上。也可以從工作站上把焊好的工件取下,送到成品件流出位置。整個柔性焊接生產線由一台調度計算機控制。因此,只要白天裝配好足夠多的工件,並放到存放工位上,夜間就可以實現無人或少人生產了。
工廠選用哪種自動化焊接生產形式,必須根據工廠的實際情況及素要而定。焊接專機適合批量大,改型慢的產品,而且工件的焊縫數量較少、較長,形狀規矩(直線、圓形)的情況;焊接機器人系統一般適合中、小批量生產,被焊工件的焊縫可以短而多,形狀較複雜。柔性焊接線特別適合產品品種多,每批數量又很少的情況,目前國外企業正在大力推廣無(少)庫存,按訂單生產(JIT)的管理方式,在這種情況下採用柔性焊接線是比較合適的。
焊接機器人目前已廣泛應用在汽車製造業,汽車底盤、座椅骨架、導軌、消聲器以及液力變矩器等焊接,尤其在汽車底盤焊接生產中得到了廣泛的應用。豐田公司已決定將點焊作為標準來裝備其日本國內和海外的所有點焊機器人。用這種技術可以提高焊接質量,因而甚至試圖用它來代替某些弧焊作業。在短距離內的運動時間也大為縮短。該公司最近推出一種高度低的點焊機器人,用它來焊接車體下部零件。這種矮小的點焊機器人還可以與較高的機器人組裝在一起,共同對車體上部進行加工,從而縮短了整個焊接生產線長度。國內生產的桑塔納、帕薩特、別克、賽歐、波羅等後橋、副車架、搖臂、懸架、減振器等轎車底盤零件大都是以MIG焊接工藝為主的受力安全零件,主要構件採用衝壓焊接,板厚平均為1.5~4mm,焊接主要以搭接、角接接頭形式為主,焊接質量要求相當高,其質量的好壞直接影響到轎車的安全性能。應用機器人焊接后,大大提高了焊接件的外觀和內在質量,並保證了質量的穩定性和降低勞動強度,改善了勞動環境。

汽車總裝車間 FANUC機器人
作為海洋工程裝備技術的重要組成部分,海洋焊接如今已成為海洋資源開發和海洋工程建設不可缺少的基礎和支撐技術。經過大量的工藝試驗和配方調整,研發的焊接材料以及水下焊接專用設備,已成功應用於勝利油田海上採油平台、港珠澳大橋等海洋工程。

弧焊機器人FANUC M-10iA
雖然從理論上講,有5個軸的機器人就可以用於電弧焊,但是對複雜形狀的焊縫,用5個軸的機器人會有困難。因此,除非焊縫比較簡單,否則應盡量選用6軸機器人。
弧焊機器人除前面圖2提及的在作“之”字形拐角焊或小直徑圓焊縫焊接時,其軌跡應能貼近示教的軌跡之外,還應具備不同擺動樣式的軟體功能,供編程時選用,以便作擺動焊,而且擺動在每一周期中的停頓點處,機器人也應自動停止向前運動,以滿足工藝要求。此外,還應有接觸尋位、自動尋找焊縫起點位置、電弧跟蹤及自動再引弧功能等。
弧焊機器人多採用氣體保護焊方法(MAG、MIG、TIG),通常的晶閘管式、逆變式、波形控制式、脈衝或非脈衝式等的焊接電源都可以裝到機器人上作電弧焊。由於機器人控制櫃採用數字控制,而焊接電源多為模擬控制,所以需要在焊接電源與控制櫃之間加一個介面。近年來,國外機器人生產廠都有自己特定的配套焊接設備,這些焊接設備內已經播人相應的介面板、所以在圖1a中的弧焊機器人系統中並沒有附加介面箱。應該指出,在弧焊機器人工作周期中電弧時間所佔的比例較大,因此在選擇焊接電源時,一般應按持續率100%來確定電源的容量。
送絲機構可以裝在機器人的上臂上,也可以放在機器人之外,前者焊槍到送絲機之間的軟管較短,有利於保持送絲的穩定性,而後者軟管校長,當機器人把焊槍送到某些位置,使軟管處於多彎曲狀態,會嚴重影響送絲的質量。所以送絲機的安裝方式一定要考慮保證送絲穩定性的問題。
一。日檢查及維護
1.送絲機構。包括送絲力距是否正常,送絲導管是否損壞,有無異常報警。2.氣體流量是否正常。3.焊槍安全保護系統是否正常。(禁止關閉焊槍安全保護工作)4.水循環系統工作是否正常。5.測試TCP(建議編製一個測試程序,每班交接后運行)
二。周檢查及維護
1.擦洗機器人各軸。2.檢查TCP的精度。3.檢查清渣油油位。4.檢查機器人各軸零位是否準確。5.清理焊機水箱後面的過濾網。6.清理壓縮空氣進氣口處的過濾網。7.清理焊槍噴嘴處雜質,以免堵塞水循環。8.清理送絲機構,包括送絲輪,壓絲輪,導絲管。9.檢查軟管束及導絲軟管有無破損及斷裂。(建議取下整個軟管束用壓縮空氣清理)10.檢查焊槍安全保護系統是否正常,以及外部急停按鈕是否正常。
三。月檢查及維護

基本信息
- 中文名
- 焊接機器人
- 外文名
- welding robot
- 功能
- 焊接
- 結構組成
- 機器人和焊接設備兩部分
- 優點1
- 提高勞動生產率
- 實質
- 從事焊接的工業機器人
- 優點2
- 將焊接質量變成數字化、更可控